基于称重式蒸渗仪及多种传感器的作物表型及蒸散监测系统研制
2019-01-17刘艳萍杜雅丽聂铭君薛绪掌郑文刚崔可旺
刘艳萍,杜雅丽,聂铭君,薛绪掌,张 馨※,郑文刚,崔可旺
基于称重式蒸渗仪及多种传感器的作物表型及蒸散监测系统研制
刘艳萍1,2,杜雅丽1,2,聂铭君3,薛绪掌2,张 馨2※,郑文刚3,崔可旺1,2
(1. 河北工业大学电子信息工程学院,天津 300401;2. 北京农业信息技术研究中心,北京 100097; 3. 北京农业智能装备技术研究中心,北京 100097)
作物蒸散量测量与估算在农业方面有着重要作用,而当前对于作物蒸散量的估算主要以试验的方式进行,有一定局限性,且测量面积小,与实际应用还有一定距离。针对以上问题,该文在已有24座小型称重式蒸渗仪基础上,集成RGB成像传感器、多光谱成像传感器和二维激光扫描仪于一体,配合龙门架进行移动控制,构建称重式蒸渗仪植物表型监测系统,实现18 m2植物生长过程中的RGB、红(668 nm)、绿(560 nm)、蓝(475 nm)、红边(717 nm)、近红外(840 nm)图像信息和植株高度信息的自动监测。最后通过试验,在已设定好的常用速度下,系统单趟运行用时142 s,可采集28组RGB、多光谱图像及所有植株高度信息,速度相对误差在1.8%~6.0%之间。通过对获取的夏玉米多光谱图像和激光扫描仪数据信息分析,系统能够可靠获取归一化差异植被指数等作物指数及植株高度信息。并结合气象站数据,对冬小麦主要耗水期的RGB图像进行分析,对其蒸散量进行了估计,与蒸渗仪获取的实际蒸散量对比,其平均相对误差为16.62%。该系统为大面积作物蒸散量的实时监测和精确诊断以及作物生长状况研究提供有效技术与装备支撑。
蒸渗仪;蒸散;表型;监测;多光谱图像;成像系统;图像采集
0 引 言
蒸渗仪可用于测量裸土或作物蒸散量以及深层渗漏量,已成为农田测定蒸散量的标准仪器。蒸散是生态系统水循环的重要环节,对地表能量平衡和水量平衡有着重要的影响[1-3],表型监测平台通过搭载不同类型的传感器,能够在短时间内获取多源数据[4-5],比如RGB、红外及多光谱等各种可见光与不可见光图像信息。在蒸渗仪基础上增加表型监测系统可以实现作物水分蒸散量的无损实时监测,为作物水分状况的实时监测和精确诊断提供有效技术支撑。
对于作物蒸散量的估算方法,许多学者都有研究。金菊良等[6]开展受旱盆栽试验,分别以无受旱胁迫和受旱胁迫下实测蒸散量为基础,采用遗传算法(genetic algorithm,GA)对各生育阶段单作物系数进行率定,并运用单作物系数法对无受旱胁迫和受旱胁迫下大豆蒸散量进行估算,结果表明估算值与实测值具有较好的一致性;袁宏伟等[7]通过6台大型称重式蒸渗仪,在双作物系数法估算无受旱胁迫夏玉米蒸散量的基础上,采用遗传算法优化了参考作物蒸散量的计算结果,并以此为基础运用双作物系数法估算受旱胁迫下玉米蒸散量,估算结果合理可靠。唐德秀等[8]基于2014—2016年遮雨棚下夏玉米土箱生长试验,对砂石覆盖条件下夏玉米蒸散量的单、双作物系数法计算公式进行了修正,并以小型蒸渗仪测得的蒸散量,实测对修正后的作物系数法的适用性进行了评估,表明双作物系数法的计算结果能更好地估算砂石覆盖条件下夏玉米的蒸散量。
在植物表型监测设备与系统集成方面研究较多。根据不同的应用载体平台,表型采集技术大致可分为手持、人载、车载、田间实时监控、大型室内外自动化平台、航空机载以及不同级别的卫星成像平台等[9]。当前,国外研发的此类平台比较成熟,德国LemnaTec公司的研究比较领先[10-12],研发的Scanalyzer Field是一套能够在野外独立运行的全自动、高通量植物表型成像系统,可以选择配置可见光成像、近红外成像、红外成像、PSII荧光成像、高光谱成像和激光3D成像中的一种或多种。比较著名的室内表型平台有捷克PSI公司(Photon Systems Instruments)的PlantScreenTM系统,主要用于拟南芥和豌豆等植物叶片叶绿素荧光成像和测量等[13-14]。其他系统还有苏黎世联邦理工学院(ETH Zurich)的Field Phenotyping Platform(FTP)[15]、Phenospex公司的Field Scanner[16]等。它们通过程控系统对固定数量的植株或小区进行长时间、多次数(一般每天8~12次)的扫描监测。目前国内许多学者已研究了植物表型监测在农业中的应用[17]。2009年,华中农业大学和华中科技大学联合自主研发了第1套植株表型参数自动提取系统,研究成果总体达到国际先进水平[18]。该系统测量参数主要包括株高、分蘖数、叶片角度等株型相关参数,以及绿叶面积、鲜质量、干质量等生长发育相关参数[19-20]。2014年,中国科学院植物研究所研发了国内首套高通量作物三维表型监测系统Crop 3D,包括室内固定平台、室外移动监测平台、无人机监测平台,以及在建的田间大型固定监测平台[21]。
