基于水动力学与虚拟现实的深水水下应急维修仿真系统
2019-01-24毛东风孙成功张来斌李志刚
毛东风, 余 阳, 孙成功, 左 信, 张来斌, 李志刚
(1.中国石油大学(北京)国家安全生产监督管理总局油气安全工程技术研究中心,北京 102249; 2.海洋工程股份有限公司,天津 300451)
深水油气开发远离陆地,环境相对孤立。一旦事故发生,应急维修活动将因水面设施空间狭小而受到极大限制。处置不当,可能造成灾难性的后果。发生于墨西哥湾的“深水地平线”事故教训惨痛[1],使深水油气事故的应急处置成为全球关注的焦点。快速高效的应急维修成为现阶段海上油气安全生产的重要发展战略[2]。为了最大限度减少人员伤亡和财产损失,让救援人员体验事故环境并接受训练以提高救援效率是非常重要的。然而,重建真实深水环境的全方位处置训练,需要巨大的经济开支,训练过程甚至可能造成人员损失。目前突破传统发展的虚拟现实(virtual reality, VR)技术使人机交互成为可能,可使真实用户参与到计算机所模仿的虚拟世界中,而且在安全、方便、低成本、低风险、可重复安排训练等方面优势突出[3]。笔者研发出的深水水下应急维修仿真系统为深水油气开发与应急维修作业提供演练和试验的数字平台,有利于协助领导决策、完善海洋石油事故应对机制。
1 系统设计
1.1 相关研究
虚拟现实技术广泛应用在航空航天、船舶驾驶、军事演习等领域。近几年开始应用于深水油气工程。Hydro公司通过在ABB公司为其构建的虚拟安装仿真系统中的演练,成功完成大型水下管汇的下放安装。美国SAIPEM于2013年开发了水下机器人ROV虚拟仿真系统,用于操作人员的培训。因为用于海洋油气工程实践,这些仿真系统除了满足一般的物理关系,还必须符合水动力学关系。
