竖向人-结构相互作用体系理论模型研究
2019-01-23李寿涛张芝芳徐梅玲
李寿涛, 任 珉, 张芝芳, 徐梅玲
(1.广州大学-淡江大学工程结构灾害与控制联合研究中心,广州 510006;2.湖北正天工程咨询有限公司,湖北 宜昌 443000)
随着工程中柔性结构的增多和新材料的应用,特别是在高人群密度的大跨或柔性建筑结构中,考虑人体对于结构的影响十分重要,因此这方面的研究成为了当下研究热点[1]。早期,在结构工程中,人体(人群)被简化为附加质量作用于结构上,后来在测试过程中发现人体还会改变结构的阻尼,于是将人体(人群)作为具有动力性能的模型来考虑,提出了质量-弹簧-阻尼人体模型用于研究人-结构相互作用体系的动力特性。Ji等[2-3]根据Twickenham露天体育场馆看台测试结果,并基于对人在振动环境中的研究,提出了附加质量器的单自由度质量-弹簧-阻尼人体模型与单自由度结构相互作用的两自由度人-结构体系,如图1(a)所示。Sachse等[4]将人群简化为单自由度质量-弹簧-阻尼模型,并与结构组成两自由度(2DOF)人-结构相互作用体系进行模态参数分析,如图1(b)所示。Shahabpoor等[5]将行走人体简化为单自由度模型作用于结构,分析了该体系的动力特性。Zhou等[6]采用两种方法构建人-结构相互作用的两自由度模型,一种为分离建模,将人体和结构分别建为单自由度系统再物理结合;另一种方法将人体和结构视为一个相互耦合,不可分割的整体进行建模;结果表明综合建模较分离建模更合理。然而,在人-结构相互作用体系研究中,将人体模拟为单自由度模型将忽略人体的高阶振型影响,因此有必要将人体模拟为两自由度以上的模型。Griffin等[7]通过对坐姿人体的表观质量试验结果进行理论和数值分析后,提出了2种单自由度人体模型和4种两自由度人体模型,且通过实验比较发现两自由度模型能更好地模拟人体的频率和相位,如图2所示,其中图2(a)和(b)为串联两自由度模型,分别不考虑附加质量和考虑具有附加质量,而图2(c)和(d)则为并联两自由度模型。Griffin等研究表明不考虑附加质量的两自由度质量-弹簧-阻尼模型比考虑附加质量的模型更适合用于描述人体动力特性。

(a) 两自由度附加质量器模型(b) 两自由度模型

图1 两自由度人-结构体系模型
图2 两自由度人体模型
Fig.2 Two-degree-of-freedom mannequin
国内也有学者开展了相关研究。王海等[8]针对通过分布双自由度模型研究了人-梁的耦合作用。韩慧璇等[9]采用能量法研究静立人群与板联合系统的动力学特性,对人-板系统的动力学特征进行分析。王益鹤等[10]建立了步行过程中人与结构相互作用的系统运动方程,研究人与结构的相互作用及动力响应。张琼等[11]建立以行人步频和体重表示的刚度-质量-阻尼模型,用于分析考虑人-桥竖向动力相互作用和只在人行荷载作用下人行桥的动力响应。陈建英等[12]提出了人体简化为考虑附加质量块的单自由度质量-弹簧-阻尼体系,得到单人、多人作用于人-简支梁相互作用体系的响应情况。谢伟平等[13]将人体简化为弹簧-质量-阻尼单自由度系统,分析人/结构质量比和结构频率等因素对行人足底反力的影响,进而揭示人-桥相互作用的影响因素及变化规律。简方梁等[14]将人体当做荷载激励作用于上海虹桥站人行走廊的有限元(ANSYS)建模上,对结构振动的舒适性进行评价。朱前坤等[15]建立人体单自由度动力响应数学模型以研究考虑人-楼梯相互作用时,大跨度柔性楼梯在人行激励作用下的振动舒适度。韩小雷等[16]采用有限元软件建立楼板模型,施加多个行人荷载得到楼板的加速度反应谱,以评估建筑楼板的舒适性。张高明[17]研究单人和人群荷载作用于广州火车站站房候车大厅时,通过采用振级法判断楼板结构的舒适度。综上可知,国内关于人-结构相互作用的研究,更多侧重于确定体系的动力特性和结构的舒适度,而基础的理论模型研究相对较少,且大多采用单自由度人体模型进行研究。
本文主要依据Griffin等提出的不考虑附加质量块的串联、并联两自由度人体模型,结合单自由度结构以组成三自由度人-结构相互作用体系理论模型,研究人-结构相互作用体系的共振频率,并利用试验结果对人体模型参数进行优化,使模型更贴近实际情况。
1 三自由度人-结构体系理论模型
从人体生物动力学的研究中发现:无论人体处于坐姿或站立的状态下,两自由度模型均比单自由度模型更能有效模拟人体的动力特性[18]。基于这一结论,本文结合Griffin等提出的人体串联、并联两自由度模型以及单自由度结构模型,组合得到了三自由度人-结构相互作用体系,如图3所示。其中图3(a)表示串联两自由度的人体模型与单自由度结构模型组合,用2a_s表示,图3(b)则表示为并联的两自由度人体模型与单自由度结构模型组合,用2c_s表示。图中,M1、M2分别表示人体的模态质量,K1、K2分别表示人体的模态刚度,C1、C2分别表示人体的模态阻尼,Ms、Ks、Cs分别表示结构模型的模态质量、模态刚度、模态阻尼,S为安装于结构模型上的拾振器,F为施加在结构模型上的作用力。
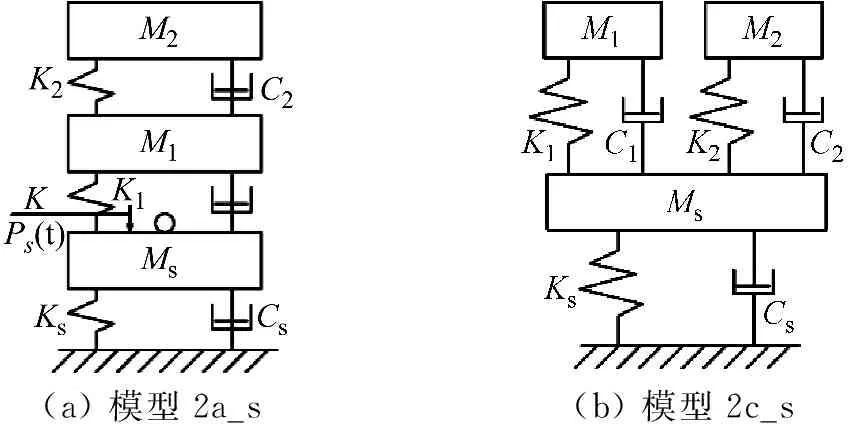
(a) 模型2a_s(b) 模型2c_s
图3 三自由度人-结构相互作用模型
Fig.3 3DOF human-structure model
1.1 由串联两自由度人体模型构成的人-结构体系理论模型(模型2a_s)