各种估算作物实际蒸散量的方法都有一定的局限性,有的难以做到实时监测,有的无法进行大面积估算,与实际应用还有一定距离。目前,较为成熟的作物表型监测平台也集中在欧美等发达国家,中国植物表型监测技术起步较晚,无论是从自主集成研发来看,还是从投入商业量产的成熟度考虑,均与上述国家存在较大差距。同时,已有表型成套设备价格昂贵,大部分科研单位和公司都难以承受。此外,对于采集到的图像分析方法主要有:多视角立体视觉[22]、支持向量机[23]、深度学习[24]、小波分析[25]等,主要应用于植物表型与环境互作、植物生长监测、病虫害防治、农作物质量检测等领域,未针对称重式蒸渗仪开发表型监测系统。农业系统中, 垂直维度信息对作物的生长状况监测、种植管理等具有重要意义[26-27]。
基于此,本文设计了一套基于称重式蒸渗仪的大田植物表型监测系统,采用Visual Studio2017软件平台,C#语言开发,准确定位实现基于RGB和五目多光谱成像传感器以及二维激光扫描仪对大田作物表型信息的无损监测,能够同时实现测量作物蒸散量和表型监测功能,为大面积作物蒸散量的实时监测和精确诊断以及作物生长状况研究提供有效技术与装备支撑。
1 作物表型监测系统设计方案
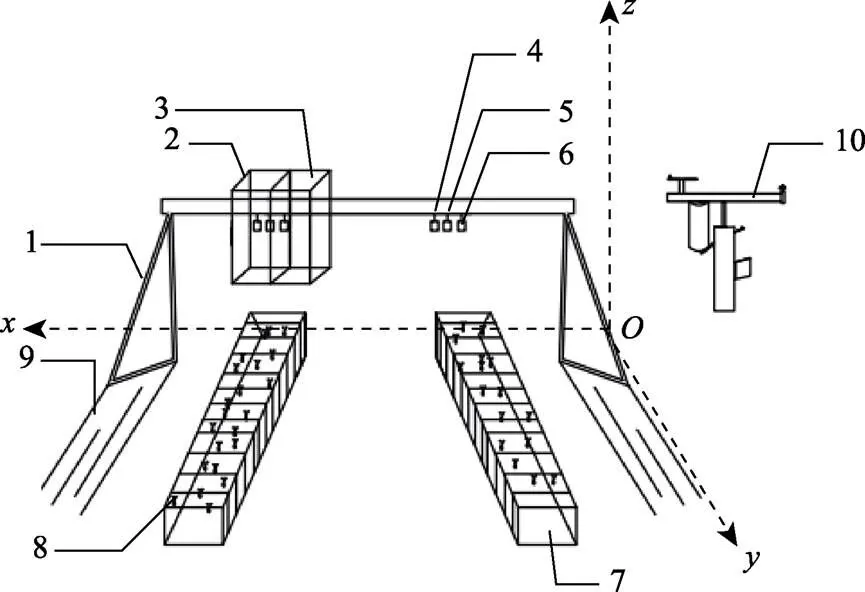
系统总体设计结构及实物图如图1所示,主要由蒸渗仪模块、表型监测模块、运动控制模块、测控平台共4个部分组成。蒸渗仪模块主要包括24座小型蒸渗仪,装在全钢结构的地下室,每座蒸渗仪区域长1 m、宽0.75 m、深2 m,有效种植面积为0.75 m2,总面积为18 m2。蒸渗仪小区内装有大田原状土壤,配有称重式蒸渗仪数据采集系统,能将压力信号转换为电信号,每隔5 min记录1次土体质量变化,测量水分增减的灵敏度为0.05 mm,并由计算机自动控制采集记录。地上还配备了气象站,按小时采集空气温度、空气湿度、辐射强度、风速、降雨量等数据。表型监测模块由RGB高速彩色相机、五目多光谱相机和激光扫描仪3个成像传感器构成。运动控制模块的核心是可编程逻辑控制器(programmable logic controller,PLC),装在电机控制柜中,负责完成龙门架的前后移动功能。PLC外面装有人机交互界面,在自动控制程序出现故障时通过人机交互界面手动控制龙门架。龙门架的左右两端都分别装了RGB高速彩色相机、五目多光谱相机和激光扫描仪3个成像传感器,随着龙门架的移动结合表型监测模块一起完成表型监测工作。测控平台是指PC柜中的上位机,负责图像数据的自动采集与存储工作。
a. 总体设计结构图
a. Overall design structure chart

b. 实物图
b. Physical drawing
1. 龙门架 2. PC柜 3. 电机控制柜 4. 激光扫描仪(左右对称) 5. RGB高速彩色相机(左右对称) 6. 五目多光谱相机(左右对称) 7. 地下蒸渗仪(左右对称) 8. 蒸渗仪表面种植的农作物(左右对称) 9. 轨道(左右对称) 10. 气象站
1. Ganty 2. PC ark 3. Motor control cabinet 4. Laser scanner (bilateral symmetry) 5. RGB high speed color camera (bilateral symmetry) 6. Five-channel multi-spectral camera (bilateral symmetry) 7. Subsurface lysimeter (bilateral symmetry) 8. Crop grown on surface of lysimeter (bilateral symmetry) 9. Orbit (bilateral symmetry) 10. Weather stations
图1 作物表型监测系统总体设计结构及实物图
Fig.1 Overall design structure and physical drawing of crop phenotypic monitoring system
2 硬件设计
2.1 表型监测模块
该监测系统主要通过对RGB图像和不同波段的多光谱图像分析,对作物耗水情况进行监测,同时监测作物的生长状态。根据需求,结合实际情况选择了3种成像传感器,共同完成数据图像采集功能:1)RGB高速彩色相机选自日本基恩士公司生产的CV-h200c,这是一款彩色CCD图像接收原件,需要配合视频控制器CV-5701一起完成图像采集的工作。其额定电压为24 V DC,分辨率为1600 pixel×1200 pixel,可达到192万有效像素,尺寸155 mm×72 mm ×62 mm。CV-5701的主处理器是数字信号处理器(digital signal processing,DSP),可进行高速图像处理,它捕获来自CV-h200c CCD的图像并进行传输,像素传输频率达到82 MHz。2)五目多光谱成像设备选用美国Micasense公司生产的RedEdge™,供电为5V DC,尺寸为12.1 cm×6.6 cm×4.6cm,质量为150 g,可GPS定位。