随着三维水动力理论的日臻完善, 世界上主要船级社和一些重要院所相继开发了水动力分析软件。如基于三维线性零航速频域理论由DnV开发的SESAM/WADAM,MIT的WAMIT,美国Ultramarine的MOSES等。基于三维线性低航速频域理论的法国船级社的Hydro Star,基于三维非线性全航速时域理论由DnV开发的SESAM/WASIM, MIT的SWAN, 美国海军的LAMP及美国船级社的NLOAD3D等。尽管这些有限元软件可以很好地模拟海洋结构物的水动力响应,但是尚不能直接用于三维的虚拟现实渲染。加拿大CM-LABS公司开发的多体动力学虚拟仿真平台Vortex可以实现运动和环境仿真并VR渲染。但是其对大型船体或船-缆-体复杂系统的水动力仿真精度稍显不足。解决船-缆-体运动的实时解算与渲染是本仿真系统建立的关键。
1.2 系统架构
深水水下应急维修仿真系统的建立基于对维修方法的研究[4-5]。任何水下生产设施(采油树、管道/立管、管汇、跨接管、连接器等)的维修都是一个复杂的过程,往往需要通过作业船上的吊机/绞车、ROV(水下机器人)甚至ADS(单人潜器)HOV(载人潜器)等协同操作才能完成。因此所研发系统是一个面向超大规模、复杂场景的、多节点的虚拟现实系统。它通过虚拟现实引擎将三维虚拟现实模型与逻辑接合对虚拟世界进行控制,完成给定的任务。接口模块使虚拟世界参与者与VR引擎互动从而实现既定目标。系统逻辑架构如图1所示。
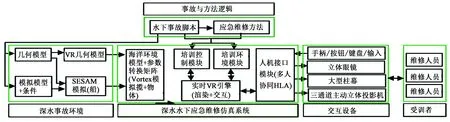
