三维激光扫描测绘技术在建设工程施工监测中的应用
2019-01-25周克勤北京建工京精大房工程建设监理公司北京100044
周克勤(北京建工京精大房工程建设监理公司, 北京 100044)
0 引 言
三维激光扫描测绘技术出现于 20 世纪 90 年代,该技术通过高速激光扫描精确测量的方法,快速、大量地采集空间点位信息,获取被测对象表面数据,具有高效、快速、准确、无接触等优势,能够获得物体三维数字信息,制作形式多样的数字产品。
近十几年来,该项技术发展迅速,在文化遗产保护规划设计、建设工程测量、异形建筑物与构筑物数据采集、自然灾害调查与监测、城乡规划建设等领域均有大量应用。随着地面扫描设备软硬件的发展,该项技术已逐步推广到建设工程施工监测领域。
1 三维激光扫描测绘技术原理
1.1 扫描仪工作原理
三维激光扫描仪是一种集成多种高新技术的扫描测量系统,主要由线结构激光光源、彩色 CCD 摄像机、马达控制可旋转的滤光镜、控制电路板和计算机及相应软硬件组成。其核心技术有两个。其一是空间点阵扫描技术。通过内部伺服马达系统精密控制多面反射棱镜的转动,使激光束沿X、Y两个方向快速扫描,实现高精度的小角度扫描间隔、大范围扫描幅度及高帧频成像。其二是激光无反射棱镜长距离快速测距技术。通过记录激光飞行的时间可以得到仪器到目标点的距离。
1.2 三维坐标测量原理
扫描仪通过获取激光束与被测物体之间的传播时间差得到扫描仪到被测物体的距离,利用编码器来测量镜头旋转角度与扫描仪水平旋转角度,从而获得每一个点的三维坐标,即同步得到激光发射点到目标点的距离S、激光脉冲横向扫描角度观测值α和纵向扫描角度观测值θ。地面激光扫描三维测量使用仪器内部坐标系统,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直,如图 1 所示。
1.3 扫描仪简介
根据不同的激光测距工作原理,可将目前市场的地面三维激光扫描仪大致分为三类,即:脉冲式扫描仪、相位式扫描仪和三角测距扫描仪。
1.3.1 脉冲式扫描仪
优点:扫描距离远,可以达到数千米,受天气因素影响较小。
缺点:近距离扫描效果较差。
代表性仪器如:RIEGL、I-Site、Leica 等。
1.3.2 相位式扫描仪
优点:扫描速度较快、点密度大、可以近距离扫描。
缺点:扫描距离相对较近(通常是几十米至几百米),受天气因素影响较大。
代表性仪器如:FARO、Z+F 等。
1.3.3 三角测距扫描仪
优点:适用于微小体量目标物、较高精度的三维数据采集。
缺点:扫描距离较短,受外界气候条件影响较大。
代表性仪器如:EXAscan、Artec Spider 等。
不同类型设备有着各自不同的应用特点,在条件允许情况下,选用合适的扫描设备能够更有针对性地解决工程问题。
1.4 点云数据配准与标靶测量
在实际扫描测绘过程中,由于场地及扫描仪器设备本身视野的限制,往往需要进行多站点扫描多视角测量。扫描仪得到的点云数据是独立站点的仪器内部坐标系三维坐标,为了得到扫描对象整体三维点云模型,必须把不同站点扫描得到的点云数据通过坐标变换统一在一个坐标系中,即点云配准。点云配准是扫描数据获取后主要处理步骤,也是所有后续处理基础,配准精度将直接影响到所有成果精度。
设独立站点点云坐标为 Pi,统一点云坐标为 Pc,即转换 Pi→Pc为:

若需要得到外部绝对坐标系坐标 Pe,计算方法为:

其中 ΔPce为统一坐标系与外部绝对坐标系间的平移参数矢量,Rce为两坐标系间的旋转矩阵,此时只考虑了坐标系的旋转和平移。将统一坐标系的点云坐标 Pc转换到外部绝对坐标系坐标 Pe同样需要至少 2 个控制点才能完成。控制点使用标靶或扫描对象中的特征点,控制点的外部绝对坐标用全站仪或 GPS 测量的方法获得。
上述拼接精度依赖于连接点选取的准确程度。目前大部分仪器都可以使用专用标靶作为连接点标志,仪器自动对标靶进行高密度扫描,通过软件自动提取标靶中心坐标[1]。在诸如建设工程监理测量这样高精度测量中,仅仅单独使用特征点利用匹配算法拼接而不使用标靶是不适合的,其主要原因如下。
(1)激光扫描不同于单点测量,无法对某一点进行有目的扫描而精确获得其三维坐标。扫描时的点间隔一般为几毫米,同时由于激光束的发散使得扫描光斑在目标表面也不是一个点,无法使相邻测站扫描到同一个特征点。拼接时使用的并不是某个完全相同的特征点,所以拼接后会存在偏差。即式 1 中 与 并非同一点,因此由这些坐标确定出的参数(XS、YS、ZS、φ、ω、κ)必然存在偏差,由这些参数利用式1进行待拼接的点云坐标转换,其结果就会产生变形。
(2)使用标靶时可以通过软件自动提取标靶中心点坐标,而在点云中特征点需要人工识别,人工识别本身也会存在偏差。
此外,扫描时标靶放置的位置会影响拼接和坐标转换精度,像卫片和航片几何纠正中控制点的分布问题一样,标靶宜均匀分布于整个扫描范围或重叠范围,互相之间尽量远离并在三维空间中均匀分布。
2 房建工程施工监测
三维激光扫描仪具有精度高、速度快、操作便捷等特点,可方便应用于房建工程项目监测工作,如施工场地地形图检测、土石方填挖量复核、钢结构尺寸检测及古建筑修复施工监测等。
2.1 施工场地测量检测
在工程施工准备阶段,使用三维激光扫描测绘技术快速检测(或提供)施工场地地形图,整理计算所需填挖土石方数量。根据地形特点,合理设置外业扫描站点,完整获取场地点云数据。经过内业点云数据去噪、配准、补漏等,建立施工场地点云立体模型。依据施工控制网,将点云模型转换为施工坐标系场地三维立体模型。使用专业软件自动生成与施工地形图同比例尺的等高线(或等深线)图,用于施工地形图比较检测(如图 2 所示)。

图 2 三维立体模型与等高线图
以场地三维立体模型为基础,依据施工设计开挖面高程数据确定模型体积计算基准面,在设计红线范围内使用专业软件准确计算出填挖方体积(如图 3 所示)。
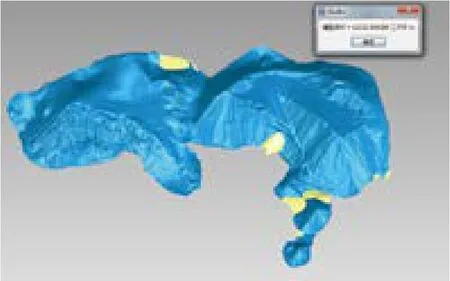
图 3 土石方量计算
2.2 钢结构部件成品检测与安装施工监测
在大型钢结构建筑施工中,为保证钢结构精确安装,首先必须对各个钢构件成品的生产精度进行检测,即与设计数据进行比对。利用传统测绘手段进行检测比较困难,特别是异形构件,而基于三维激光扫描的模型重构技术为其提供了较好的解决方案。
图 4 是某建设项目钢构件扫描模型与设计模型对比分析结果图。在该项目中,监理工程师使用三维激光扫描仪对特异型钢构件成品进行整体扫描,通过专业软件对扫描数据进行滤波、去噪、标定、拼接等操作,得到钢结构高精度点云模型,在模型上可直接对安装构件尺寸进行测量,检测精度可达到 3 mm。将点云模型和设计模型导入专业软件进行检测分析,经过匹配计算得到构件点云模型和设计模型之间的误差[2]。根据误差大小赋予不同的色彩,通过色谱图可以清晰看到各个位置的具体形变情况,从而确保钢构件成品外部尺寸精度。

图 4 构件的扫描模型与设计模型对比分析
图 5 是钢结构安装施工监测情况图。在钢结构建筑安装施工监理中,利用三维激光扫描技术检测接口安装精度和钢桁架安装施工拱曲度。利用点云数据以逆向工程手段构建钢结构三维 TIN 模型并拟合不规则曲面,采用曲面平移、交线拟合的方法获取指定取样点坐标数据。通过数据处理、计算,快速得到钢结构安装接口尺寸以及钢桁架安装施工拱曲度。将施工数据与设计数据比较,可以检测钢结构安装施工是否满足设计要求。