它有5个独立的成像器,分别配有特制的滤光片,可实时分离成红(668 nm)、绿(560 nm)、蓝(475 nm)、红边(717 nm)、近红外(840 nm)这5个波段,让每个成像器接收到精确波长范围的光谱。该滤光片能提供针对单一波段最大图像分辨率,像素为120万每波段,共600万。3)二维激光扫描仪选自从德国SICK公司进口的LMS111-10100,工作电压为10.8~30 V DC,尺寸为105 mm×102 mm×162 mm,质量1.1 kg。它在工作时可进行270°旋转扫描,角度分辨率为0.25°,扫描频率为50 Hz,数据传输率达到100×106bit/s。它采用多脉冲回波原理,通过红外线(905 nm)光源扫描,最远可达到20 m的检测距离,针对10%反射率的黑色物体可达到18 m,能够识别任何形状的物体。
2.2 运动控制模块
该模块选用台达DVP40EH00T3型号的PLC作为主控制器,工作电压是24 V DC,由开关电源供给。PLC通过控制龙门架移动配合完成图像数据的自动采集功能。电机控制柜实物图如图2a所示,左边为PLC现场布置图,右边为装在PLC外面的人机交互界面。PLC的控制结构图如图2b所示,其中伺服驱动器选用台达ASD-A2- 2023-L,电机选用台达ECMA-E11320RS,供电电压都是48V AC,由外接220V AC通过交流变压器进行转换。PLC先传送信号给伺服驱动器,驱动器通过输出占空比控制左右两边电机进行行进,电机带动龙门架通过地上布设的相应轨道进行同步运动。同时,PLC结合台达公司的组态软件DOP-B1OS411开发人机交互界面,实现手动控制龙门架开始、前进、后退、距离设置、电机转动频率、故障复位功能。在自动控制程序出现故障或需要微小变动时,可以改为手动模式。
2.3 测控平台
测控平台完成图像数据的自动采集与存储功能,系统中的硬件连接如图3所示。各个成像传感器与上位机主要通过网线进行连接,其中的2个RGB摄像头CV-h200c要先通过摄像头专用线转接到视频控制器CV-5701上,然后和其他成像传感器一起经过交换机连接到上位机。上位机通过对各个传感器的ip地址进行访问,完成各个成像传感器的自动图像数据采集。同时,上位机通过RS485总线与PLC连接,采用ModbusRTU通讯协议与PLC进行通信控制龙门架,因此保证了图像采集与龙门架运动的同步进行,可以在龙门架移动的时候准确监测到种植田内植株的生长信息。各个成像传感器采集到的图像数据信息都会自动存储在PC柜上位机中的指定文件夹。
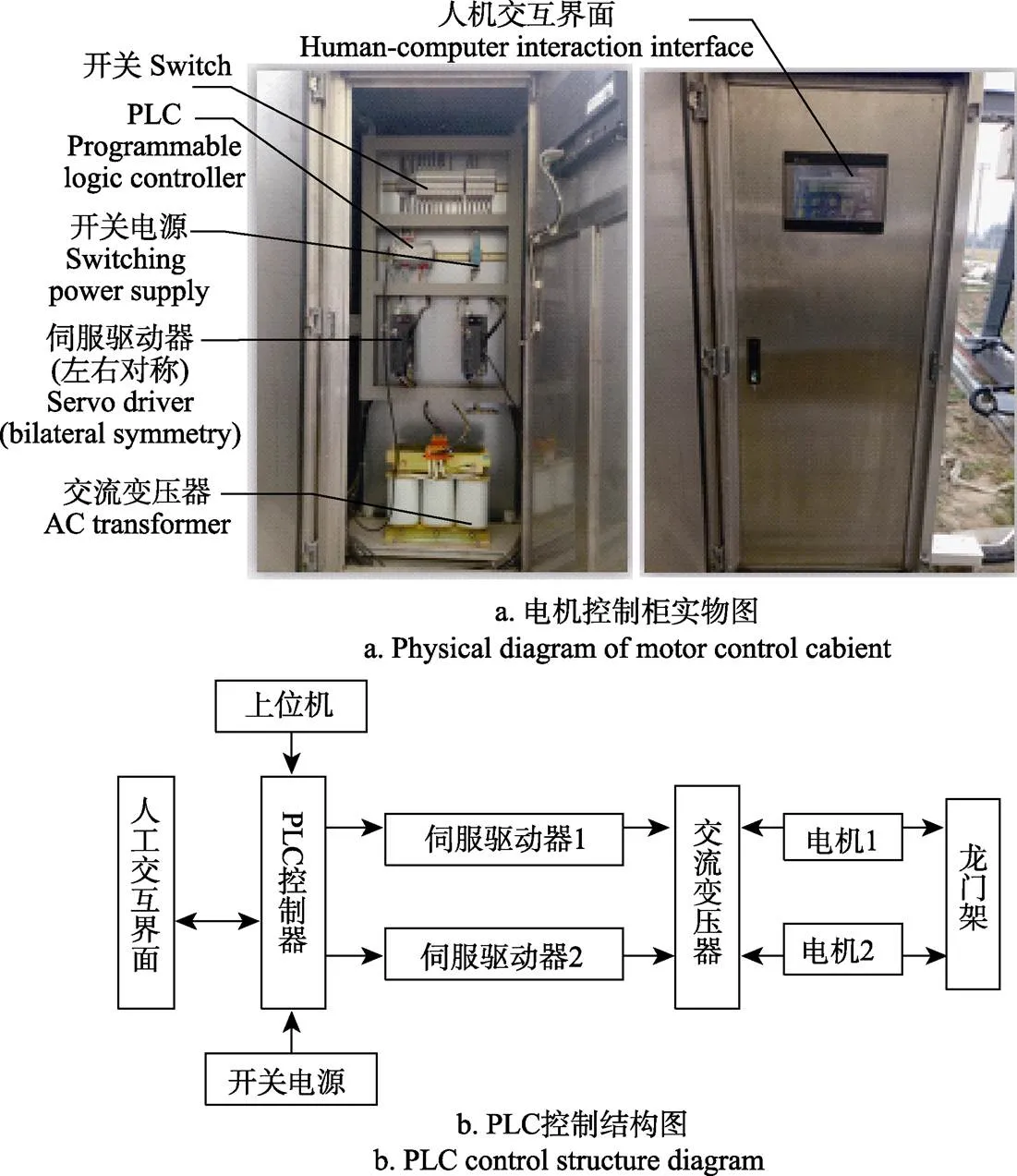
图2 电机控制柜及PLC控制结构图
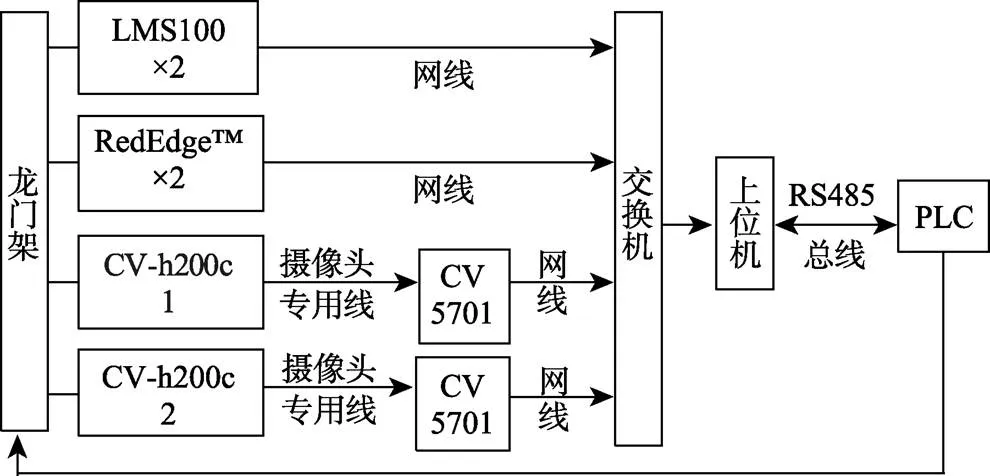
图3 系统硬件连接图示
3 软件设计
3.1 总体设计流程
整个系统的开发环境是Visual Studio2017,开发语言是C#,该软件控制流程图如图4所示。首先,程序开始,根据实际需求,设置时间定时,单独RGB和五目图像采集每隔5 s进行1次,激光扫描每隔1 s执行1次,试验测定龙门架单趟行走所用时间为142 s。整个系统完成工作需要上位机和PLC的联合控制,上位机开始工作,同时打开与PLC的串口通信,才能保证龙门架移动与传感器采集图像数据信息同时进行。RGB和多光谱成像传感器根据各自的通信协议获取图像,激光扫描仪根据通信协议获取点信息后还要进行转化才可得到植株位置高度信息。待龙门架开始返回时,各传感器停止图像数据采集,龙门架回到原点,结束1个周期的采集工作。
该软件运行界面截图如图5所示,左边主要是上位机与PLC通信进行的参数设置,“单趟行走距离”显示龙门架所行进的路程,“单趟时间”用来控制龙门架单趟行走返回原点的时间,“写入脉冲数”用来控制龙门架单趟行走返回原点的路程,“单趟行走时间”和“写入脉冲数”相互制约,以其中龙门架行走距离较短的参数设置进行执行,当时间和脉冲设置行走都超出底部轨道的长度时,在轨道的尽头有限位开关停止龙门架行走,通过人机交互界面的“故障复位”恢复,然后手动返回。
在设置好参数后,点击“锁定设置”、“完整扫描”龙门架自动前进,同时各成像传感器采集图像数据信息自动保存,单趟行走结束后自动返回原点。
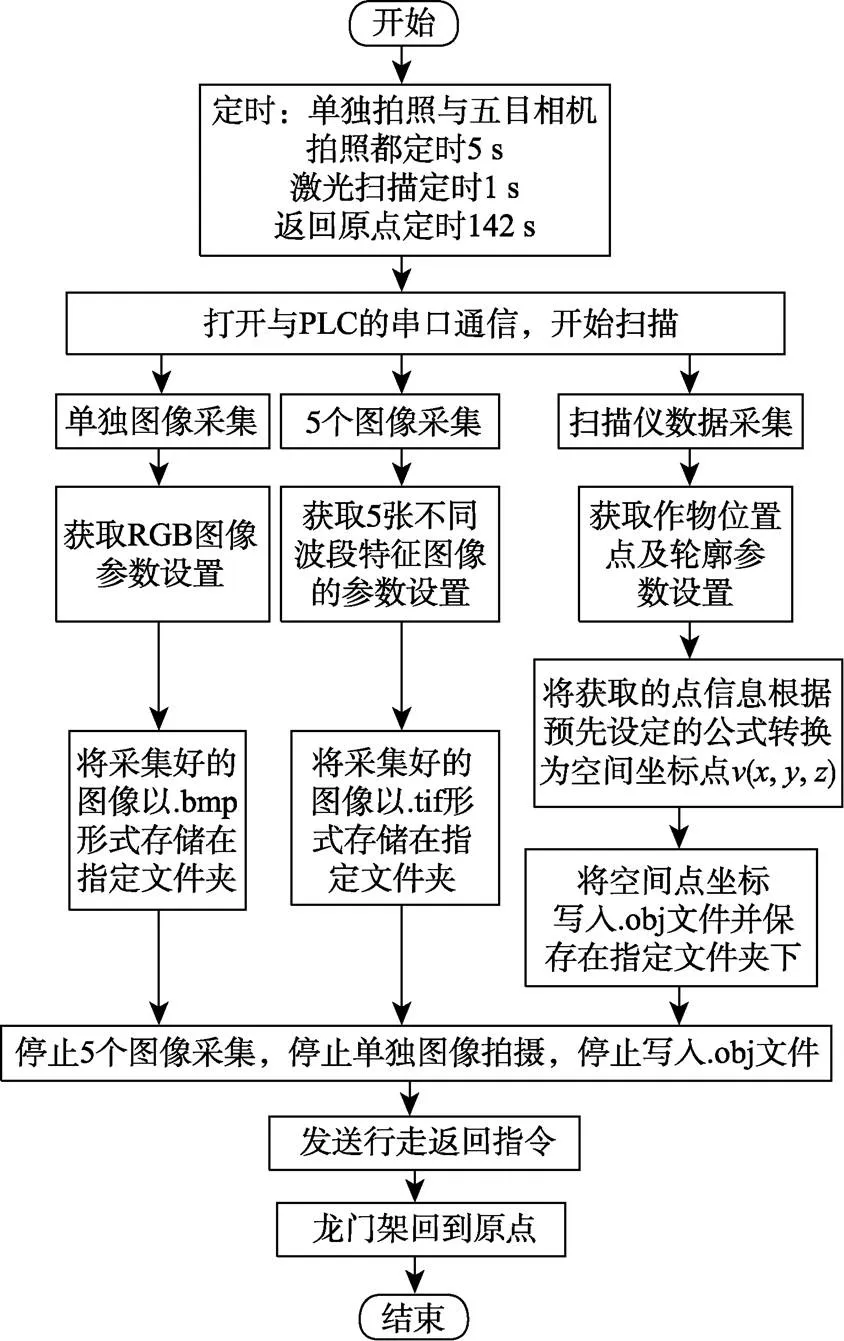
图4 软件控制流程图
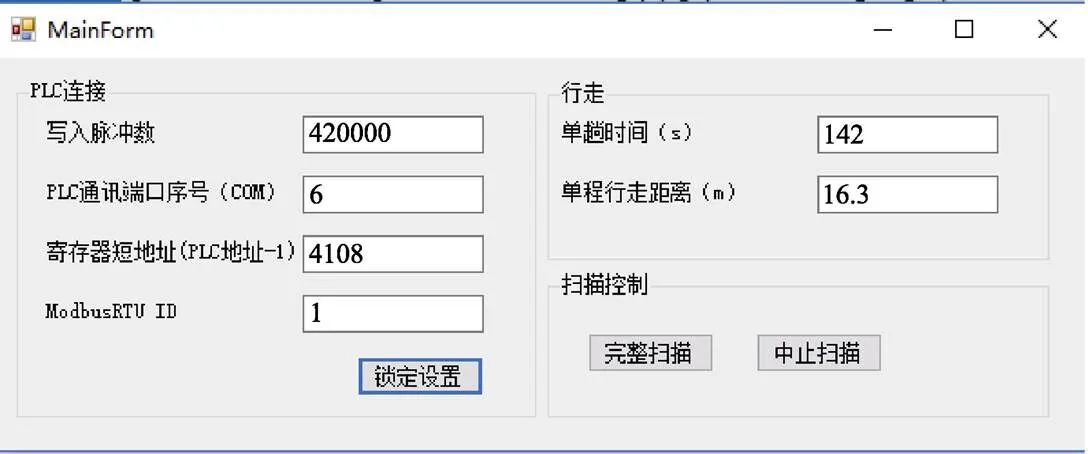
图5 软件运行界面截图
3.2 表型原始图像获取
这3个传感器都是基于TCP/IP进行通信,但是又有各自的通信协议。
3.2.1 RGB原始图像获取
RGB高速彩色相机与上位机通过自定义协议进行通信。首先上位机发送给传感器1个指令“BC,CM ”,则传感器会返回1串字符,其中有效字符串为“BC、图像数据长度、图像数据”,所以在返回的字符串中找到以BC开头的字符串,其中的第3个字符即是捕获到的RGB图像,然后进行存储即可。创建1个data文件夹,以时间格式yyyy-mm-dd-hh-mm-ss将图像存储为.bmp格式,方便随时查看。