图1 深水水下应急维修仿真系统逻辑架构Fig.1 Logical framework of under-deepwater emergency maintenance simulation system
①事故与方法逻辑由水下事故情况(包括类型、海洋环境状况和救援与维修设施资源)、正确应对方法和标准操作规程构成;②环境资源包括基本的静态VR几何模型(船、缆、ROV、维修机具、吊机、绞车、水下设施及海洋环境等)及水动力有限元计算时需要的资源;③人机交互设备将最大可能地体现真实性和沉浸感。受训者的意图通过输入设备(与真实施工船上吊机和绞车及ROV等相同的物理操作台上的操纵杆、按钮、踏板或键盘等)获得,身临其境的可视化图形内容则由多通道主动立体投影机+大型屏幕+立体眼镜提供;④“深水水下仿真系统”将“深水事故环境”模型和数据中生成的虚拟“海洋环境”通过人机接口模块与用户交互时,由实时VR引擎运行,并受培训与评估模块控制,记录和监督整个培训过程。
1.3 系统软件架构设计
系统软件架构见图2,由10个模块构成。各模块功能是系统逻辑架构的软体实现。在设备模型管理模块的模型库中存放三维模型,行为库存放模型的基本动作,分布式场景需要确定可分享的结点和静态的结点。根据知识描述模块传递的知识选择加载/删除模型等功能对显示场景区域进行选择,同时设置场景中模型的更新回调,实现符合要求的场景动态效果。虚拟现实模块使用VR软件渲染三维场景呈现于大荧幕,用立体音效插件实现听觉的立体音响播放,并通过硬件设备对整个场景进行漫游。数据接收模块将从实时数据库获得的数据通过协同发送到知识描述模块,保证相近时刻产生的数据在接收时于时间上不会产生大的误差。过程知识描述将虚拟仿真维修中的操作流程分解为若干的操作步骤,而每一个操作步骤又分为若干个动作元素,此即脚本。