(1)
根据Ji团队对2DOF的推导方法[20],得到加速度频响函数
(2)
其模为:
(3)
其中:
并有:
1.2 由并联两自由度人体模型构成的人-结构体系理论模型(模型2c_s)
将人体简化为并联两自由度模型,并与单自由度结构模型组成三自由度质量-弹簧-阻尼体系模型。根据结构动力学,该模型在简谐荷载作用下的运动方程如式(4)所示,采用类似模型2a_s的方法推导得到结构响应频率函数如式(5)所示
(4)
傅里叶变换后加速度频响函数为
(5)
其中有
(5a)
(5b)
4(ξ1β1α1+ξS)ξ2β2+4(ξ2β2α2+ξS)ξ1β1]
(5c)
(5d)
模型2a_s和模型2c_s推导得到的结构响应加速度频响函数中其对应参数表示的物理意义是一致的。而不同之处在于人体模型自由度的连接方式不同,所以两模型运动微分方程中的模态质量矩阵、模态刚度矩阵、模态阻尼矩阵是不同的。
2 模型验证
2.1 简化的三自由度人-结构模型与两自由度模型对比
基于三自由度的人-结构体系模型中,若将两自由度人体模型去掉一个自由度,则可简化为与Ji研究中一致的两自由度人-结构体系模型[21]。将两模型理论推导结果(式(2)、式(5))进行化简得到式(6),并将其与已有文献结果对比发现完全一致。同时在MATLAB中运算3DOF人-结构体系结构加速度频响函数(式(2)、式(4)),当其参数取值与2DOF相同时(两自由度人体模型中对应的一个自由度参数取为零),发现两曲线完全重合,以此初步验证了理论推导的准确性。

(6)
2.2 验证基频的计算结果
由图3(a)知,若不考虑模型2a_s阻尼的影响,则该模型与结构动力学中三自由度层剪切结构类似。于是,根据结构动力学中三自由度自由振动方程,采用MATLAB中特征向量、特征解的函数EIG计算模型的圆频率。其中将质量取为:M1=1.60×105,M2=34.44,M3=23.64,刚度取为:K1=7.80×106,K2=2.64×104,K3=3.32×104,代入公式|K-ω2M|=0,通过MATLAB编程计算结构固有圆频率为:0.90 rad/s、34.94 rad/s、93.79 rad/s。在模型2a_s中,阻尼取为:Cs=0,C1=0,C2=0;质量Ms,M1,M2和前述M1,M2,M3取值一致,刚度Ks,K1,K2和前述K1,K2,K3取值一致;代入式(2)中绘制函数曲线图,并判断其极大值,由此得到体系共振的圆频率为:0.90 rad/s、34.94 rad/s、93.79 rad/s。两种不同方式所计算的结果基本无误差,因此认为采用功率谱的方法推导得到的体系共振频率公式是正确的。
3 模型参数优化
利用模型2c_s 模拟已有的试验结果,其中人体模型采用的是Griffin等提出的竖向两自由度模型参数,根据模型2c_s中结构加速度频响函数(式(5))计算得到质量比α=0.54,阻尼比为ξ1=0.43,ξ2=0.35,圆频率ω1=82.88 rad/s、ω2=36.63 rad/s,频率比β1=4.58,β2=2.04(结构固有频率为2.88 Hz),单人站立时有α1=0.138,四人时有α1=0.525。对比图4与图5可知,试验测试单人站立于平台时(图4(a)),体系共振频率为2.46 Hz,略低于原结构频率2.88 Hz;四人站立于平台时(图4(b)),体系共振频率出现了两个,分别为1.92 Hz、7.65 Hz;采用模型2c_s模拟的结果中,在0~15 Hz频率段内,单人站立于平台时共振频率为8.237 Hz,四人站立于平台时的共振频率为9.97 Hz,而且模型2c_s模拟图与试验结果中收敛情况相悖。因此,认为该模型中采用Griffin人体模型参数模拟人-结构相互作用体系是不合理的。

