重型压力容器马鞍形焊缝焊接机器人设计分析*
2019-01-18薛良豪卢永鑫李增民
杨 涛,魏 敏,薛良豪,卢永鑫,李增民
(1.石河子大学 机械电气工程学院,新疆 石河子 832003; 2.天业汇能工业设备安装有限公司,新疆 石河子 832000)
0 引 言
在重型压力容器的生产制造中,如石油、化工装备中各种高温高压反应器以及大型锅炉,经常会遇到筒体与接管所形成的马鞍形焊缝焊接作业[1]。对于这类复杂空间曲线焊缝的焊接,目前企业通常采用手工电弧焊进行焊接,手工电弧焊焊接效率低、劳动强度大、对焊工的焊接技术水平要求较高,且焊后一致性差,废品率也高[2-3]。国外企业大多采用关节式焊接机器人对重型压力容器马鞍形焊缝进行焊接,虽然焊接效率高、焊接质量稳定,但关节式焊接机器人焊接系统复杂、体积大、成本较高,而且目前国内市场上的马鞍形焊缝焊接机器人大多只适用于中小型规格压力容器马鞍形焊缝的焊接[4-5]。因此,笔者针对马鞍形焊缝空间曲线特点,设计了一种适用于重型压力容器马鞍形焊缝焊接的焊接机器人,对于推动重型压力容器马鞍形焊缝焊接自动化、缩短重型压力容器制造周期、降低生产成本具有重要意义。
1 马鞍形焊缝数学模型的建立
按照接管与筒体相交位置不同,接管与筒体的分布形式主要分为正交、正交偏置和斜交、斜交偏置四类[6],以典型的接管与筒体正交所形成的马鞍形焊缝为研究对象,如图1所示。接管与筒体正交所形成的曲线是典型的马鞍形曲线,其在水平面上的投影为一圆周曲线,在z轴方向上对应着不同的角度θ,并存在着相应落差h,通常被称为马鞍落差[7-8],如图2所示。

图1 接管与筒体正交模型 图 图2 马鞍形焊缝示意图
由图2所示马鞍形焊缝示意图。筒体半径为R,接管半径为r,以筒体轴线作为x轴,接管轴线作为z轴,两轴线相交点作为坐标原点,则可知相贯线方程:
(1)
由式(1)得接管与壳体所形成相贯线参数方程:
(2)
式中:r为接管半径,mm;R为壳体半径,mm;θ为焊枪从焊接起始位置旋转角度,(°)。
由图1、图2分析得出马鞍形焊缝的焊接技术难点主要表现在两个方面:焊缝各个位置具有不同焊缝角度以及各个位置马鞍落差不同[9],这给机器人的焊接作业带来不小难度。通过马鞍形焊缝数学模型的建立,为焊接机器人总体机构的设计与虚拟样机运动学仿真提供了理论依据。
2 焊接机器人机构组成与工作原理
2.1 焊接机器人机构组成
根据马鞍形焊缝曲线特点以及马鞍形焊缝焊接工艺要求,焊接机器人机构主要有十字悬挂移动机构、升降定位机构、机身回转机构、焊枪调整机构等组成,如图3所示。通过各机构之间协调运动实现重型压力容器马鞍形焊缝焊接作业。

图3 焊接机器人本体机构组成1.焊枪 2.焊枪调整机构 3.升降定位机构 4.十字悬挂移动机构 5.升降横梁平台 6. 机身回转机构 7. 气动三爪卡盘
2.2 焊接机器人工作原理
焊接作业前,将压力容器筒体置于焊接机器人工作范围内,根据压力容器筒体与接管规格,利用气动三爪卡盘将接管卡紧,将升降横梁平台上的焊接机器人升降至合适高度;利用十字悬挂移动机构、升降定位机构完成接管与筒体马鞍形坡口的装配;利用机身回转机构、焊枪调整机构之间的协调运动,完成马鞍形焊缝焊接作业。
3 焊接机器人机构设计
3.1 十字悬挂移动机构
十字悬挂移动机构通过电机驱动滚珠丝杠,在直线导轨的共同配合下,实现机器人在升降横梁平台上的径向和横向运动,完成焊接机器人对重型压力容器马鞍形焊缝焊接作业前接管与马鞍形坡口坐标中心定位,其机构如图4所示。

