多旋翼无人机低空航迹规划问题
2019-01-21杨君刚王程远
杨君刚,王程远,贾 茹
(1.国防科技大学信息通信学院,陕西 西安 710106;2.69012部队,甘肃 兰州 730058)
近年来,得益于MEMS(Micro-Electro-Mechanical System,微机电系统)技术的迅猛发展,GPS、陀螺仪、加速度计等设备得以不断完善,使得无人机系统可靠性、稳定性、安全性等得到了大幅度提高,飞行控制、位置获取、图像处理等核心技术也有了长足进步,其应用越来越广泛[1].并且,由于多旋翼无人机具备空中悬停、侧飞、倒飞等飞行能力[2],相对于固定翼无人机,多旋翼无人机在低空空域中具有更好的稳定性,使其在空中航拍、末端物流配送、战场侦察等方面有着无可比拟的优越性.
多旋翼无人机通过低空飞行,可以避免多余的爬升,进而将节省的能量用于弥补续航及载重能力短板,同时在作战中可以有效避开敌防空雷达探测,达到快速隐蔽突防目的[3].但是低空飞行对无人机的性能及地面遮挡物高程估算方面要求较高.目前,多旋翼无人机的飞行航迹规划,普遍都是基于卫星二维地图或抽象地形图基础上进行平面设计,如龚清萍、许宇提出的利用兰勃特等角投影变化方法进行二维地图航迹规划[4];杨文平、李俨提出的根据威胁源抽象模型航迹规划方法[5];刘莉等提出的基于稀疏A*算法在水平面进行二维局部航迹规划方法[6];申舟等提出的基于遗传算法的战场航迹规划方法[7]等等.受制于二维地图特性及分辨率限制,无法精准获取地形起伏及地物变化数据,使得其规划出的飞行航线较为粗糙,无法满足在楼宇密集、地貌复杂区域低空飞行的需求.
本文在现有航空测绘及无人机飞行控制等技术研究的基础上,为提高多旋翼无人机在低空飞行时的效率及安全性,首先利用实装飞行的试验数据,对多旋翼无人机在低空飞行各阶段的受力状态进行细致分析,讨论低空飞行不同时段的飞行姿态特点及异常状态原因,得到相对平稳可靠的飞行方式,然后利用WGS-84坐标系将倾斜摄影技术生成的三维数字高程模型(简称DEM模型)与无人机飞行参数信息进行关联,将无人机航迹在DEM模型中叠加展示,直观呈现航线部署及遮挡情况,在对航线进行优化后将航线数据导入无人机控制平台中进行飞行控制.
1 多旋翼无人机受力状态分析
多旋翼无人机因为不变桨距和没有减速机构,想要实现在起飞、爬升、巡航、悬停和降落等各个阶段均保持最佳稳定状态是不现实的[8].由于受到力学理论,特别是流体力学理论的限制,实飞数据的获得和分析是发现不同情形下飞行姿态特点及影响因素的最主要途径.本文中的数据来源于无人机飞行控制器黑匣子实时记录存储的飞行状态数据,ACC为飞机机架震动的加速度数值,ALT为飞行高度.试验所使用无人机为自组的四旋翼无人机,其轴距为450 mm,使用Pixhawk飞行控制器及NEO-M8N卫星模块,动力系统采用飓风U2216 KV900电机及1147定桨距螺旋桨,4S30C 5200mah锂电池,测试地区海拔650 m,测试当天气温32 ℃,风力3级.
1.1 上升过程中的状态分析
多旋翼无人机在垂直上升过程中,由于垂直方向受力与螺旋桨挤压空气流向相同,且挤压后空气速度远大于垂直方向风速,飞行状态稳定.如图1所示,80 s到93 s区间为飞机爬升阶段,在该阶段中ACC值:MAX=0.868,MIN=-1.082,极差=1.95,方差=0.108,可得在该状态飞机震动稳定,机体状态良好.