控制知识描述则是对操作环节(判断属于哪一个训练过程)、操作有效性判别和逻辑关系规则的因果控制。教练员确定过程的各个环节的操作,制定评分标准,并将这些信息存入数据库中。系统运行管理可以创建/退出联邦、站点监控、用户管理和退出系统。通过科目设置添加、修改和删除仿真训练科目。通过启动仿真、场景暂停、场景重置、场景重演和数据存取对场景实施控制,还可对故障类型及作业环境(大气及海洋)、生产系统和工机具进行参数设置。考评模块将受训者操作数据转化,与考评知识库中知识规则对比,由推理机判断操作数据的准确程度给出考评结果,发送到客户端显示。教练员输入模块由教练员通过自然语言的形式确定维修过程每一个环节的操作,并制定评分标准;这些信息将存入数据库中。培训、考核人员输入模块包括ROV,ADS以及吊机和绞车等输入的接口。实时计算模块用于水下动力学数据的实时计算,并把计算结果传递到视景仿真模块。
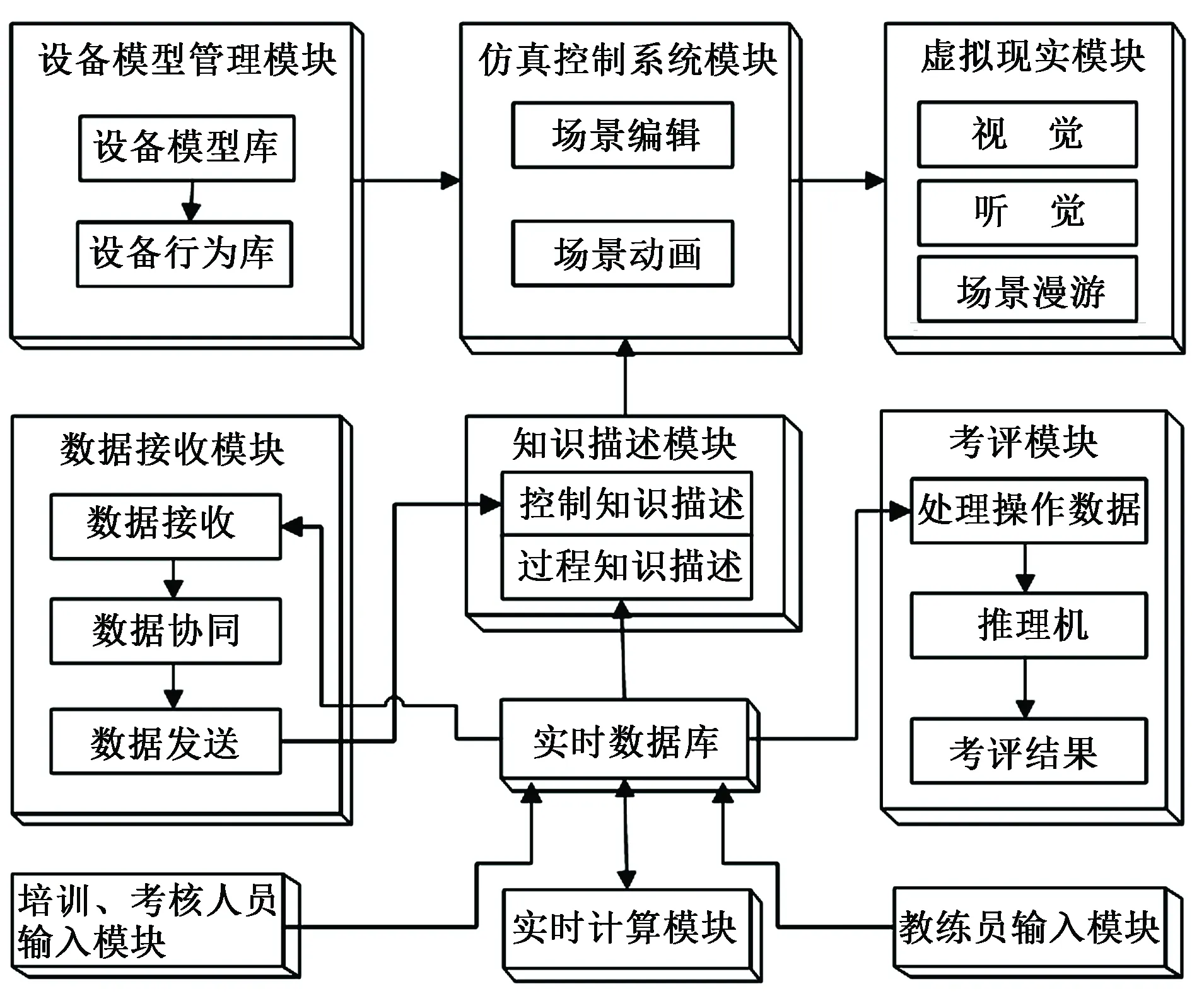
图2 应急维修半物理仿真系统软件模块Fig.2 Software modules of emergency maintenance simulation system
2 实 施
2.1 系统软硬件开发环境
表1为仿真系统的软硬件开发环境。能够进行精细地建模并支持实时解算与渲染。由于系统的复杂性,虚拟场景并发访问数多,客户端虚拟程序实时绘制的数据超量聚合,包括大面积的海洋及波浪以及船和各种维修机具与水下设施等的数据及基础地理数据,因此需要采用多层次逻辑架构设计,在网络体系上采用多台服务器的分布式架构实现。
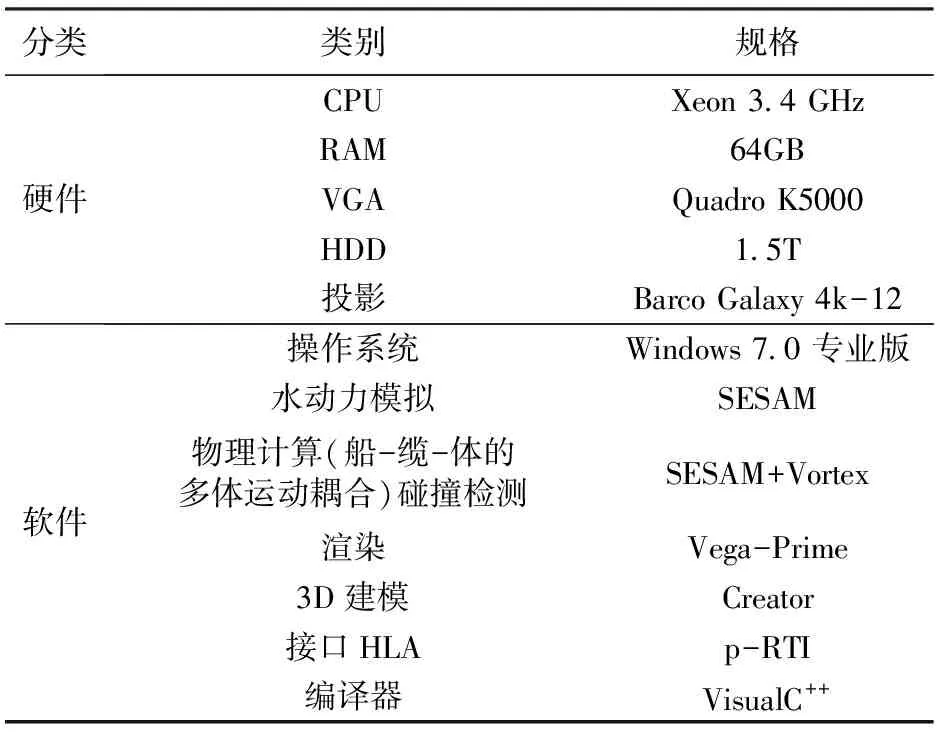
