一种适应于大负载工况的高线性度数字化比例电磁阀*
2019-01-22汪旭东王代华
张 榛,汪旭东,王代华,梁 亮,潘 斌,张 良
0 引 言
变推力液体火箭发动机可以为航天器的推进与控制提供可控动力,是航天器动力系统的理想选择,在软着陆系统、无拖曳系统以及电推进氙气贮供系统中均得到了应用[1-3].其中,流量调节技术是变推力发动机的核心技术之一,是变推力发动机研究的热点和难点.
工业领域中,可以实现比例控制输出的流量调节阀主要有电液伺服阀、比例电磁阀和电机阀.其中,电液伺服阀虽然具有精度高、死区小等优点,但是容易被污染,易发生卡滞等故障,不适合应用于空间飞行器[4].电机阀的结构较为复杂,也存在可靠性较低的问题.
比例电磁阀基于比例电磁铁技术,可以通过改变输入电流调整阀门的开度.从而实现流量的无级调节[5],具有结构简单,易于加工、便于装配、响应快速、可靠性高、成本较低等优点,非常适合空间推进系统流量调节的应用需求.
但是,一般的比例电磁阀在应用中存在以下局限性:(1) 无法适应大负载工况.当工作压力较高或者阀门通径较大时,阀门上下游会形成较高的压力差,需要较大的电磁力才能克服压差,打开阀门.但是阀门一旦开启,压差力又将大幅下降,导致阀芯的受力平衡关系被打破,使得阀门衔铁难以保持在静止的节流位置.因此,大部分比例电磁阀只能应用于氙气贮供和冷气微推力调节等低负载小流量工况.(2) 电磁材料B-H曲线的非线性和迟滞特性会严重影响阀门电流输入和流量输出的比例特性[6-7],不利于系统的开环控制.
本文提出了一种新型的比例电磁阀设计方案,在优化比例磁路设计的基础上,利用平衡腔结构消除了压差力的影响,使阀门可以始终工作于“近似空载”的状态,并采用线性化控制器对电磁迟滞非线性现象进行补偿,实现了比例电磁阀在大负载工况下对流量的高线性度开环控制.
1 比例电磁阀的结构方案
设计比例电磁阀,特别需要关注电磁力、弹簧力以及压差力之间的三力平衡.从零流量到满流量范围内,衔铁必须能够稳定的保持在任意一个节流位置上,从而实现流量的无级调节[8-9].
因为弹簧力随衔铁位移的变化遵循胡克定律,是线性关系,所以为了保证力的平衡关系,需要将问题聚焦于电磁力的控制和压差力的消除.
1.1 磁路结构设计
应用于非线性电磁铁的经典电磁力计算公式如下[10-11]:
(1)
其中,Φ为磁通,Rδ为气隙磁阻,δ为气隙长度.从式(1)看出,Φ与电磁力F之间是明显的非线性关系.如图1所示,励磁电流I与Φ也是非线性关系.因此,需要通过磁路设计,使电磁力F和控制量I近似形成比例关系.

图1 软磁材料Φ-I曲线Fig.1 Φ-I curve of soft magnetic material
如图2所示,在螺管式电磁阀的磁路结构上,除了传统的工作气隙A区(作为衔铁的作动距离)以外,设计了一个较大的漏磁气隙B区.由于B区的存在,导致整个磁路的磁阻很大,可以确保阀门工作点位于低磁通区域,则阀门始终工作于Φ-I曲线的相对线性部分,如图1所示.

图2 比例电磁阀磁路结构示意图Fig.2 Schematic diagram of the proportional solenoid valve’s magnetic circuit structure
在衔铁吸合过程中,随着气隙δ的减小,磁阻减小,磁通Φ增加,会导致电磁力急剧增大,打破与弹簧力之间的平衡关系.
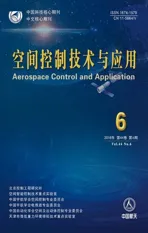
为了抑制该问题,在磁路中增加了比例极靴结构,如图3所示.当衔铁远离吸合面时,比例极靴的尖角α靠近衔铁,因此B区的侧向漏磁相对较小,获得较大电磁吸力来启动阀门;当衔铁开始吸合时,侧向漏磁逐渐增多,磁通Φ相对减小,降低了电磁力的增速,从而有效的抑制了电磁力过快增长,使其与弹簧力保持相对平衡,令衔铁可以悬停于中间位置.
图3 衔铁在不同位置时的间隙变化Fig.3 The gap changes of armature at different positions
使用Ansoft有限元仿真软件,对比例电磁阀的静态特性进行模拟[12-13],对B区间隙和比例极靴的尖角α角度进行优化设计.其优化目标是保证阀门在0.4 mm间隙至1.6 mm间隙的范围内,电磁力F与气隙长度δ呈近似线性变化的关系(如图4所示),且尽量提高初始电磁力(间隙最大时),以使得阀门同时获得较大的电磁力初始值和较高线性度.

图4 有限元仿真计算的电磁力-位移关系Fig.4 The relationship between magnetic force and displacement
1.2 压力平衡结构设计
为了消除介质负载形成的压差力,设计了平衡腔结构,如图5所示,以实现阀门从开启到关闭全过程的压力平衡[14].

