大众09G/09D自动变速器动力传递分析新思路
2019-01-15辽宁省农业经济学校冮地刘英男
辽宁省农业经济学校/冮地 刘英男
大众09G/09D型自动变速器是由日本爱信公司开发设计的前轮驱动的车型上代号为TF-60SN,后轮驱动的车型上代号为TR-60SN。09G/09D型自动变速器主要搭载于大众途锐、速腾、迈腾、高尔夫、途安和新甲壳虫等车型上。在动力传递结构方面是6AT中最具代表性的之一。
一、动力传递结构的基本分析
09G/09D型自动变速器的动力传递结构沿输入至输出方向上,分别有一个单级行星排和一个拉维娜结构,为便于表达,文中将其分别称之为前排和后段,如图1所示。
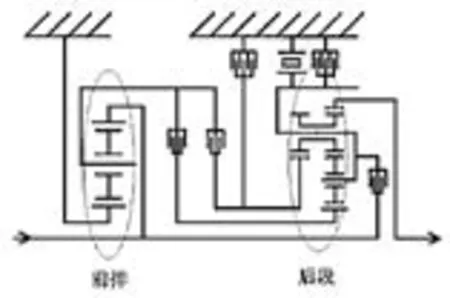
┃ 图1 09G/09D动力传递结构示意图
前排的齿圈与变速器输入轴一体可常获得输入轴速度1(输入轴速度为不变速,直接记为1),太阳轮为常固定状态,行星架为从动。根据当前的约束情况,可知前排行星架始终为减速输出,可将此速度记作↓0(↓为减速,角标0为非复合速度)。
后段属于使用齿圈作为从动元件的拉维娜变速机构。前排与后段之间连接点的数目不为1,这意味着前排与后段视作一个整体。
二、动力传递分析过程
1.执行元件的代号标注及筛选
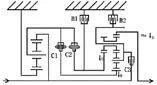
对09G/09D型自动变速器的动力传递结构简图,沿输入轴至输出轴方向依次进行执行元件代号标注,标注结果如图2所示。

┃ 图2 09G/09D执行元件的代号标注
仅分析动力挡时,应去除全部单向离合器F。所以筛选执行元件后,剩余执行元件为C1、C2、C3、B1、B2。
2.不同组合状态下的速度分析
根据各行星排之间的连接特征,前排无须换挡执行元件约束即可生成速度,而后段拉维娜结构则需要两个约束方可生成速度。所以说该变速器各动力挡的执行元件数目为2。
列出所有执行元件数目为2的10种组合,并对所有组合依次进行速度分析。
①C1C2
C1C2的工作可使前排的速度↓0传递至后段的大太阳轮和小太阳轮。按齿轮啮合原理进行速度分析可知,小太阳轮为顺时针(S)转动,驱动短行星轮逆时针(N)转动,短行星轮驱动长行星轮顺时针(S)转动,如图3所示。

┃ 图3 C1C2组合的约束下后段行星齿轮转向示意图
当前大太阳轮速度为↓0,长行星轮沿着大太阳轮的顺时针转动则会导致一体行星架会相对于大太阳轮做顺时针公转,此速度可简单记为S↓(即顺时针减速),同时大太阳轮提高此公转速度,可记为S↓+↓0,如图4所示。

┃ 图4 C1C2组合的约束下后段行星架速度示意图
此时再回到双级行星排中,我们发现小太阳轮依然顺时针旋转,但是一体行星架则处于一定的超速状态,所以公共齿圈的输出速度为轻微超速,可记作↓0+S↓↓0。该速度与常规↓0的速度差距较小,可近似视其为↓0,如图5所示。
┃ 图5 C1C2组合的约束及输出速度示意图
②C1C3
C1工作可使前排的速度↓0传递至后段的小太阳轮,而C3工作可使后段的一体行星架具备输入轴速度1。这样在拉维娜结构中,双级行星排的行星架以输入轴速度1作为主动元件,小太阳轮以↓0速度作为受限元件,则公共齿圈的整体输出速度为减速。但此时受限元件小太阳轮的顺时针旋转又会提高从动元件公共齿圈的转速,所以得到公共齿圈的输出速度为↓+(角标+,意味着当前复合速度比角标为0时有所提高),如图6所示。
┃ 图6 C1C3组合的约束及输出速度示意图
③C2C3
C2工作可使前排的速度↓0传递至后段的大太阳轮,C3工作可使后段的一体行星架具备输入轴速度。这样拉维娜机构中,单级行星排的行星架以输入轴速度1作为主动元件、大太阳轮以↓0速度作为受限元件,则公共齿圈的整体输出速度为超速。但此时受限元件大太阳轮的顺时针旋转会降低从动元件公共齿圈的转速,所以得到公共齿圈的输出速度为↑-(角标-,意味着当前复合速度比角标为0时有所降低),如图7所示。
┃ 图7 C2C3组合的约束及输出速度示意图
C1工作可使前排的速度↓0传递至后段的小太阳轮,B1工作可固定后段的大太阳轮。按齿轮啮合原理进行速度分析可知,长行星轮顺时针(S)转动(这与C1C2工作状态行星齿轮的转动状态下相似)。
此时大太阳轮固定,长行星轮沿着大太阳轮的顺时针转动会导致行星架会相对于大太阳轮做顺时针公转,如图8所示。

┃ 图8 C1B1组合的约束下一体行星架速度示意图
此时再回到双级行星排中,我们发现小太阳轮依然是顺时针旋转,而行星架则应是顺时针减速旋转的状态。
那么当前小太阳轮以↓0速度作为主动元件、一体行星架顺时针转动作为受限元件,则公共齿圈的整体输出速度为减速。受限元件一体行星架的顺时针旋转会提高公共齿圈的转速,所以得到公共齿圈的输出速度为↓0·↓+,如图9所示。

┃ 图9 C1B1组合的约束及输出速度示意图
C1工作可使前排的速度↓0传递至后段的小太阳轮,B2工作可固定后段的一体行星架,则拉维娜结构的双级行星排中,小太阳轮主动速度为↓0,一体行星架固定,所以公共齿圈的输出速度为减速,记作↓0·↓0,如图10所示。

┃ 图10 C1B2组合的约束及输出速度示意图
C2和B1的约束冲突。
⑦C2B2

┃ 图11 C2B2组合的约束及输出速度示意图
C2工作可使前排的速度↓0传递至后段的大太阳轮,B2工作可固定后段的一体行星架。此时拉维娜机构的单级行星排中,太阳轮主动速度为↓0,一体行星架固定,所以公共齿圈的输出速度为反向减速,记作↓0· r↓0(左侧符号r表示输出速度与输入速度方向相反),如图11所示。
⑧C3B1
C3工作可使后段的一体行星架具备输入轴速度1,B1工作可固定后段的大太阳轮。此时拉维娜结构的单级行星排中,一体行星架以输入轴速度1作为主动元件,大太阳轮固定,则公共齿圈输出速度超速,记作↑0,如图12所示。

┃ 图12 C3B1组合的约束及输出速度示意图
C2和B1的约束方式冲突。
⑩B1B2
当前约束方式下导致输出轴锁死。
3.速度标记的对比分析
由此总结出各速度标记,并按速度由低至高进行排列挡位,如表所示。

09G/09D自动变速器基本挡位排序及其相关说明