图4 十字悬挂移动机构组成1.滚珠丝杠 2.丝母 3.滑动光杠支撑座 4.滑动光杠 5.驱动电机Ⅰ 6.保持架 7.驱动电机Ⅱ 8.直线导轨
3.2 升降定位机构
升降定位机构通过电机驱动卡盘转轴旋转,实现夹持在气动三爪卡盘上的接管旋转,在薄型气缸下压动作的配合下,实现接管与马鞍形坡口的装配,其机构如图5所示。
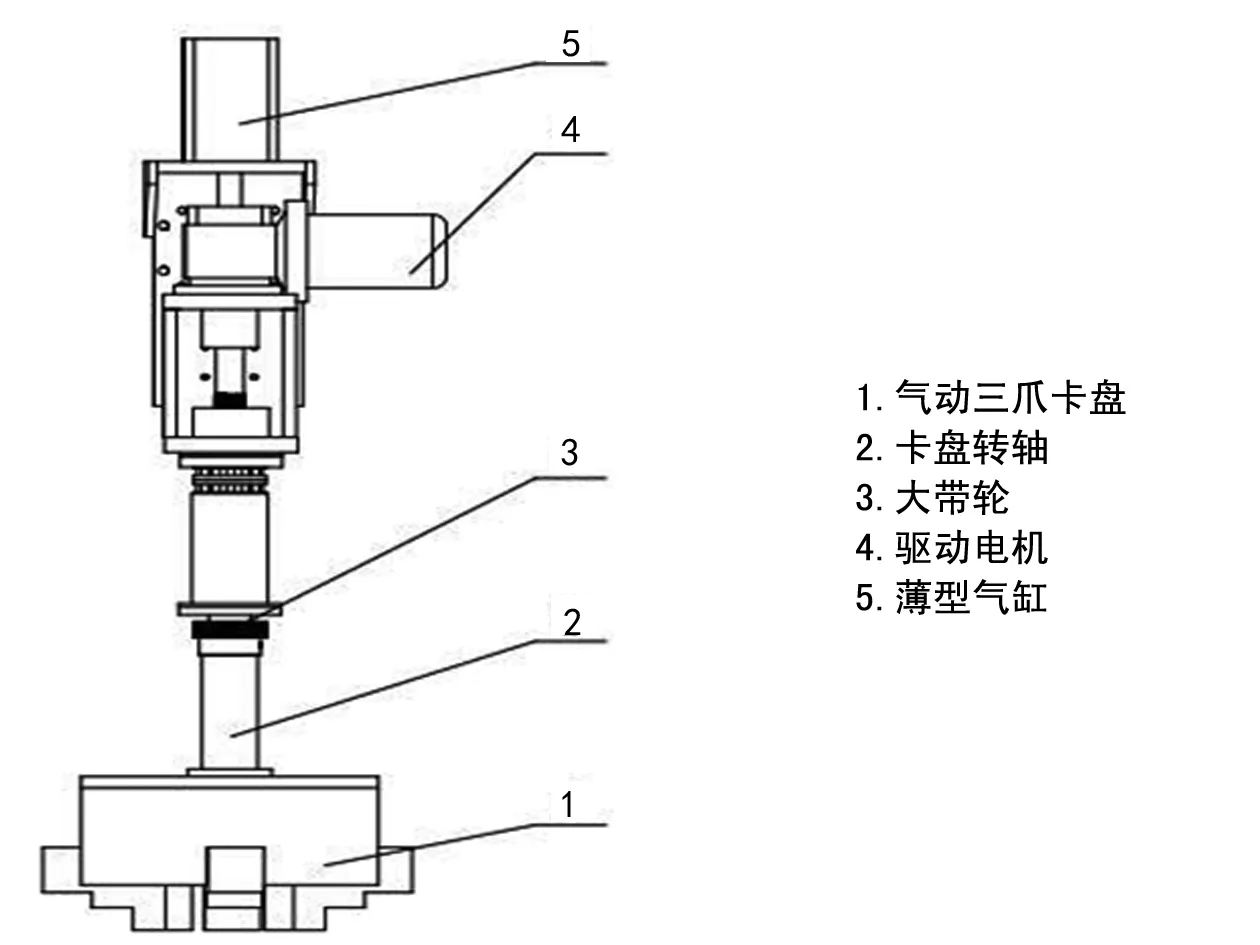
图5 升降定位机构组成
3.3 机身回转机构
机身回转机构通过电机驱动小带轮与电机驱动滚珠丝杠实现焊枪在马鞍形焊缝焊接过程中焊枪的回转运动以及在x轴、y轴平面的径向运动,其组成结构如图6所示。
3.4 焊枪调整机构
焊枪调整机构通过电机驱动带轮传动,在直线导轨的配合运动下,实现焊枪在z轴方向的直线插补运动;通过电机驱动转轴运动实现焊枪位姿角度的调节。其组成结构如图7所示。

