多功能助残专用轮椅的设计与有限元分析*
2019-01-18陈建枫董祖阳
陈建枫, 周 丹, 董祖阳
(1.攀枝花学院 机械工程学院,四川 攀枝花 617000; 2.浙江松田汽车电机系统股份有限公司,浙江 温州 325200)
0 引 言
轮椅一直是老年人和残疾人不可或缺的代步工具,随着人们生活水平的提高,对轮椅有了更多的要求。而现有的轮椅以手动居多,电动轮椅虽然比手动的要方便,但它们的功能较单一,使用者仍有不便。
因此在电动轮椅的基础上设计出一款具有电动行驶、上厕所、升高取物、攀爬楼梯等多种功能的多功能助残专用轮椅是非常有必要的。
1 多功能助残专用轮椅的设计
多功能助残专用轮椅主要由轮椅上厕所系统、轮椅转向系统、轮椅车身框架、轮椅攀爬楼梯系统、轮椅升高取物系统、轮椅驱动系统等构成[1],如图1所示。
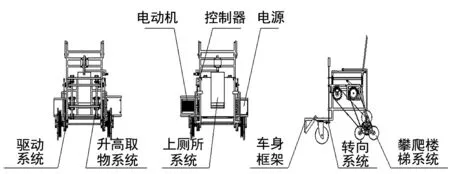
图1 多功能助残专用轮椅结构图
1.1 轮椅上厕所系统设计
为了方便不能自行入厕的肢残人和老年人,在设计方案中设计了一个上厕所的方案。通过查阅相关资料,发现市面上有座厕轮椅,分为小轮式坐厕椅、带便桶的轮椅。考虑到有些家庭和公共场所有坐便器,因此设计的轮椅下方要留有坐便器的空间,便于轮椅倒着进入坐便器上方,让不能自行入厕的肢残人和老年人也能使用坐便器[2]。除此之外,在轮椅下方留有空间也便于在轮椅下方悬挂便桶,这样便可以轻松实现不能自行入厕的肢残人和老年人在户外、室内的上厕所难题。并且在轮椅下方留有空间也可以给轮椅以后的改进留下空间。轮椅上厕所系统空间布局如图2所示。
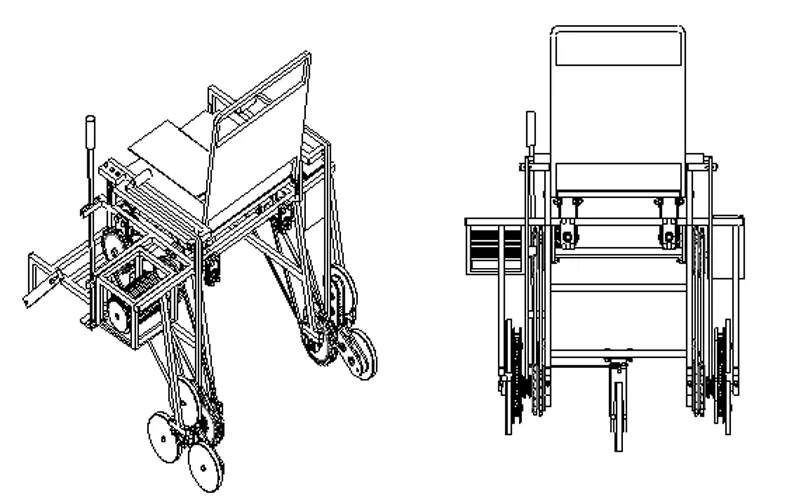
图2 轮椅上厕所系统空间布局图
1.2 轮椅转向系统设计
前轮转向式(三轮式)也用直流减速电机驱动后轮转动使轮椅前进,电机控制系统通过调节直流电机转速来改变轮椅行驶速度。但在转向系统中并没有运用电机,而是使用了一些简单的机械结构来实现前轮的转向。当使用者坐在轮椅上摇动手柄的时候,固定在轮椅架上的前轮随之而左右偏移从而实现轮椅的转向。轮椅转向装置如图3所示。
1.3 轮椅车身框架设计