3.2.2 多光谱原始图像获取
多光谱相机通过HTTP协议与上位机进行通信,根据通信协议,上位机发送1个指令信息“http://192.168. 1.83/capture?cache_raw=31&block=true”给传感器请求获取数据,传感器收到信息后会返回5个不同波段的图像信息并以json格式存储在传感器中,上位机对传感器中的图像进行复制并存在创建好的data文件夹中,对于采集到的红、绿、蓝、红边和近红外5张不同波段的照片在名称前加上序号0~4进行区分并以时间格式yyyy-mm- dd-hh-mm-ss存储为.tif格式。
3.2.3 激光扫描仪原始数据获取
二维激光扫描仪与PC进行通信是通过cola A通信协议。根据协议,上位机发送给传感器1个十六进制形式的电报结构sRN LMDscandata,则传感器会给上位机返回1个字符串,在返回的字符串中寻找有效字符sRA LMDscandata,从它开始以空格为单位,26个字符开始一直到字符串结束就是扫描到的有效的点数据,上位机对这段有效点数据进行接收即可。这样,上位机得到的是一连串的植株点信息数据,还要将其转化为植株的位置信息和高度信息。
为了准确获取植株位置高度信息,需建立空间直角坐标系。由图1中的植物表型监测系统的实物图可以看到,系统的原始位置为靠近PC柜一端,然后沿着每个蒸渗仪的长从靠近PC柜的一端向另一端移动。以龙门架前进方向左边轨道方向为轴,龙门架在原始位置时横梁所对应在地面上的位置为轴,方向指向轴的对立面,轴和轴的交点为原点,竖直方向为轴,建立空间直角坐标系。经过测量,距离轴较近的激光扫描仪距离轴的垂直距离记为left,值为2.195 m,对应扫描的农作物为左边位置。另外一个激光扫描仪距离轴的垂直距离记为right,值为5.505 m,对应扫描的农作物为右边位置。激光扫描仪直接扫描到麦苗顶部的距离记为distance,光源为红外线,红外线朝向原点转动方向与水平方向的角度记为,扫描仪底端到地面的高度记为,为2.25 m。龙门架前进速度记为¢,前进时间记为,¢通过人机交互界面的“电机转动频率”来设置转换,通过程序设置计时得到。
则空间坐标:
左边:

右边
这样就可以得到空间点坐标(,,),确定了每座蒸渗仪上面所种作物的位置及植株高度信息。这些信息被写入.obj文件并按照时间格式存储在创建好的data文件夹下。对于左边的激光扫描仪存储格式为ScanL+ (yyyymmddhhmmss)+.obj,对于右边的激光扫描仪存储格式为ScanR+(yyyymmddhhmmss)+.obj。
4 系统测试及应用案例
4.1 运动控制测试及结果分析
在北京市昌平区小汤山国家精准农业研究基地,进行了运动控制测试。前期测定表明,龙门架单趟走完全程的脉冲是420 000,距离是16.30 m;当人机交互界面电机转动频率设置为0.56 rad/s时转动速度为0.111 m/s;在电机转动频率设为0.83 rad/s时转动速度为0.167 m/s。在这2种速度(0.111、0.167 m/s)设置下分别测试龙门架单趟行走全程16.30 m、1/2全程(8.15 m)、1/4全程(4.08 m)所用的时间,计算实际转动速度。所有试验重复3次,取其平均值。
4.2 表型数据采集与处理方法
4.2.1 信息采集方法
传感器拍照及采集数据的频率可以通过软件程序进行设置。本系统中根据实际需求,在电机转动频率设置为0.56 rad/s时,设置RGB和多光谱成像传感器每隔5 s采集1次,激光扫描仪每隔1 s扫描1次。则系统每运行1个周期,可以采集到28张RGB照片及28组多光谱照片,能够获得整块农作物生长信息;激光扫描仪在1个周期内可以得到整块作物的位置高度信息,满足当前需要。系统每运行1次,即可采集到左右2排,24座蒸渗仪上所种作物,总面积为18 m2的表型图像信息。
由于对每座蒸渗仪上种植作物所获取的表型信息的分析处理过程都一样,所以,此处只选择其中1座编号为1的蒸渗仪上所种作物的表型信息为例进行分析。单座蒸渗仪长为1 m,宽为0.75 m,种植面积为0.75 m2。选取试验期间所种植的2种作物冬小麦和夏玉米为例进行分析,其中冬小麦种植周期为2017年10月—2018年6月,夏玉米种植周期为2018年6月—2018年10月。
4.2.2 日蒸散量及作物日覆盖度估计
对于RGB图像的分析,以冬小麦为例,主要通过覆盖度的计算,对冬小麦的日蒸散量进行估计。
根据气象站数据,假设利用彭曼公式(Penman-Monteith equation,PM)计算参比蒸散(reference evapotranspiration,ET)[28]。

气象站数据每1 h获得1次,则根据气象站所测得的数据,包括空气温度、空气湿度、大气压、总辐射、日降雨量、风速、风向,通过彭曼公式,即可算出每小时的参比蒸散,最后进行累加即为每日的日参比蒸散。