图6 机身回转机构组成1.支撑座 2.滑动光杠 3.保持板 4.驱动电机Ⅰ 5.支撑板Ⅰ 6.滚珠丝杠 7.丝母 8. 驱动电机Ⅱ 9.小带轮
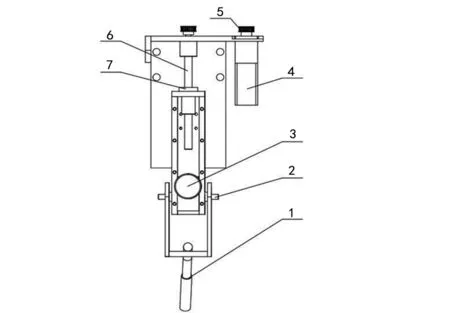
图7 焊枪调整机构组成1.焊枪 2.转轴 3.驱动电机I 4.驱动电机Ⅱ 5.同步带轮 6.滚珠丝杠 7.丝母
焊接机器人通过各机构的协调运动实现重型压力容器马鞍形焊缝的焊接,具体性能参数如表1所示。

表1 焊接机器人各项性能参数
4 焊接机器人运动学仿真分析
4.1 机器人结构的简化与模型的建立
由于该机器人结构复杂、零件多,为了保证仿真优化精度,减少约束定义,对机器人结构进行了简化,只保留机器人焊接作业时的运动机构,利用Solidworks软件建立好简化的几何模型,通过Adams提供的软件接口,将三维模型转换成Parasolid(x_t)格式,导入Adams软件[10-11]。这里对筒体直径为2 282 mm与接管直径为398 mm所形成的马鞍形焊缝进行运动学仿真,约束定义与焊枪仿真运行轨迹,如图8所示。

图8 约束定义与焊枪仿真运行轨迹
4.2 仿真结果与分析
对机器人运动仿真后,利用Adams/Post Processor后处理模块,对焊枪末端运行轨迹进行分析,分析结果如图9所示。

图9 焊枪末端运动位移曲线
由图9可以看出红色、蓝色、粉色曲线分别为焊枪末端标定点在x、y、z轴随时间位移运行轨迹,焊枪末端标定点在x、y轴方向位移运行轨迹为一圆周曲线,符合马鞍形焊缝数学模型,而焊枪末端标定点在z轴方向运行轨迹应为类似于正弦曲线的轨迹,由图9可以看出焊枪末端标定点在z轴方向运行轨迹有所偏差,经过分析是由于插补算法精度低造成的,后续进行改进。焊接机器人的运动学仿真为机器人机构与控制算法优化提供了重要理论依据。

图10 焊接机器人焊接试验
5 马鞍形焊缝焊接机器人试验
对机器人进行优化改进后,2018年6月在天业汇能工业设备安装有限公司进行压力容器马鞍形焊缝焊接试验。试验结果表明,通过分析和优化后的焊接机器人在焊接作业时运行更加平稳,焊缝合格率达到98%,可以较好的满足压力容器马鞍形焊缝焊接作业,如图10所示。
6 结 语
对重型压力容器马鞍形焊缝焊接机器人进行了马鞍形焊缝数学模型的建立、本体机构的设计、运动学仿真以及焊接试验。通过上述分析和研究,有利于对重型压力容器马鞍形焊缝焊接机器人的机构设计、运动学特性等有更加深层次的了解,为重型压力容器马鞍形焊缝焊接机器的生产制造和控制系统的设计及选择提供了重要的理论依据。