表1 软硬件开发环境
2.2 系统接口开发
培训演练在教练员设定的虚拟环境中进行,由各操作员操作物理的控制器,如吊机/绞车/ROV操作台,发出操作指令,通过接口将操作数据传输到解算服务器和渲染服务器。解算器解算出模型所需的参数由接口传递至视景生成器生成所需的场景,如水面生产系统子场景、水下生产系统子场景、设备下放与回收子场景、水下维修作业子场景等。主场景通过HLA获取运动仿真数据,实时更新模型状态,并且实现碰撞检测等动力学效果。仿真运行的每一帧画面,通过投影机实时投影于环幕,操作员通过监视器或大屏幕反馈的信息调节操作,形成闭环系统。各用户和软硬件接口所传输的操控数据遵循OPC协议,场景数据则遵循HLA协议。在各作业子场景中,将动力学计算节点设计为局部协调者节点,中央控制节点通过Vortex_RTI中间件对各部分协调管理,实现物理仿真引擎与视景仿真引擎之间的交互,实时驱动视景仿真推进,即联邦成员(操作员站和教练员站)之间可以实时发布和更新仿真数据(如模型的位置和姿态),实现ROV、吊机、绞车子系统与主解算服务器的仿真场景同步,保证整个仿真系统的时空一致性,使仿真系统实现多人协同操作。图3为系统软硬件逻辑与物理连接关系。
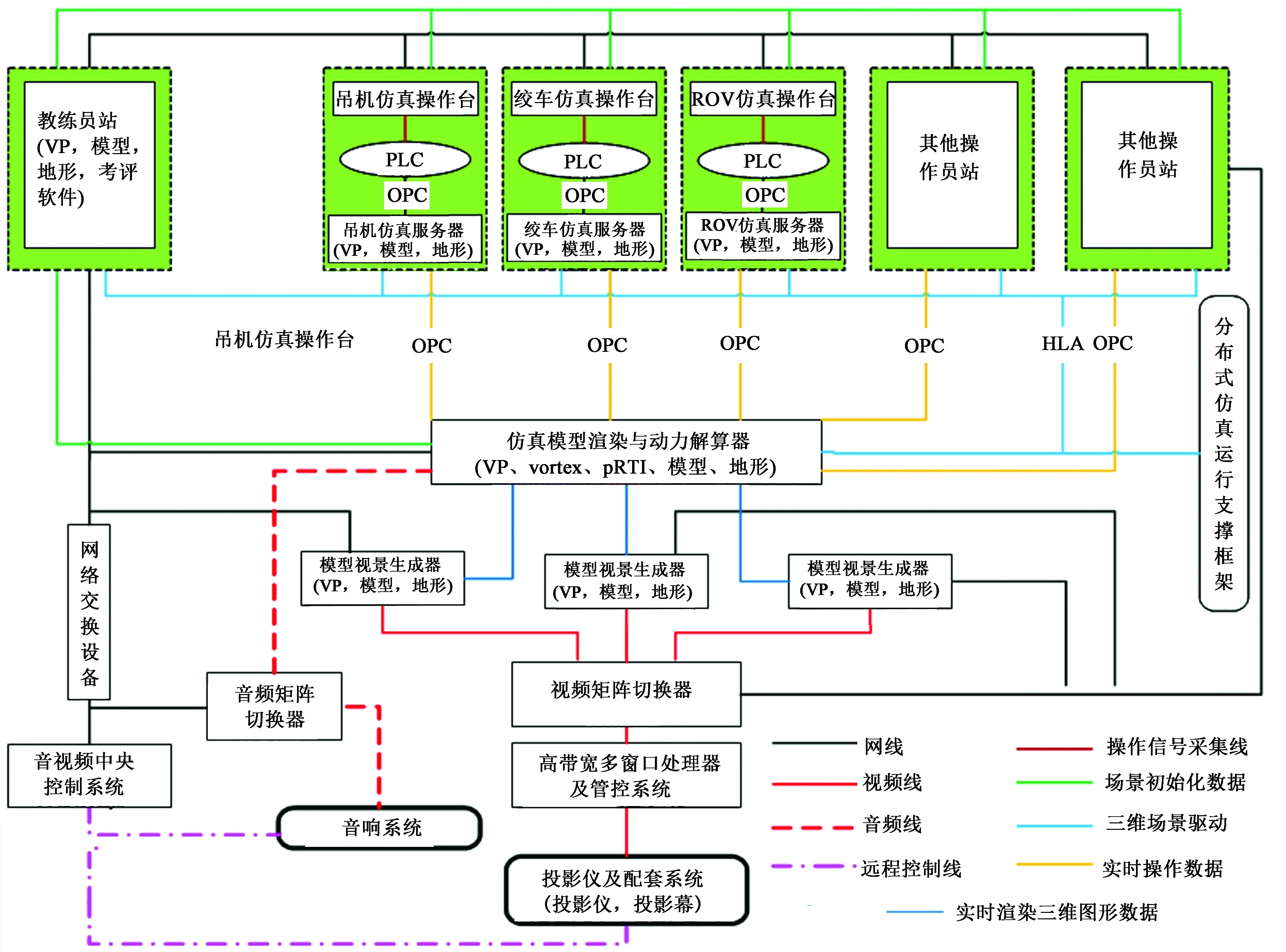
图3 系统软硬件逻辑与物理连接关系Fig.3 System logic of software and hardware and physical connection
2.3 满足仿真实时性和真实性的解决方案