称重式蒸渗仪会自动连续记录各个小区土体质量变化。试验期间, 通过在每个蒸渗仪上增减铅块的方法,得到关于质量-电压的标准曲线, 最终计算出冬小麦实际耗水量(actual evapotranspiration,ET)。

式中ET为小麦实际蒸散,mm/d;为常数,Δ为1 d内电压的变化值,mV;为每个蒸渗仪小区面积,m2。
根据实际情况,所选用的1号蒸渗仪的质量-电压的标准曲线公式为


作物系数(crop coefficient,K)为

将K与对应时间的日覆盖度值做拟合,可得到日覆盖度与K之间关系。通过对2018年3—5月,在北京市小汤山基地采集的冬小麦图像信息进行处理,得到冬小麦日覆盖度与作物系数关系可以表示为

式中为日覆盖度。决定系数2为0.95,均方根误差(root mean square error,RMSE)为0.157。由于K是一个增函数,所以式(9)零点为0.127 1,表示当覆盖度低于12.71%时,计算出来的作物系数为负,不再适合用于估计日蒸散量。
由此,通过表型图像的日覆盖度便可推测出冬小麦的土壤-作物系数K,结合气象数据计算得到的参比蒸散ET,便可以估计出冬小麦的实际蒸散量ET。
作物日覆盖度的计算:1)图像采集:北京市昌平区小汤山国家精准农业研究基地,选取编号为1的小型蒸渗仪上所种植冬小麦的RGB图像进行分析,计算覆盖度,试验时间为2017年10月—2018年5月。2)采用软件MATLAB R2017a进行图像分析,以图6所示的于2018年10月20日采集到冬小麦的RGB图像为例说明覆盖度的计算方法。首先,通过函数imread()读入图像,然后通过语句I1(i,j,2)>1.1*I1(i,j,1) && I1(i,j,2)>1.1*I1(i,j,3)提取出图像中绿色分量大于红色分量并且绿色分量大于蓝色分量的部分,则可以把图像中作物部分进行分割。利用分割后的灰度图像,计算作物部分的像素点数占整个图像的像素点数的比例,即为所研究区域内植被的覆盖度。对于图6所示作物的RGB图像,程序运行,得到作物的覆盖度为12.22%。
4.2.3 多光谱图像信息采集与处理
根据作物的多光谱图像可以计算出各种作物指数,计算常用的作物指数:归一化差异植被指数(normalized difference vegetation index,NDVI)、差异环境植被指数(difference vegetation index,DVI)、比值植被指数(ratio vegetation index,RVI)、归一化差异绿度指数(normalized difference green index,NDGI)。

图6 冬小麦RGB图像

式中NIR、、分别为多光谱图像近红外、红光、绿光波段反射率数值。
计算各个指数值时同样使用软件MATLAB R2017a,首先,通过imread()函数读取进行指数运算所需要的多光谱图像,分别对图像根据以上公式进行计算,即可得到作物的各种指数图。利用[m,n]=size()函数得到图像矩阵的行数、列数,通过for循环累加得到指数图所有的像元亮度值(digital number,DN),,/(m*n)即为整个指数图中DN的平均值。通过max()和min()函数可以得到指数图中DN值的最大和最小值。
4.3 结果与分析
4.3.1 运动控制测试结果
不同速度设置下的电机实际转动速度如表1所示。可以看出,实际平均转动速度与设置的速度的相对误差在1.8%~6.0%之间,不会影响到整个系统采集表型图像数据信息,表明该运动控制系统的控制性能比较准确。
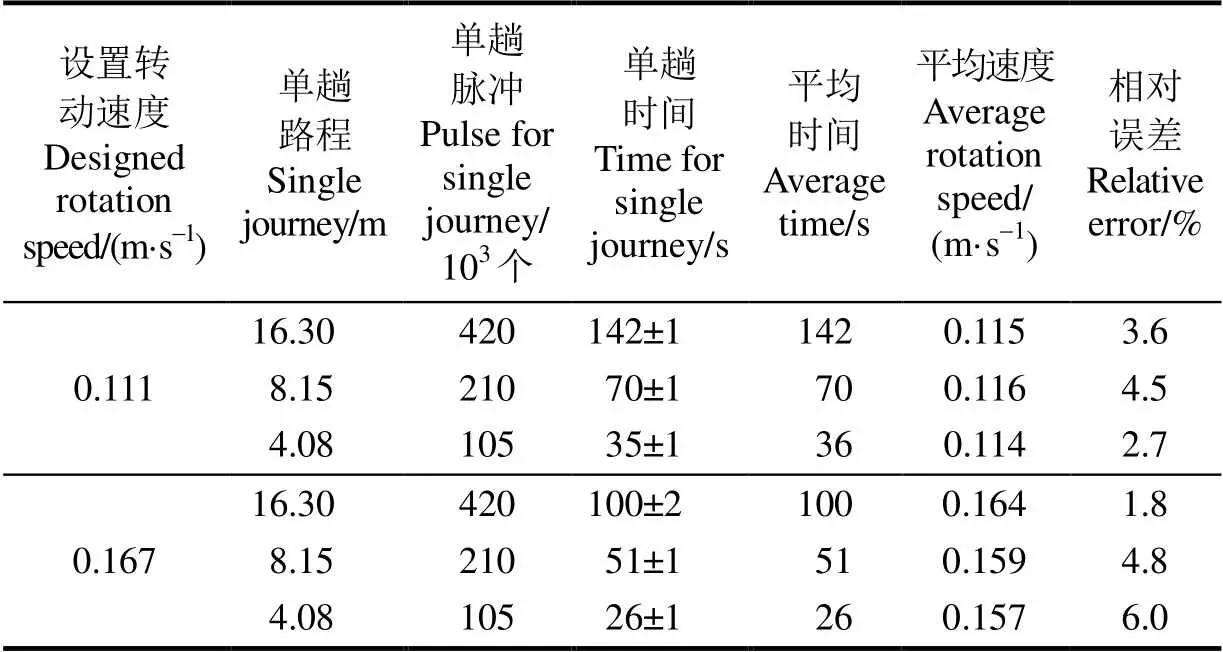
表1 电机转动速度测试结果
4.3.2 蒸散量估算结果
在2018年3—5月,平均每隔10 d采集1次冬小麦作物的RGB图像信息,每天早中晚各采集1次,计算出平均日覆盖度,计算出作物系数,与气象站数据计算出冬小麦作物的参比蒸散相乘即可得到冬小麦作物的估计蒸散量,与蒸渗仪得到的实际蒸散量进行对比。试验期间,冬小麦作物的日覆盖度、作物系数、参比蒸散量、估计蒸散量、实际蒸散量数据如表2所示。从表2可以看出,在小麦主要耗水期3—5月相对误差减小,在15%~20%之间,平均相对误差为16.62%。可见,利用表型图像信息对小麦生育期进行蒸散量的估计是可靠的。

表2 冬小麦返青后实际与估计蒸散量对比
4.3.3 作物植被指数
于2018年6月25日早上采集到的夏玉米作物的蓝、绿、红、近红外、红边多光谱图像,如图7所示,以此为例计算常用的作物指数,结果见表3。在植被遥感中,NDVI的应用最为广泛,是植被生长状态及植被覆盖度的最佳指示因子。差值植被指数应用较少,但它对土壤背景的变化极为敏感,有利于对植被生态环境的监测。比值植被指数RVI能增强植被与土壤背景之间的辐射差异,RVI是绿色植物的一个灵敏的指示参数,它与叶面积指数、叶干生物量、叶绿素含量相关性高,被广泛用于监测绿色生物生物量。归一化差异绿度指数可用来对不同活力植被形式进行检验。
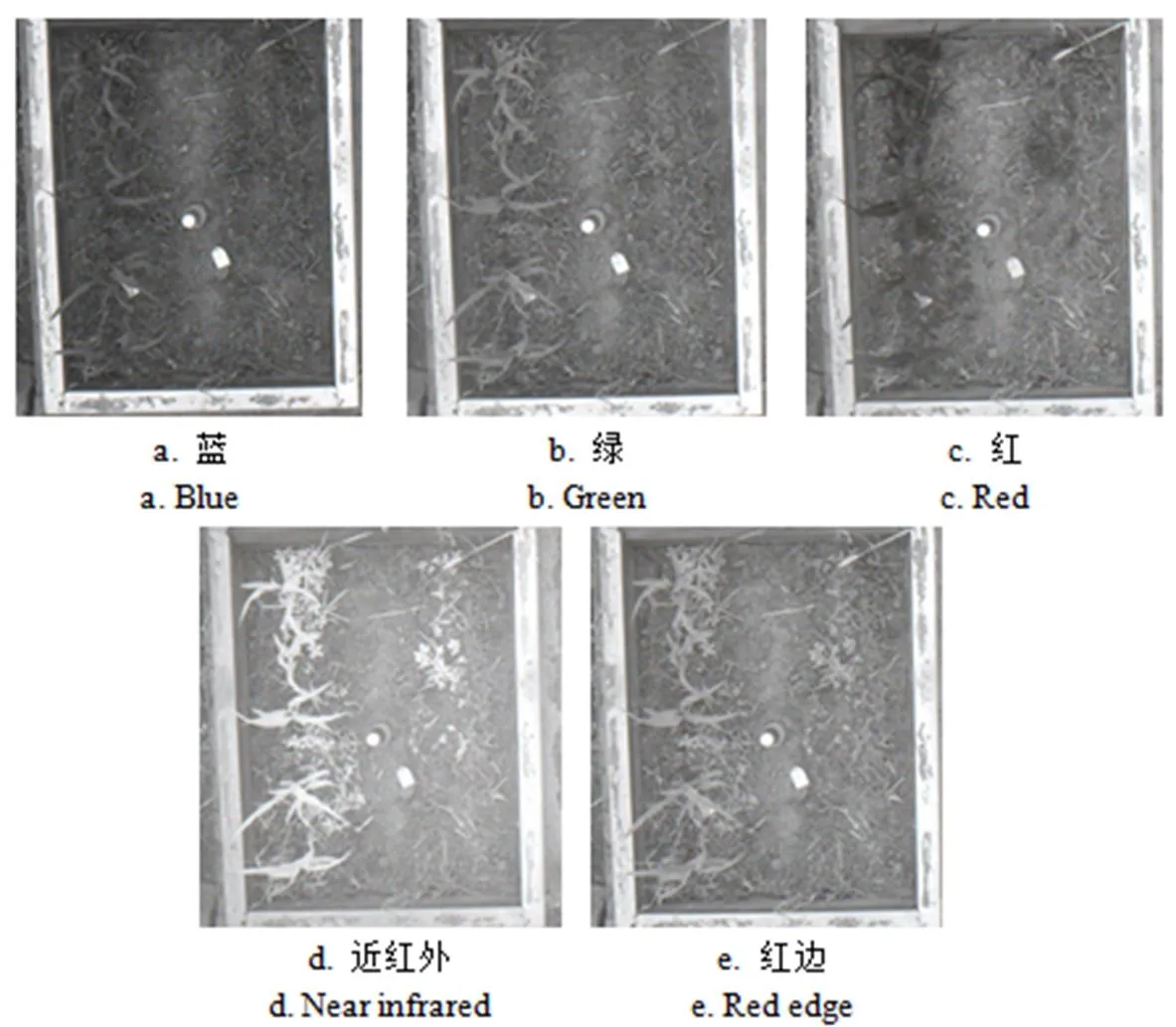
图7 夏玉米多光谱图像

表3 夏玉米指数计算值