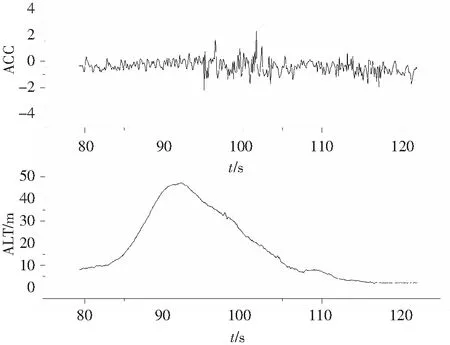
图1 3.38 m/s下降速度机体震动分布Fig.1 3.38 m/s descent velocity body vibration distribution
1.2 快速下降过程的状态分析
如图1所示,在93 s到107 s,飞机从47.32 m快速下降至7.1 m,平均下降速度为3.38 m/s,此阶段ACC值:MAX=2.548,MIN=-3.144,极差=5.693,方差=0.389,机体出现瞬时高强度震动,在108 s后开始减速,震动减弱,姿态恢复.这是由于机体在垂直下降或者小角度快速下滑过程中,剧烈的相对运动使得机体下方气流向上快速运动,并使桨尖涡螺旋线堆积在桨盘下方,形成涡环.随着旋翼的不断旋转,涡环也逐渐累积强度,直到状态被破坏后使得机体进入大幅度震动状态,进入涡流状态,若不及时脱离涡流,甚至会出现"功率沉陷"(即尽管用了全部的功率,飞机仍然保持下降),使得飞机失去控制造成事故[9].
1.3 低速下降过程的状态分析
图2给出无人机以0.5 m/s速度下降并采用一定下滑角时飞行高度与机体震动之间的关系,在310 s之后的下降阶段,ACC值:MAX=1.793,MIN=-1.961,极差=3.756,方差=0.209,飞机姿态无异常波动,飞行较为平稳,由此可知,当MRA采用低速及小下滑角方式下降时,可有效降低机体异常震动.
1.4 近地悬停及飞行时的状态分析
当MRA高度贴近地面时(高度小于5倍旋翼直径[10]),由于地面的干扰使得气流在旋翼下方整个机体的上下压力差增大,升力增加,导致飞机姿态出现波动,稳定性下降,地面效应开始浮现.同时,由于多旋翼多桨盘特点,其在接近地面悬停时,飞行控制器主板气压计会因周围气流速度变化而产生压力误差,导致参数异常,使飞机出现高度不稳定的异常状态,这对于轴距与载重较大的MRA尤为危险.如图3所示.

图2 0.5 m/s下降速度机体震动分布Fig.2 0.5 m/s descent velocity body vibration distribution

图3 多旋翼低空悬停机架震动分布Fig.3 MRA low altitude hover and vibration distribution
旋翼机在近地定高悬停时,气压计ALT数据出现数值异常,记录高度从1 m到3.5 m之间波动.同时,飞控在异常气压计数据基础上,为保持飞机悬停姿态,需要不断对变化值进行响应,调整各动力轴电机输出功率,频繁的姿态调整使得机体震动大幅增加,此状态ACC值:MAX=10.95,MIN=-8.51,极差=19.46,方差=5.99,在203.2 s到203.3 s间,ACC值从9.12直接跳至-5.41,跨度接近18,机体处于极度不稳定状态.
2 多旋翼无人机飞行航迹设计
由MAR姿态分析可知,无人机在上升和高空水平飞行时ACC值波动小,飞行姿态稳定,但在快速垂直下降及贴地面飞行时,ACC值波动大,飞机震动幅度大幅增加,影响飞行安全.因此,在多旋翼无人机飞行过程中要尽量避免快速垂直下降及贴地飞行,可采用类似固定翼飞机以一定下滑角的下降航线飞行.由此,可得出MAR安全且有效的航线规划方法为:飞机上升时按照一定角度做斜向上爬升,下降过程中按照下滑角做斜向下飞行,在抵达目的地时近地面悬停进行物资投送或探查巡检等任务,而后原路返回.如图4所示,A点为投送起始点,飞行任务开始后飞机迅速垂直向上并在B点处悬停,B点高度约为1.5~2 m,此高度既可以确保飞机摆脱地面效应干扰,同时可方便地面人员检查飞机状态,检查完成后飞机爬升至C点,C点为航线最高点,之后爬升状态结束,飞行器转为平飞,待进入下降航线后降至D点,D点为目标送达区域E点正上方5倍旋翼直径高度(5R),在该高度飞机完成空投或探查任务后原路返回.