图 5 钢桁架安装施工监测
2.3 古建筑修复施工检测
在古建筑维修施工过程中,利用三维激光扫描测绘技术可以检测古建结构部位或整体施工精度,以及古建外墙面收分、施工平整度等。检测结构施工精度的方式有两种:第一种方式是先利用扫描点云生成施工建筑物正射影像,然后将设计图叠加在影像平面图上进行比对(如图 6所示)。这种方式有点类似摄影测量,但是由于影像没有透视畸变,因而在精度上要优于摄影测量。第二种方式是先扫描建筑物生成点云模型,做成点云切片,然后将点云切片导入 CAD 等软件中,将点云切片直接与设计 CAD 图进行比对(如图 7 所示)。采用这种方式需要注意控制点云切片的密度,理论上密度越大,精度越高,但是数据量增大将对计算机性能提出更高要求[3]。这两种方式比较而言,第一种方法的优势是生成正射影像后,图像纹理清晰,位置比对准确;但是影像内业处理耗时比较长。第二种方法的优势则简单快捷,适合古建筑平、立、剖面等结构实物与设计线划图比对;缺点是生成点云切片时必须处理好剖切点与看点之间的关系,需要具体操作人员具备一定的古建绘图知识。
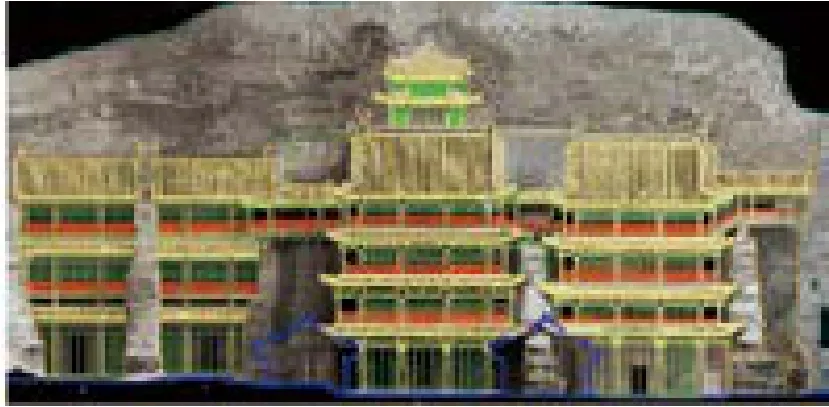
图 6 正射影像与线划套合图

图 7 点云切片图
图 8 是某古建筑外墙面平整度检测分析图。为了检测分析施工平整度及墙面收分情况,首先要建立参照立面(包括墙面点云平均立面和墙脚垂直立面),计算墙面点云到参照立面的距离,分析该墙面各部位施工平整度及各层收分情况。根据距离方向、大小赋予不同颜色,可以直观显示墙面各部位凸凹状况等。

图 8 古建筑外墙面平整度检测分析图
3 地铁隧道盾构施工监测
三维激光扫描技术和传统测绘技术相结合,能够在隧道施工或运维各个阶段采集和记录隧道三维几何形态及内壁的激光扫描正射影像;提供隧道超欠挖面积和土方量、周边收敛变形、调坡调线、平整度等多种分析成果;提供高密度、多信息采集方式替代常规测量检测手段等。
3.1 隧道断面检测
在地铁盾构区间施工中,隧道断面测量是隧道施工监测、竣工验收、质量控制等工作最常用的方法。采用传统测绘方法采集相关数据十分费事费力,往往只能采集少量局部特征点。采用三维激光扫描技术能够全方位、大量地对盾构区间整体数据进行采集;通过专业软件处理,可以快速得到隧道区间任意部位的纵横断面和掘进轴线三维坐标,从而对隧道进行整体变形分析、信息化指导施工等。
利用扫描仪采集隧道点云数据,根据处理后的扫描数据自动拟合出地铁隧道的中轴线。可以自定义间距生成隧道的断面图,并且导出断面文件[4]。横断面数据可清晰反映各个区域的变形量,方便分析和评估变形带来的安全隐患。隧道的断面数据可以生成专属报告,既可以用数字形式表现,也可以用图表反映出隧道的形变量值(如图 9 所示)。