除此之外,利用多光谱图像还可以计算作物的转换型植被指数,红色植被指数,土壤调整植被指数等,获取更多作物信息。
4.3.4 作物二维激光扫描仪数据采集与处理
以编号为1的蒸渗仪种植的夏玉米为例分析二维激光扫描仪获取到的植株高度信息。图8a为夏玉米的原始RGB图像,图8b为通过MATLAB R2017a分析得到的夏玉米的等高线图。首先,通过函数load('E:matlab qtfyt1.txt');读取所获得的作物数据信息的文本文档,通过=qtfyt1(:,1);=qtfyt1(:,2) ;=qtfyt1(:,3)。以矩阵的形式获得每个点信息的坐标,通过函数contourf(),即可得到如图8b所示的生长等高线图。等高线图中,1.9~2.5 m为轴,表示该蒸渗仪宽的两端,一边距离原点1.9 m,另一边距离原点2.5 m;0.2~1.4 m为轴,表示该蒸渗仪的长的两端,一边距离原点0.2 m,另一端距离原点1.4 m;通过的坐标即可知道该座蒸渗仪在整个大田的位置。图8a所示RGB图像中,竖直方向为轴,水平方向为轴,与图8b所反映的等高线图互相对应。用等高线表示该块种植田内作物的实际高度和高低起伏的地图,光标点到某一个位置时都可以显示出该位置的高度信息。根据图8b的图例可以看出每个区域的高度信息,可见整体长势从黄、绿到蓝、紫的高度依次为0.09、0.06、0.03、0.01 m,逐次递减,对应等高线图中可以看出整体趋势左边偏高,右边偏低,和图8a的RGB图像高度信息吻合,为作物生长状况提供了指导。
4.3.5 其他表型参数获取
利用表型图像信息还可以获得别的表型参数,比如叶面积、叶片尺寸等。通过前人研究,可以应用改进网格搜索算法参数优化后的支持向量机对获取的表型图像进行训练,以作物叶片长度、叶片最大宽度、叶面积回归拟合值作为输入变量对作物叶面积进行预测[28]。还可以通过形态学运算和边缘检测方法对复杂背景下的重叠叶片进行识别[29]。或者根据Chaki 等[30]提出的分层结构,每层根据本身的特征组处理特定类型的视觉特点来识别不同植物类型数字叶片图像。
蒸渗仪测量精度高,但是造价也高[31]。该表型监测系统通过RGB图像信息对作物蒸散状况进行实时估测,为传统蒸渗仪监测耗水提供了可靠的装备与技术支撑,同时,还可以通过其他传感器监测到作物的各种表型信息。通过系统集成与试验,该系统具有测量面积大、响应速度快、可扩展性强及成本低、无接触无损伤等优点,为作物的蒸散状况及生长状态提供指导。然而,初步集成构建系统能够可靠获取相关数据和参数,但深层的信息挖掘与处理还未进行,需要在其他表型信息获取及图像融合等方面开展进一步研究工作。

图8 夏玉米RGB与等高线对比图
5 结 论
本文在已有小型称重式蒸渗仪的基础上,集成了RGB成像传感器、多光谱成像传感器、及二维激光扫描仪于一体,配合龙门架进行移动控制,构建了称重式蒸渗仪植物表型监测系统,实时获取各种作物的表型图像数据信息,实现作物生长过程中的各种可见与不可见光图像信息和植株高度信息的自动监测。经测试,系统运行速度可靠、准确,速度相对误差在1.8%~6.0%之间。
此外,本文提出将表型数据、气象站数据、蒸渗仪数据结合在一起,不仅能够大面积估算作物蒸散量,还能够获取各种作物指数、株高等信息。通过对获取的夏玉米多光谱图像和激光扫描仪数据信息分析,可靠获取了归一化差异植被指数等作物指数及植株高度信息。并结合气象站数据,对冬小麦的主要耗水期RGB图像分析获取其估计蒸散量,与蒸渗仪获取的实际蒸散量对比,其平均相对误差为16.62%。通过集成与试验,该系统具有测量面积大、响应速度快、可扩展性强、无接触无损伤及成本低等优点,为大面积作物蒸散量的实时监测和精确诊断以及作物生长状况研究提供有效技术与装备支撑,达到了预期效果。表型组学是未来研究与应用的关键领域,通过表型分析来描述关键性状可以为育种、栽培和农业实践提供基于大数据的决策支持。该系统可为表型组学的研究提供了有效地装备与技术数据支撑。但是,系统初步集成,未来还需要在表型参数获取,比如叶面积指数、叶倾角、冠层结构等方面进一步研究,切实支撑中国各类作物表型研究发展。
[1] 郭春明,任景全,张铁林,等. 东北地区春玉米生长季农田蒸散量动态变化及其影响因子[J]. 中国农业气象,2016,37(4):400-407. Guo Chunming, Ren Jingquan, Zhang Tielin, et al. Dynamic change of evapotranspiration and influenced factors in the spring maize field in Northeast China [J]. Chinese Journal of Agrometeorology, 2016, 37(4): 400-407. (in Chinese with English abstract)
[2] 袁小环,滕文军,张辉,等. 实测草坪蒸散量评价P-M模型在北京地区适用性[J].农业工程学报,2018,34(7):147-154.