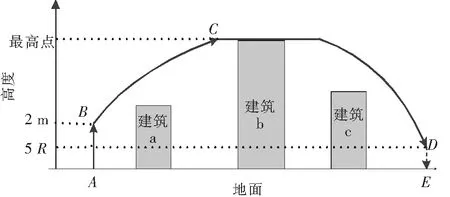
图4 逻辑航线示意Fig.4 MRA logic route diagram map
3 验证试验
实验以某地为假想任务地域,通过利用倾斜摄影生成DEM模型,在Mission Planner地面站中规划无人机飞行航迹,而后将规划后的航迹在DEM模型中叠加呈现,并最终发送给无人机按照该航迹进行验证飞行.
第一步:倾斜摄影建模.
倾斜摄影建模图像采集使用大疆创新公司生产的精灵3无人机,搭载配套的影像传感器(1/2.3英寸CMOS,镜头FOV94° 20 mm f/2.8),在50 m高度分别设置云台角度为0°、+40°、-40°,航向重叠率80%,旁向重叠率70%,拍照间距4 s.图像采集完成后导入ContextCapture软件进行处理建模,并将生成模型导出至谷歌地球中作为地形基础数据.
第二步:规划航迹信息.
利用Mission Planner(简称MP)地面站进行航迹初规划,任务共设置13个航迹点,其中1号为起飞点,13号点为返航降落点,8号航点为任务目的地航点.规划中2—4号航迹遮挡建筑采用变高规避方式,对4—8号航迹遮挡建筑采用绕飞方式,对9—10号航迹遮挡建筑采用定高飞跃方式进行,相应航点高程参数由DEM数据获取,冗余量为5 m.
第三步:航迹信息判定.
将MP地面站中规划好的航迹以KMZ格式导入DEM文件进行叠加展示,直观查看航迹匹配情况,对存在问题点进行记录,并在MP地面站中进行相应修改,修改后发送至无人机端执行飞行任务.
此次任务倾斜摄影建模阶段共飞行4架次,采集图片2 214张,导入程序处理后可用2 198张,生成模型精度小于0.3 m.无人机航点自动飞行途径13个航点,进行5次高度变化,最大爬升角33°,最大下降角47.7°,最大下降速度2 m/s,最大飞行速度8 m/s,平均飞行速度4.2 m/s,飞行距离1 199.7 m,如图5所示,在300 s附近出现的大幅震动为飞机落地冲击,飞行过程中(0~290s)ACC值:MAX=1.066,MIN=-1.361,极差=2.428,方差=0.116.

图5 自动飞行机体震动分布Fig.5 Body vibration distribution in automatic mode
图6为全阶段飞机电池电压数据图,由图可知在无人机起飞、爬升、降落全过程中,动力输出无异常波动,整体飞行机体震动较小、姿态可控、动力输出稳定.
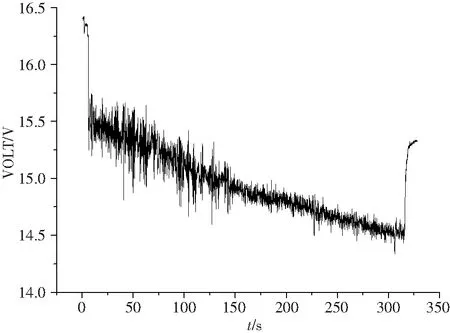
图6 自动飞行电池电压数值Fig.6 Battery voltage value in automatic mode