本系统需要充分模拟海洋动力学特性,以获取尽可能接近真实的应急维修过程设备的动态响应特性和三维视景。必须注意:①海流的多向性;②船-缆-体的多体运动耦合,这里“船”指船上的吊机、绞车等设备在船体运动输入下的响应,“缆”包括吊索、脐带缆、钻杆等,“体”指水下的设备、载具、机具等;③带缆结构物运动的强非线性。
离线的SESAM有限元分析和Vortex水动力虚拟仿真平台分别在真实性与实时性上各具优势。为满足系统对仿真实时性与真实性的要求,提出将有限元计算与虚拟现实实时运动仿真有机结合的解决方案[6],即将SESAM有限元离线计算的船体六自由度运动响应[7-8],通过矩阵变换作为缆绳吊点的边界输入,在Vortex中实时求解船-缆-体多体动力学模型,并将结果输送给VP进行场景绘制。而有限元分析得到的船的运动参数直接传递给VP渲染出其运动(图4)。结果经第三方验证,系统延时性最高为288 ms,系统运动误差最高为9.7%[9-10]。说明本文中提出的方案成功满足实时性和真实性的要求。
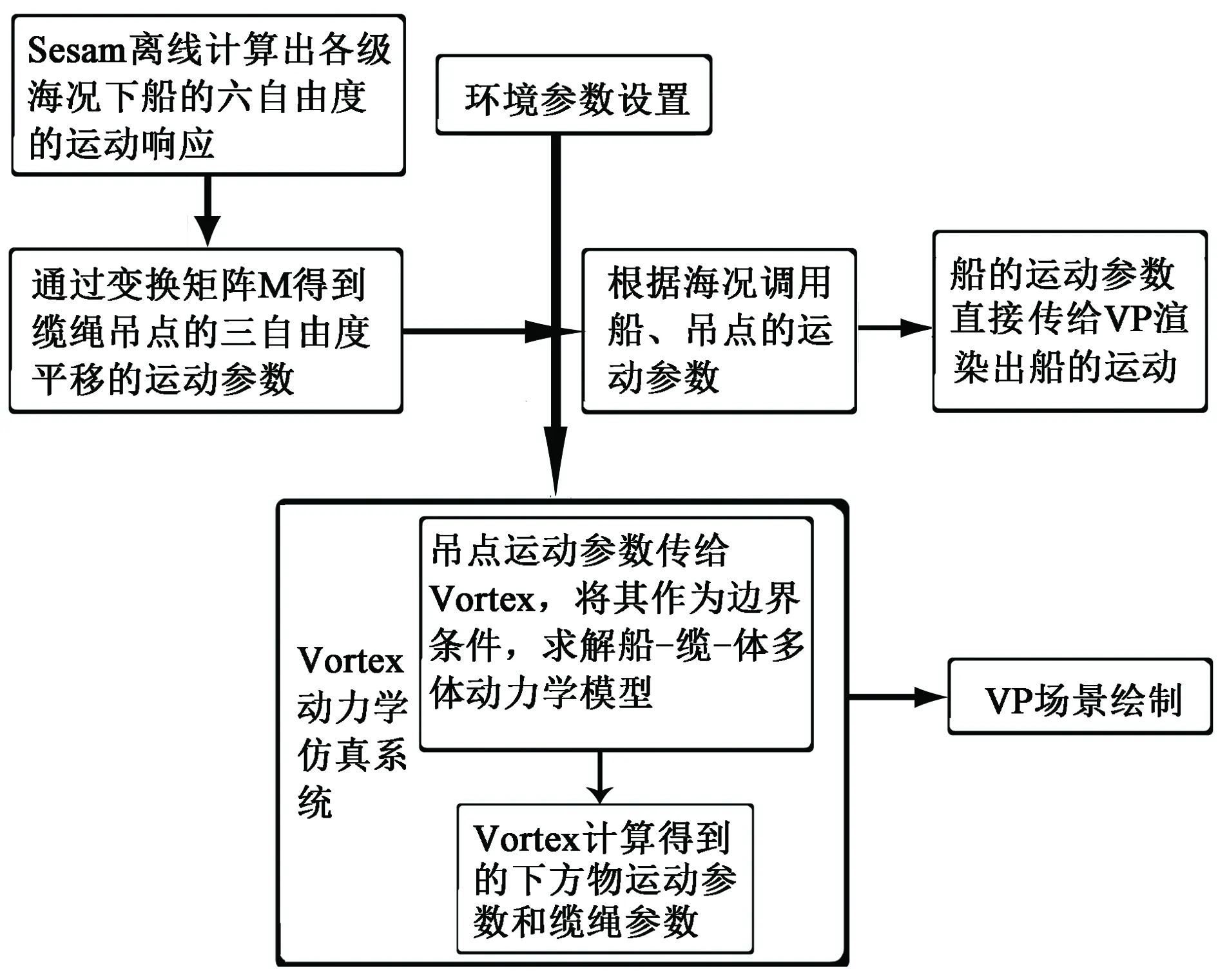
图4 虚拟仿真实时性和真实性的解决方案Fig.4 Scheme of real time and authenticity of virtual simulation
本系统仿真的真实性还体现在下放物体入水时水花的粒子动力学仿真、缆绳的动力学仿真、抓取和虚拟装配等方面。缆绳仿真是VR技术中的难点,目前对缆绳仿真采用多个分段刚体拼接而成。为了优化ROV脐带缆、吊机缆绳等的仿真效果,在Vortex中将缆绳作为柔性体,单元之间以球绞连接并施加弹簧-阻尼力等属性,实现缆的柔性(图5)。
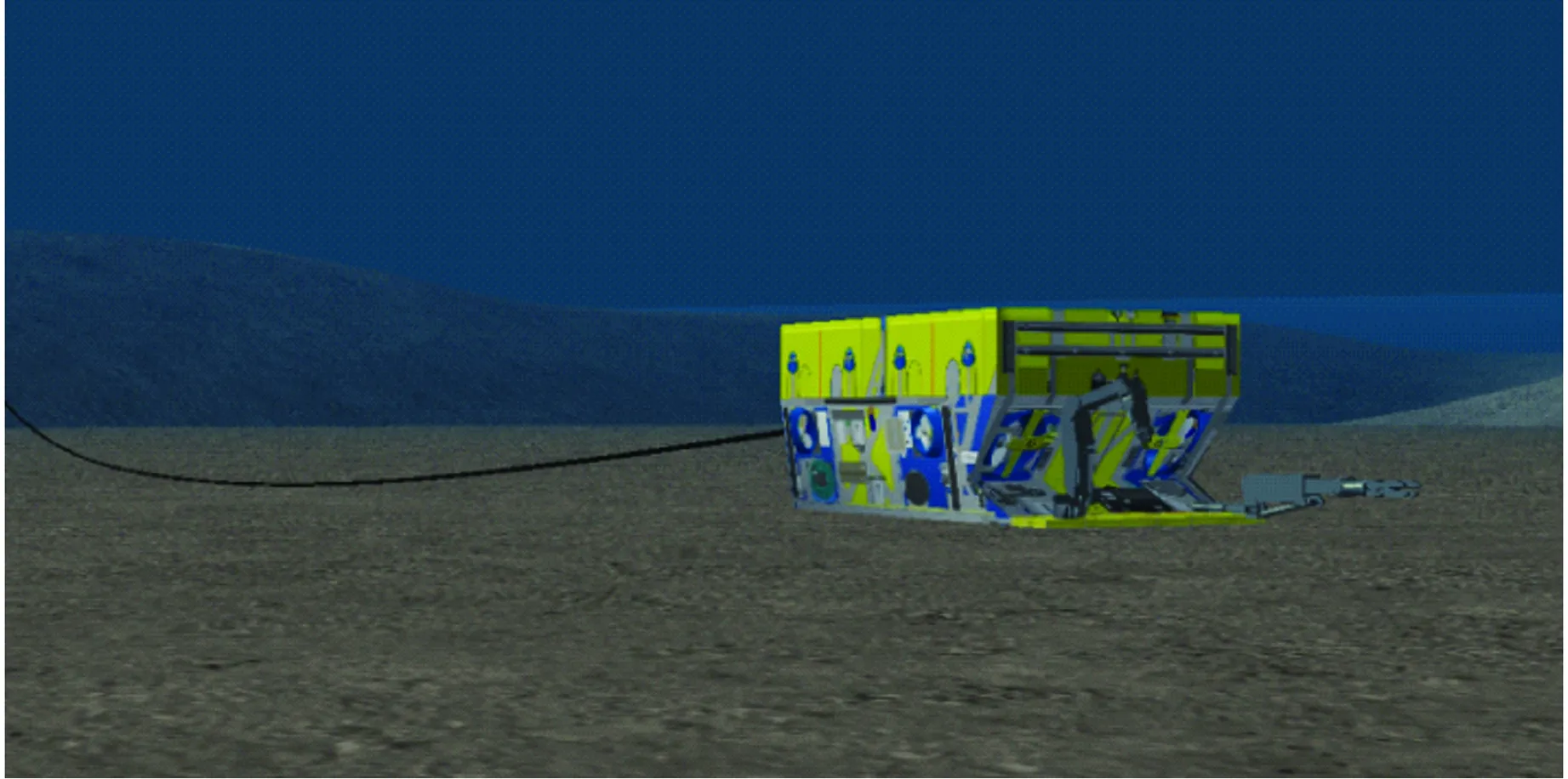
图5 ROV脐带缆动力学仿真效果Fig.5 Dynamic simulation effect of ROV umbilical