Yuan Xiaohuan, Teng Wenjun, Zhang Hui, et al. Appraised the applicability of P-M model in Beijing area by the measured evapotranspiration of lawn[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(7): 147-154. (in Chinese with English abstract)
[3] Feng Yu, Cui Ningbo, Zhao Lu , et al. Comparison of ELM, GANN, WNN and empirical models for estimating reference evapotranspiration in humid region of Southwest China[J]. Journal of Hydrology, 2016, 536: 376-383.
[4] Kumar J, Pratap A, Kumar S. Phenomics in Crop Plants: Trends, Options and Limitations[M]. India: Springer, 2015.
[5] Li Lei, Zhang Qin, Huang Danfeng. A review of imaging techniques for plant phenotyping[J]. Sensors, 2014, 14(11): 20078-20111.
[6] 金菊良,侯志强,蒋尚明,等. 基于单作物系数和遗传算法的受旱胁迫下大豆蒸发蒸腾量估算[J]. 黑龙江大学工程学报,2017,8(1):1-10,12. Jin Julian, Hou Zhiqiang, Jiang Shangming, et al. Estimation of soybean evapotranspiration under drought stress based on single crop coefficient and genetic algorithm[J]. Journal of Engineering of Heilongjiang University, 2017, 8(1): 1-10, 12. ( in Chinese with English abstract)
[7] 袁宏伟,崔毅,蒋尚明,等. 基于大型蒸渗仪和遗传算法的受旱玉米蒸发蒸腾量估算[J]. 农业机械学报,2018,49(10):326-335. Yuan Hongwei, Cui Yi, Jiang Shangming, et al. Evapotranspiration of drought-affected maize was estimated based on large scale evapotranspiration apparatus and genetic algorithm[J]. TCSAM, 2018, 49(10): 326-335. ( in Chinese with English abstract)
[8] 唐德秀,李毅,刘俸,等. 砂石覆盖条件下夏玉米蒸发蒸腾量的估算[J]. 灌溉排水学报,2018,37(7):50-60. Tang Dexiu, Li Yi, Liu Feng, et al. The estimation of evapotranspiration of summer maize under sand-covered condition[J]. Journal of Irrigation and Drainage, 2018, 37(7): 50-60. ( in Chinese with English abstract)
[9] 郭庆华,杨维才,吴芳芳,等. 高通量作物表型监测:育种和精准农业发展的加速器[J]. 中国科学院院刊,2018,33(9):940-946. Guo Qinghua, Yang Weicai, Wu Fangfang, et al. High flux crop phenotype monitoring: Accelerator for breeding and precision agriculture development[J]. Proceedings of the Chinese Academy of Sciences, 2018, 33(9): 940-946. ( in Chinese with English abstract)
[10] 康乐,王海洋. 我国生物技术育种现状与发展趋势[J]. 中国农业科技导报,2014,16(1):16-23. Kang Le, Wang Haiyang. Current situation and development trend of biotechnology breeding in China[J]. China Agricultural Science and Technology Guide, 2014, 16(1): 16-23. (in Chinese with English abstract)
[11] 吴建伟,卢大文,明博,等. 我国种业智能装备产业研究[J]. 中国农业科技导报,2014,16(6):68-73. Wu Jianwei, Lu Dawen, Ming Bo, et al. Research on China's seed industry intelligent equipment industry[J]. China Agricultural Science and Technology Guide, 2014, 16(6): 68-73. (in Chinese with English abstract)
[12] 丁海凤,于拴仓,王德欣,等. 中国蔬菜种业创新趋势分析[J]. 中国蔬菜,2015(8):1-7. Ding Haifeng, Yu Shuancang, Wang Dexin, et al. Analysis on the innovation trend of Chinese vegetable seed industry[J]. China Vegetables, 2015(8): 1-7. ( in Chinese with English abstract)
[13] Bourdais G, Burdiak P, Gauthier A, et al. Large-scale phenomics identifies primary and fine-tuning roles for crks in responses related to oxidative stress[J]. PloS Genetics, 2015, 11(7): e1005373.
[14] Humplík J F, Lazár D, Fürst T, et al. Automated integrative high-throughput phenotyping of plant shoots: A case study of the cold-tolerance of pea(L.)[J]. Plant Methods, 2015, 11(1): 20.
[15] Kirchgessner N, Liebisch F, Yu K, et al. The ETH field phenotyping platform FIP: A cable-suspended multi-sensor system[J]. Functional Plant Biology, 2017, 44(1): 154-168.
[16] Vadez V, Kholová J, Hummel G, et al. LeasyScan: A novel concept combining 3D imaging and lysimetry for high- throughput phenotyping of traits controlling plant water budget[J]. Journal of Experimental Botany, 2015, 66(18): 5581-5593.
[17] Andrade-Sanchez P, Gore M A, Heun J T, et al. Development and evaluation of a field-based high-throughput phenotyping platform[J]. Functional Plant Biology, 2014, 41(1): 68-79.
[18] Yang W, Duan L, Chen G, et al. Plant phenomics and high-throughput phenotyping: Accelerating rice functional genomics using multidisciplinary technologies[J]. Current Opinion in Plant Biology, 2013, 16(2): 180-187.
[19] 高宇,高军萍,李寒,等. 植物表型监测技术研究进展及发展对策[J]. 江苏农业科学,2017,45(11):5-10. Gao Yu, Gao Junping, Li Han, et al. Advances in plant phenotypic monitoring technology and its development strategies[J]. Jiangsu Agricultural Science, 2017, 45(11): 5-10. ( in Chinese with English abstract)
[20] Yang Wanneng, Duan Lingfeng, Chen Guoxing, et al. Plant phenomics and high-throughput phenotyping: accelerating rice functional genomics using multidisciplinary technologies[J]. Current Opinion in Plant Biology, 2013, 16(2): 180-187.