图 9 隧道断面扫描测量成果图
在地铁站厅竣工检测中,在点云模型上沿高程方向对站厅层结构进行剖切,所得不同高度的剖面线直接导入设计图中,与设计边墙进行对比,可以进行任意几何要素的量测,从而得到施工现状与设计的偏差值。
3.2 盾构机掘进姿态监测
将现场扫描所提取断面中心点连线与相应设计隧道断面中心点连线相比对,可以得出隧道断面中心点施工数据与设计数据的三维坐标差值。根据偏差值大小,确定盾构机姿态能否满足设计要求。利用三维激光扫描结合控制测量的方式对盾构区间进行整体扫描,监测数据可以有效保证工程质量,提高施工安全系数。
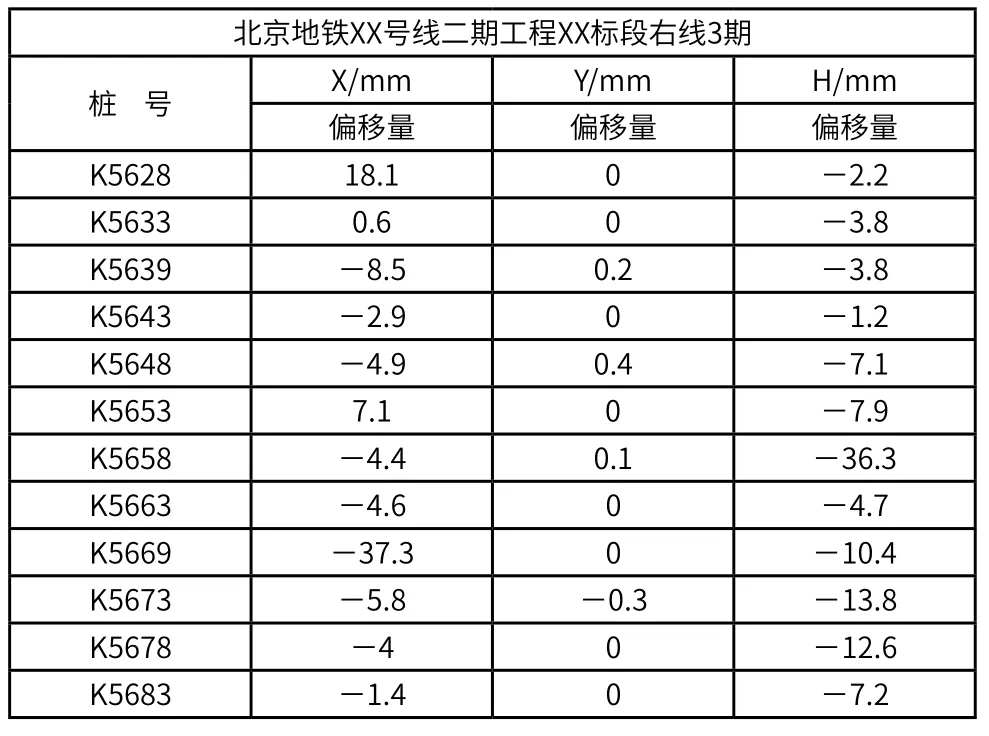
表 1 偏差值统计表
表 1 为北京地铁某号线一个标段某时期中心线整理后的偏差值统计表。从表中可以发现,有两个点位的偏差超过预警值(桩号 K5669 偏移量 37.3 mm,超过规定 50 mm 的70% 超过黄色预警值;桩号 K5658 高程向下偏移 36.3 mm,也超过黄色预警值),需要及时反馈给施工方,对盾构进行预防性纠偏处理,确保其盾构姿态正确。
3.3 隧道管壁安全检测
利用三维激光扫描点云建立隧道三维立体模型,使用高分辨率相机获取管壁表面影像,经纹理映射后制作管壁表面正射影像平面展开图。检查人员能够直观检查管壁渗水、裂纹等病害状况,检测计算管壁局部变形量等。
4 结 语
经过近几年的实际工程应用和测试探索,地面三维激光扫描测绘技术从外业数据采集、内业点云数据处理,到具体成果应用等方面有了一定进展。但是,在建设工程监测领域中,大规模系统应用的案例较少,应用技术尚不成熟。随着应用工程的增多和技术经验及仪器设备的进一步完善,三维激光扫描技术在工程建设领域中将被更广泛地推广,发挥着越来越大的作用。