主框架部分还可以细分为:承重部分(包括电池的承重部分、电动机的承重部分以及轴和齿轮的承重部分)、脚托和腿托部分、扶手或臂托部分。轮椅主框架如图4所示。
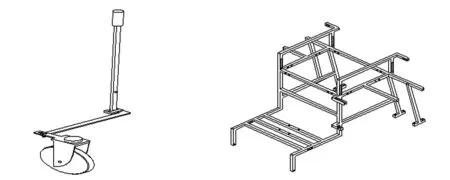
图3 轮椅转向装置图 图4 轮椅主框架图
1.4 轮椅攀爬楼梯系统设计
攀爬楼梯的功能实现、动力的来源与代步功能相同,也来自于链轮传动,两者的不同点在于离合器所处方位不同。当离合器处在中间位置,既不与主动链轮(2号)相连也不与内三角轮架相连时,带着圆柱销的离合器与内三脚轮架上的离合盘未咬合,动力通过链轮传动传至后轮主轴上带动固定在后轮主轴上的圆柱齿轮转动,这个中心大齿轮通过齿轮传动将动力传至3个轮子上,这样3个轮子全都保持独立行走,实现平地移动;而当移动离合器, 使离合器处在右边位置,可使其与内三脚轮架连接在一起,这时外来动力使后轮主轴旋转,因为离合器与后轮主轴通过键连接在一起,所以内三脚轮架跟着主轴一起旋转,以此攀爬楼梯[3]。三角行星轮式攀爬机构如图5所示[4]。
1.5 轮椅升高取物系统设计
在升高取物功能中,多功能轮椅采用了螺母丝杠机构与平行四杆机构的组合。使用者推动手柄,离合器进而移动,从而使电动机产生的动力通过主动链轮(2号)与从动链轮(2号)的链传动使圆柱齿轮转动,让它带动锥齿轮传动,进而使丝杠转动;丝杠转动后,螺母滑块便会前后移动,向前移动时,借助平行四杆机构使撑杆撑起座板,从而使人升高;向后移动时,就可使座板下降。使用者可以通过按控制器来控制电动机正反转来控制螺母滑块的前后移动,进而控制座板的升高降低。
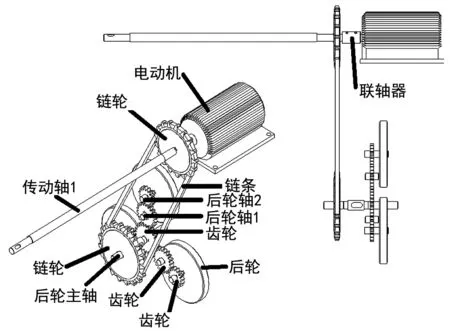
图5 三角行星轮式攀爬机构
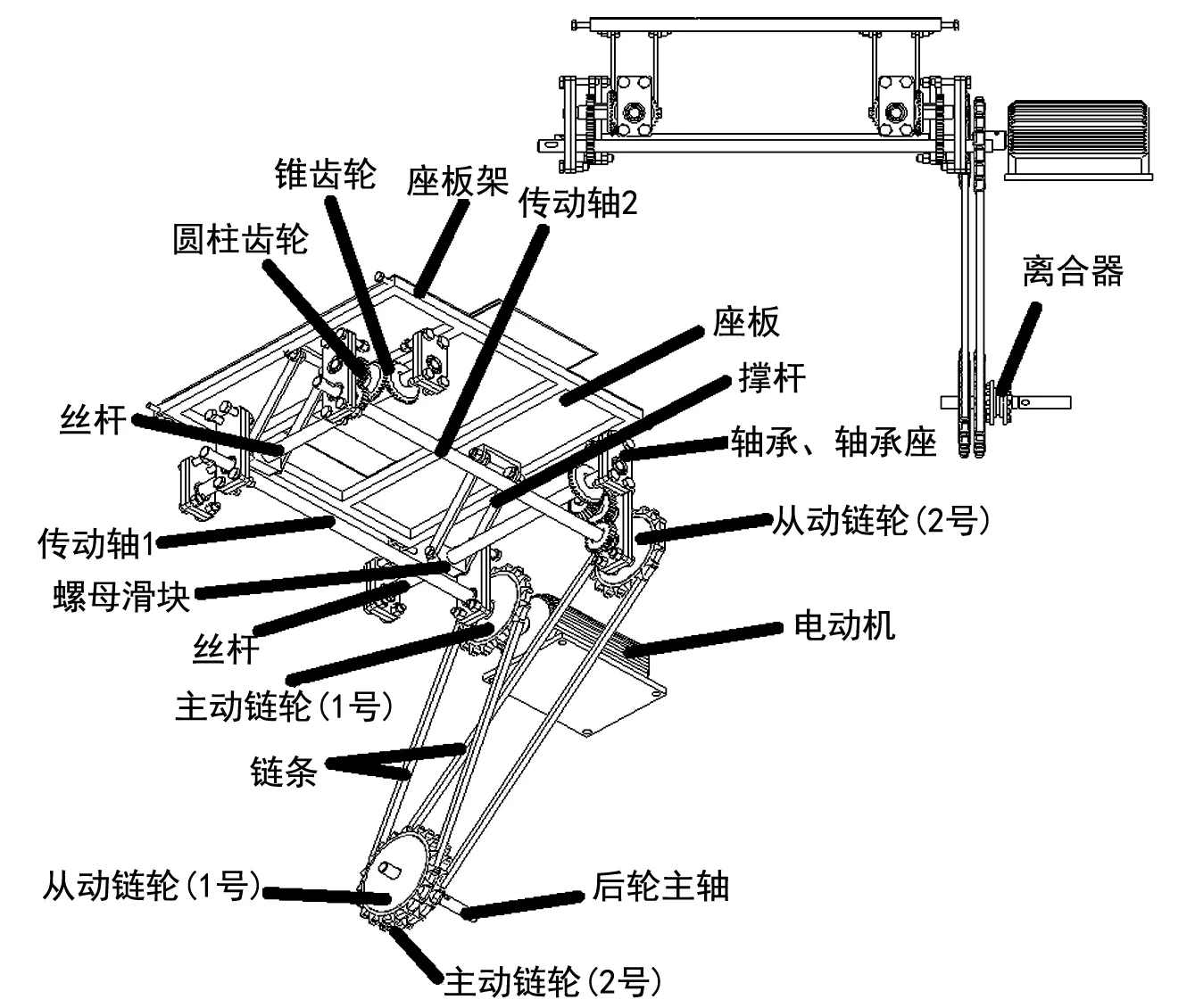
图6 轮椅驱动系统
1.6 轮椅驱动系统设计
轮椅的驱动系统是多功能助残专用轮椅的关键系统,正是该部件的设计和运用才使得该产品不仅可以在平地上安全、方便的行驶,同时通过动力的转换,还可以实现轮椅的攀爬楼梯以及升高取物这些特殊功能。该系统部件主要由传动轴1、传动轴2、动力转换部件、离合器、电动机以及若干齿轮和轴承组装而成,如图4所示。其运动的过程是:
电动机通过联轴器与传动轴1相连使2个主动链轮(1号)转动;通过链条传动,将动力传至2个从动链轮;2个从动链轮分别通过与之相连的后轮主轴带动固定在后轮主轴上的圆柱齿轮转动;最后依次通过圆柱齿轮传动,将动力传到与后轮相连的轴上。
(1) 平动:当离合器处在中间位置,既不与主动链轮(2号)相连也不与内三角轮架相连时,带着圆柱销的离合器与内三脚轮架上的离合盘未咬合,动力通过链轮传动传至后轮主轴上带动固定在后轮主轴上的圆柱齿轮转动,这个中心大齿轮通过齿轮传动将动力传至3个轮子上,这样3个轮子全都保持独立行走,实现平地移动。
(2) 攀爬楼梯:而当移动离合器, 使离合器处在右边位置,可使其与内三脚轮架连接在一起,这时外来动力使后轮主轴旋转,因为离合器与后轮主轴通过键连接在一起,所以内三脚轮架跟着主轴一起旋转,以此攀爬楼梯。
(3) 升高取物:当移动离合器, 使离合器处在左边位置,可使其与主动链轮(2号)连接在一起,这时外来动力使后轮主轴旋转并且带动主动链轮(2号)旋转,再通过一系列的传动使座板上升下降,实现升高取物的功能。
其结构的关键所在就是:离合器所处位置的不同。轮椅驱动系统如图6所示,离合器如图7所示。
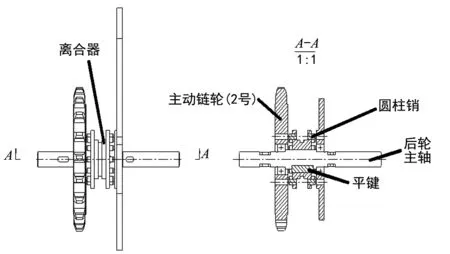
图7 离合器示意图
2 多功能轮椅车结构有限元分析
车身主体采用的材料是Q235,弹性模量为200 GPa,泊松比为0.3,材料的许用应力为117.5 MPa,所采用的板的厚度分别为3、10、20 mm。通过定义面面接触来模拟滚珠在丝杠上的滚动,取摩擦系数为0.003,主面为滚珠丝杠副,从面为丝杠。根据轮椅实际工作情况建立了两种典型工况 :第一种是座板架升高到最高点处,此时丝杠受到的弯曲力最大,为了保证轮椅的强度和刚度要求,需要分析轮椅此时的结构应力和变形;第二种工况是在轮椅攀爬楼梯时,此时轮椅后轮轴承受载荷较大,因此需要分析此时的结构应力和变形[5]。
2.1 座椅架体升至最高点处的静强度分析
座板架升至最高点应力分布云图如图8所示。从图8中可以看出,大部分零件都满足强度要求,但大小座板、座板架以及框架的一些地方超过了材料许用应力值。因此需要对这些比较薄弱的地方要进行一些加强。
2.2 轮椅攀爬楼梯时的强度分析