图5 比例电磁阀压力平衡腔结构图Fig.5 Structure diagram of the proportional solenoid valve’s pressure balance chamber
该平衡腔采用了一种对称结构,利用阀杆、阀体和阀座构建了上下两个压力腔,上腔与入口连通,下腔与出口连通,两个腔的压力作用面积必须与密封面积相等.

所以,阀门从零流量至满流量工作范围内,始终只需要考虑电磁力和弹簧力的作用.
2 控制模块设计
由于比例电磁阀具有强感性的负载特性,并且存在迟滞的问题,所以需要配合前馈控制器模块,结合相关的控制算法来进行对阀门的电磁迟滞非线性现象的补偿,实现阀门流量与输入控制信号的线性控制.
采用基于Bouc-Wen模型构建的前馈控制系统[15-16],其控制器原理框图,如图6所示.

图6 比例电磁阀控制器系统总体原理框图Fig.6 Total schematic diagram of the proportional solenoid valve’s control device
比例电磁阀的输出电磁力与励磁电流之间存在严重的迟滞特性,可将电磁阀执行器的输出力看成是线性分量和迟滞分量的叠加,并提出如下模型:
F(t)=kvIA(t)+h(t)
(2)
式中:F(t)为电磁阀的输出电磁力;I(t)为电磁阀的励磁电流;kv为电磁阀的输出电磁力与作用电流之间的比率常量;h(t)为迟滞力分量.利用Bouc-Wen迟滞算子模拟迟滞位移分量,可以表示为:

(3)

式(2)~(3)构成了电磁阀基于Bouc-Wen模型的前馈线性化控制方法.如图7所示,通过对比例电磁阀的迟滞输出力进行“学习观测”,可以求解A、β和γ的参数,然后利用得到的迟滞力对比例电磁阀的输入电流进行补偿,实现阀输出力与输入电流之间迟滞关系的线性化控制.

图7 比例电磁阀的前馈线性化控制器原理图Fig.7 Schematic diagram of the proportional solenoid valve’s feedforward linearized control
3 产品实现及测试验证
采用上述技术方案,研制了一套比例电磁阀及其线性化控制器样机,如图8~9所示,可以实现250 N变推力单组元发动机的流量调节.阀门等效通径为4 mm,工作压力可以达到10 MPa以上.

图8 比例电磁阀实物照片Fig.8 The photograph of the proportional solenoid valve

图9 阀门线性化控制器照片Fig.9 The photograph of the valve’s control device
控制器采用28 V直流供电,通过电源管理模块同时驱动控制器芯片和阀门线圈.控制指令通过串口数字量进行输入,从00字位至FF字位分为256个控制点,实现了阀门流量的高分辨率数字化控制.
由于阀门采用了压力平衡设计,阀门空载与负载特性并无明显差异,所以在空载条件下进行了衔铁行程随电流变化的曲线测试:如图10(a)所示,在没有控制器补偿的情况下,阀门的磁滞现象仍然比较明显;通过对补偿模型的修正,首先消除了升程和回程曲线之间的滞环,并使得电流—行程曲线的线性化程度得以大幅提升,升回程曲线簇全部拟合到图10(b)所示的回归曲线中.经过回归分析,拟合优度的确定系数R2值可以达到0.999,表明回归直线对观测值的拟合程度非常好.

图10 控制器补偿前(a)和补偿后(b)电流—行程曲线图Fig.10 Comparison of current and displacement curves before (a) and after (b) controller compensation
以酒精为试验介质进行负载性能试验,从0-255的控制点数中选取若干个位置点,在0.2 MPa的额定压降下,对比例电磁阀及线性化控制器进行了质量流量测试,测试过程中每点数据采集时间在10 s以上,观测流量非常稳定,表明阀芯位置稳定无震颤,测试结果如图11所示.
从图11(a)中可以看出,当控制点数超过200时,阀门流量已经接近饱和,表明此时阀门节流位置已经不在阀口开度上.对0~200控制点范围内的流量曲线进行线性拟合,如图11(b)所示,R2值为0.988,表明该设计方案可以实现超高线性度的数字化比例流量控制.
图11 比例电磁阀的负载流量曲线Fig.11 Load flow curves of the proportional solenoid valves
4 结 论
流量调节技术是变推力发动机系统研究的重点和难点,比例电磁阀作为一种理想的流量调节方案,在未来将得到广泛应用.本文提出了能够适应大负载工况的超高线性度的比例电磁阀设计方案,具有以下特点:
(1) 采用低磁通工作点和比例极靴的磁路设计,大幅抑制了电磁力随着行程变化的增速,有效改善了其非线性和滞环特性.
(2) 采用平衡腔结构设计,使阀门从零流量至满流量工作范围内,只需要考虑电磁力和弹簧力的作用,排除了压差力的干扰.
(3) 采用前馈补偿迟滞线性化及电流驱动放大器的控制器模块,结合控制算法对阀门的电磁迟滞非线性现象进行补偿,并实现了数字化的控制指令高分辨率调节.