2.4 吊机与绞车仿真操控台研发
吊机与绞车仿真操控台依照HYSY-281船配套吊机与绞车开发。控制台外观与实际一致,内部控制装置与模拟量/数字量输入输出模块等相连,并通过这些模块分别与操作台手柄、开关组、按钮组、指示灯组等相连。操作台上所有的操作元件触发后产生的电信号通过信号采集系统既内部PLC系统,传输给仿真控制层和数据服务层进行处理,经过系统解算服务器和视景服务器处理之后反馈给人机交互层的显示装置,并且将与学员培训考核相关的数据记录到数据库服务器中,供考评或以后调用(图6)。

图6 系统广角实拍Fig.6 System wide angle picture
教练员站上的考评系统可以对操作员的操作进行主客观打分评价,主客观因素以权重分配加以调节。
3 典型案例仿真实现
各种典型案例的仿真通过在应急维修方法基础上制定的仿真脚本逐步编程实现。脚本内容应涵盖:①主场景配置,事故地点、水深、作业工况、事故描述、所需工机具等;②仿真模型构建,场景中水下生产系统各模型,维修载具、工具模型等,设置相应的碰撞检测和运动约束关系;③根据维修方法制定维修流程,细化为较大的维修操作过程和详细的操作步骤,并设定每一步骤的操作参数。以海底管道泄漏法兰连接修复的典型案例为例,整个过程分为7个维修操作过程及66个操作步骤。7个维修过程包括:①ROV关闭生产阀;②下放提管架并提升管道;③切除管道;④下放安装机械连接器;⑤预制新管段并安装;⑥开启生产阀;⑦回收提管架。