[21] 郭庆华,吴芳芳,庞树鑫,等. Crop 3 D:基于激光雷达技术的作物高通量三维表型测量平台[J]. 中国科学:生命科学,2016,46(10):1210-1221. Guo Qinghua, Wu Fangfang, Pang Shuxin, et al. Crop 3D: A 3D high flux crop phenotype measurement platform based on lidar technology[J]. China Science: Life science, 2016, 46(10): 1210-1221. ( in Chinese with English abstract)
[22] 胡鹏程,郭焱,李保国,等. 基于多视角立体视觉的植株三维重建与精度评估[J]. 农业工程学报,2015,31(11):209-214. Hu Pengcheng, Guo Yan, Li Baoguo, et al. Plant 3D reconstruction and accuracy evaluation based on multi -angle stereo vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(11): 209-214. (in Chinese with English abstract)
[23] 宋彦,谢汉垒,宁井铭,等. 基于机器视觉形状特征参数的祁门红茶等级识别[J].农业工程学报,2018,34(23):279-286. Song Yan, Xie Hanlei, Ning Jingming, et al. Qimen black tea grade recognition based on machine vision shape feature parameters[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(23): 279-286. (in Chinese with English abstract)
[24] 马浚诚,杜克明,郑飞翔,等. 基于卷积神经网络的温室黄瓜病害识别系统[J]. 农业工程学报,2018,34(12):186-192. Ma Juncheng, Du Keming, Zheng Feixiang, et al. A greenhouse cucumber disease identification system based on convolutional neural network[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 186-192. (in Chinese with English abstract)
[25] 贾伟宽,赵德安,阮承治,等. 苹果夜视图像小波变换与独立成分分析融合降噪方法[J]. 农业机械学报,2015,46(9):9-17. Jia Weikuan, Zhao De’an, Ruan Chengzhi, et al. Image wavelet transform and independent component analysis of apple night image fusion noise reduction method[J]. TCSAM, 2015, 46(9): 9-17. ( in Chinese with English abstract)
[26] Mulla D J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps[J]. Biosystems Engineering, 2013, 114(4): 358-371.
[27] Quan Long, Tan Ping, Zeng Gang, et al. Image-based plant modeling[C]// ACM Transactions Graphics(TOG). ACM, 2006, 25(3): 599-604.
[28] 宋文品,黄菁,陈晓丽,等. 地膜覆盖与常规灌溉对冬小麦耗水特征和产量的影响[J]. 中国生态农业学报,2016,24(11):1445-1455. Song Wenpin, Huang Jing, Chen Xiaoli, et al. Effects of plastic film mulching and conventional irrigation on water consumption characteristics and yield of winter wheat[J]. Chinese Journal of Ecological agriculture, 2016, 24(11): 1445-1455. (in Chinese with English abstract)
[29] Anjomshoae S T, Rahim M S M, Javanmardi A. Hevea leaf boundary identification based on morphological transformation and edge detection[J]. Pattern Recognition and Image Analysis, 2015, 25(2): 291-294.
[30] Chaki J, Parekh R, Bhattacharya S. Plant leaf recognition using a layered approach[C]//Microelectronics, Computing and Communications (MicroCom). IEEE, 2016: 1-6.
[31] 王子申,蔡焕杰,虞连玉,等. 基于SIMDualKc模型估算西北旱区冬小麦蒸散量及土壤蒸发量[J]. 农业工程学报,2016,32(5):126-136.
Wang Zishen, Cai Huanjie, Yu Lianyu, et al. Estimated winter wheat evapotranspiration and soil evaporation in northwest arid area based on SIMDualKc model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2016,32 (5): 126-136. (in Chinese with English abstract)
Design of crop phenotype and evapotranspiration monitoring system based on weighing lysimeter and multi-sensors
Liu Yanping1,2, Du Yali1,2, Nie Mingjun3, Xue Xuzhang2, Zhang Xin2※, Zheng Wengang3, Cui Kewang1,2
(1.300401,; 2.100097,; 3.100097,)
The measurement and estimation of evapotranspiration plays an important role in agriculture. In this study, we designed a plant phenotype and evapotranspiration monitoring system based on weighing lysimeter and multi-images. A total of 24 small weighing lysimeters, integrated RGB imaging sensors, multispectral imaging sensors and a 2D laser scanner were integrated witha gantry to control the movement in order to build weighing lysimeter plant phenotypic monitoring system, realizing automatic monitoring of RGB, red (668 nm), green (560 nm),blue (475 nm), the red edge (717 nm), near infrared (840 nm) image information and plant height information during plant growth period. Each lysimeter had the length of 1 m, a the width of 0.75 m and the depth of 2 m. The effective planting area was 0.75 m2. The total area was 18 m2. The intact soil was filled into the lysimeter. The lysimeter was equipped with data collecting system. The pressure signal was transformed into electrical signals. Wheather stations were installed to measure air temperature, air humidity, radiation, wind speed, precipitation, and the others. The phenotypic monitoring module was composed of RGB high speed color camera, 5-channel multi-spectral camera and laser scanner. The motion control module was of programmable logic controller in motor control cabinet in charge of moving ganty. The outside of programmable logic controller had the man-machine interaction interface. If the automatic control system failed,it could be manually controlled through the man-machine interaction interface. In this paper, phenotypic data, meteorological station data and lysimeter data were combined to not only estimate crop evapotranspiration in a large area, but also obtain various crop index and plant height information. The system was then tested at the designed normal speed and sampling frequency meeting the practical requirements. The results showed that the single journey time of the system was 142 s when the RGB and multi-spectral imaging sensor images were taken every 5 s, laser scanning once every 1 s. After a journey, the system could automatically collect 28 RGB and multi-spectral images, from which plant growth information could be derived. The obtained image data were stored in time format in a folder. During the motion control test, the single journey, time for single journey, pulse for single journey were recorded at designed motor rotation speed of 0.111 and 0.167 m/s. The relative error between the measured and the designed values was 1.8%-6.0%, indicating that the motion control performance was well. The system was used for estimation of evapotranspiration after seedling estimation of winter wheat. The RGB images were collected every 10 days. The average daily coverage and crop coefficient were calculated to calculate evapotranspiration. Finally, the estimated evapotranspiration had the relative error of 16.62% averagely, indicating the reliability of evapotranspiration estimation by the system. In addition, the acquired multi-spectral images and laser scanner data of summer maize were revealed, suggesting that the system could reliably obtain crop index and plant height information such as normalized difference vegetation index, difference vegetation index, ratio vegetation index, normalized difference green index, soil adjusted vegetation index and so on. In sum,this system integrated the lysimeter and multispectral images so as to provide an valuable technology and equipment support for real-time monitoring, accurate diagnosis of crop evapotranspiration and researches on crop growth status. In future, It is necessary to carry out researches on the acquisition of other phenotypic information and image fusion so as to obtain more crop information.
lysimeters; evapotranspiration; phenotype; monitoring; multispectral images; imaging system; image acquisition
2018-08-15
2018-11-10
国家重点研发计划(2016YFD0200608);北京市农林科学院科技创新能力建设专项(KJCX20170204);北京市农林科学院科研创新平台建设(PT2018-22)
刘艳萍,教授,博士,研究方向:通信及测控技术、信息智能处理。Email:liu13312181255@163.com
张 馨,副研究员,博士,研究方向:农业自动化。 Email:zhangx@ nercita.org.cn.
10.11975/j.issn.1002-6819.2019.01.014
S274.2;S161.4
A
1002-6819(2019)-01-0114-09
刘艳萍,杜雅丽,聂铭君,薛绪掌,张 馨,郑文刚,崔可旺. 基于称重式蒸渗仪及多种传感器的作物表型及蒸散监测系统研制[J]. 农业工程学报,2019,35(1):114-122. doi:10.11975/j.issn.1002-6819.2019.01.014 http://www.tcsae.org
Liu Yanping, Du Yali, Nie Mingjun, Xue Xuzhang, Zhang Xin, Zheng Wengang, Cui Kewang. Design of crop phenotype and evapotranspiration monitoring system based on weighing lysimeter and multi-sensors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 114-122. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.01.014 http://www.tcsae.org