(a) 单人站立于平台

(b) 四人站立于平台
针对Griffin人体模型参数不合理这一情况,提出采用单纯形法(Nelder-Mead Simplex Method)优化计算竖向人-结构相互作用体系中的人体参数,4个优化参数分别如下:人体两自由度的比值α=M1/M2、人体模型中自由度m1所占人体总模态质量的比值α1=M1/MH、两自由度人体模型的阻尼比为ξ1、ξ2。由于单纯形法为无边界条件的优化方法,需设定参数优化时合理的边界条件,使得优化结果有物理意义。查阅相关文献可知[22],两自由度人体模型的质量比α的合理取值范围在0.5~2;自由度m1占总模态质量的比值α1应为小于1的正值;依据文献[23-24],人体的阻尼比的合理范围在20%~50%。据此,设定四个人体模型参数的优化范围为:α∈(0.5,2)、α1∈(0,1)、ξ1∈(0.2,0.5)、ξ2∈(0.2,0.5)。优化目标定义为理论计算与试验结果的偏差平方和△(式(7)所示),在MATLAB中使用函数fminsearch进行优化计算。

(a) 单人站立于平台(Griffin)

(b) 四人站立于平台(Griffin)
(7)
优化后,竖直站立人体串联模型2a_s的相应人体参数为:α=1.932,α1=0.041,ξ1=0.218,ξ2=0.381;竖直站立人体并联模型2c_s的人体参数为:α=0.930,α1=0.051,ξ1=0.335,ξ2=0.421;弯膝站姿人体串联模型2a_s的相应人体参数为:α=1.743,α1=0.343,ξ1=0.205,ξ2=0.200;弯膝站姿人体并联模型2c_s的相应人体参数为:α=1.774,α1=0.006,ξ1=0.426,ξ2=0.233。所有优化后得到的参数均落在文献中指明的合理范围。
人体静止竖向站立的前两阶频率约为5.50 Hz、12.00 Hz,因此,根据四个优化参数得到两自由度人体模型的模态质量M1=α1MH、M2=α1MH/α,模态刚度K1=(2πf1)2M1、K2=(2πf2)2M2,模态阻尼C1=2ω1M1ξ1、C2=2ω2M2ξ2,如表1和表2所示。

表1 优化后站姿人体模型参数

表2 优化后弯膝站姿人体模型参数
图6各线由上到下分别表示直接将Griffin文中参数分别用于当前2a_s和2c_s模型得到的结果同Griffin文中试验结果比较后得到的偏差;以及采用优化参数得到的2a_s和2c_s模型的结果同Griffin文中试验结果之间的偏差。由图可知,相比于采用Griffin等提出的参数计算结果,参数优化后的模型2a_s的模拟结果和试验结果偏差值平方和明显更低,因此可以实现通过参数优化来显著改善模拟结果。
4 结 论
将串联和并联的两自由度人体模型分别作用于单自由度结构模型,得到三自由度人-结构相互作用体系模型(模型2a_s、模型2c_s),并利用人体的高阻尼特性,分析系统的受迫振动运动方程,通过加速度响应函数分析系统共振频率,并对试验结果进行模拟,同时采用单纯形法对人体的两自由度模型进行参数优化,分别模拟了竖向站立、弯膝站立人体-结构体系试验结果,并得到每组模拟结果与试验结果的偏差平方和。
结论如下:
(1) 在人-结构相互作用体系的研究中,Griffin等的人体模型参数无法直接用于模拟试验测得的共振频率。

(a) 共振频率偏差值平方和(竖直站立)

(b) 共振频率偏差值平方和(弯膝站立)
(2) 针对模型2a_s、模型2c_s模拟人-结构相互作用体系,采用单纯形法优化人-结构相互作用体系的参数,得到两模型中的人体参数,验证了竖向人-结构相互作用体系的试验结果。
(3) 通过对比分析使用优化参数后模型2a_s和2c_s模拟试验结果的情况,发现模型2a_s能更好地模拟人体弯膝站姿、竖直站姿作用于结构时体系的动力响应情况。
由此可知,对人体模型参数优化后的理论模型能较好模拟试验结果,且人体为串联两自由度模型组成的三自由度体系(模型2a_s)能更好的模拟竖直站立、弯膝站立的人-结构体系的动力响应特性。