目前所建系统包含了一套水下生产系统模型库以及相关下放、安装和维修所需载具与工机具模型库,可以实现水下采油树密封圈的更换(图7)、海底管道泄漏法兰连接修复、水下生产系统(管汇/PLET/PLEM/采油树/飞线)的下放安装、吊机/绞车/ROV操作等案例的仿真操作培训与演练(图8)。由于具有良好的可扩展性,可以将其他典型案例或新的联邦成员(新的操作员系统)接入,包括近端与远端的,也可以并入更大型、更高级别的应急指挥救援体系。
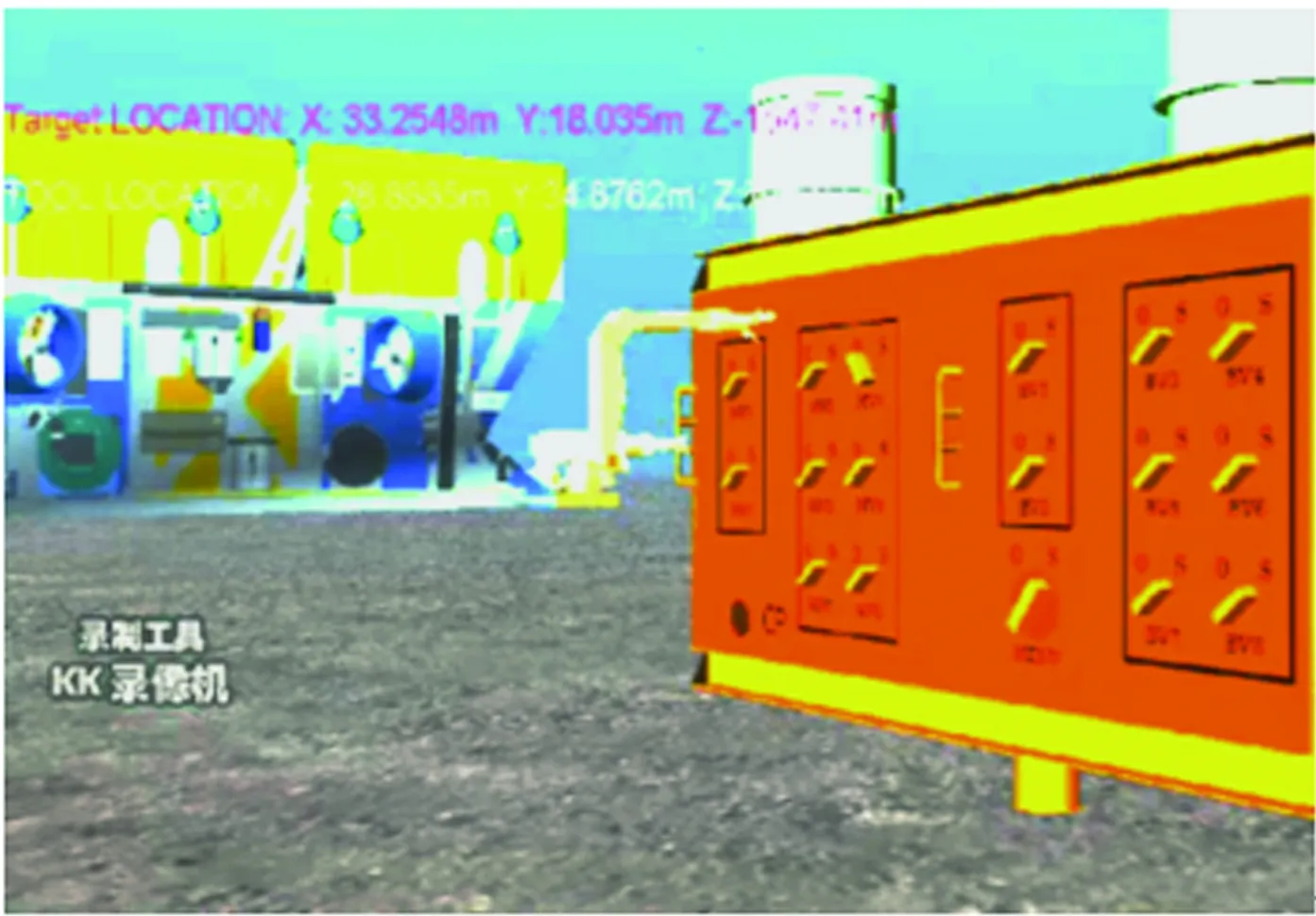
图7 水下采油树维修时ROV操作控制面板(系统截图)Fig.7 ROV operating control panel during maintenance of underwater tree(system screenshot)

图8 海底管道泄漏法兰连接修复时吊机与ROV协同操作Fig.8 Synergetic operation of crane and ROV during flange connection repair of leaked submarine pipeline
4 结束语
通过对超大型复杂场景多人协同作业人机交互分布式仿真系统建立所需要的系统架构研究、软硬件平台开发、数据接口技术研究,提出基于水动力学的满足仿真实时性和真实性的解决方案,建立了目前中国最大的深水水下应急维修半物理仿真基地,很好地
处理了大型系统的多人协同实时人机交互、海洋环境下船-缆-体的动力耦合作用及可视化实现、不同数据通讯接口技术等关键问题。整个系统具有强烈的立体感、真实感和身临其境的沉浸感以及良好的可扩展性。通过第三方验证,系统仿真精度控制在9.7%以内。可以用于工程人员的操作培训与考核及对拟定维修方案进行演练,协助领导决策。为高效、低成本、低风险开展水上应急维修提供安全保障。