(1) 在轮椅即将开始攀爬楼梯时(即平动状态),大多数零件符合强度要求,但三角架以及后轮超过了材料许用应力值,如图9所示。
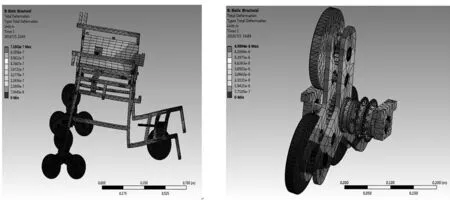
图8 座板架升至最高处应力分布 图9 行星轮即将爬楼梯时
(2) 当轮椅攀爬楼梯时,有一种一个后轮接触楼梯,另外两个悬空的情况。在这种情况下,后轮、后轮主轴、后轮轴以及两个三角架都超过了材料许用应力值,有较为严重的变形,如图10所示。
(3) 当轮椅攀爬楼梯时,还有另外一种更为常见的情况,即两轮接触楼梯,一轮悬空。在这种情况下,大多数零件符合强度要求,但三角架以及后轮超过了材料许用应力值,如图11所示。
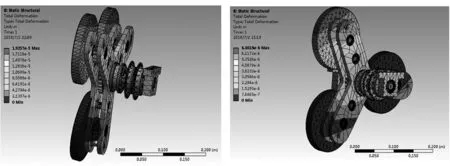
图10 行星轮一轮接触楼梯时 图11 行星轮两轮接触楼梯时
3 改进措施及其分析结果
3.1 结合本项目提出改进措施
根据以上分析结果,轮椅车整体结构比较合理,大多数零件的强度都符合要求,但个别零件强度不够。一方面对于强度不够的零件通过增加厚度值来改善强度情况,如增加框架中在前下部拐角处的厚度值到25 mm,座板架的厚度值也增加到25 mm。对于强度有盈余的零件可以通过减少厚度值或采用空心来减少整车质量,提高行驶里程,如将轮椅的框架都采用空心方钢。另一方面为了增加整体的方案强度和刚度,对轮椅车局部结构进行修改:在轮椅框架前部变形较大处加装类似加强筋的结构。
3.2 改进后结果
基于以上改进措施修改了轮椅车有限元模型,对座板架升到最高处和轮椅攀爬楼梯时的强度分析重新计算,结果如下:
改进后升至最高处应力分布云图,如图12所示。
变形量以及应力较之前有了改善。虽然图中小座板仍然承受较多的应力,但实际是框架在受力,而框架整体情况还算良好,因此改进后基本能实现设计要求。
图12 座板架升至最高处应力分布(修改后)
4 结 论
(1) 该轮椅是根据市场上卖出的普通轮椅的不便之处进行了改进成的电动轮椅,可以实现平地行驶、攀爬楼梯、升高取物、上厕所等功能,减轻了使用人员的劳动强度,给老年人和残疾人士的生活带来极大的便利和帮助。
(2) 在设计过程中采用有限元方法,对轮椅车进行有限元分析和结构优化,提高了设计质量,缩短了产品的开发周期。
