无人艇航行安全控制系统设计与实现*
2019-01-14张建强
陈 霄,刘 忠,董 蛟,张建强
(海军工程大学电子工程学院,武汉 430000)
0 引言
无人水面艇(USV,Unmanned Surface Vehicle)作为一种小型水面智能任务平台,具有体积小、成本低、高速智能、雷达反射面积小、无人员伤亡等优势[1-2]。近年来,随着现代智能控制技术、导航技术、数据链技术、传感器等技术的进步,以及世界各国对海洋权益的要求日益强烈,USV在国内外呈现井喷式发展,被广泛应用于军事和民用领域[3-4]。
无人艇作为水面航行器,航行的安全性及可靠性是保证其任务顺利执行的首要保障。无人艇在复杂海况下执行任务的过程中可能会遇到诸多紧急情况,包括执行机构故障、动力系统故障、艇载任务载荷及传感器故障、通信干扰甚至中断等。目前,国内外关于无人艇航行安全控制系统的文献较少,主要措施是通过提高艇载设备的可靠性、综合应用冗余备份、故障诊断及数据融合等技术来提高无人艇的安全航行性能[5-6]。但是由于设备成本控制、安装空间受限以及技术途径有限等多重因素影响,现有提高无人艇航行可靠性的措施难以解决部分故障带来的重大损失,因此,分析无人艇航行过程中的主要安全隐患,设计并实现无人艇航行安全控制系统,对确保复杂海况下无人艇各项任务的顺利执行具有重要的现实意义。
1 无人艇航行主要安全隐患
本文研究对象主要是用于武器系统试验及训练任务,结合无人艇的应用情况,重点分析解决以下几种典型航行情况下的安全问题。
1.1 大航程航行
无人艇在大航程航行任务过程中,若出现遥测控系统链路干扰甚至中断、艇载设备机械或电气故障等情况,则很有可能失去控制而航行出预定航区,造成安全隐患。由于该无人艇航程较远,地面指挥中心实时判断故障的难度较大,无法准确判断无人艇的最后位置,如若航行出国境线则有可能引发政治问题。
1.2 高速小捷径供靶航行
在武器系统试验中,近距离高速小捷径甚至零捷径供靶已成为今后需要大量实施的试验项目。由于武器系统试验平台和无人艇的距离非常近,一旦航行偏差超出允许范围或者无人艇失控,则很有可能发生撞击事故。
1.3 被击伤仍能航行
无人艇为武器平台供靶试验或打靶训练过程中,被击伤后情况复杂,可能会导致其预定航线的改变,若此时遥测控链路及导航等设备失效,而航行控制系统仍能控制其继续航行,这时无人艇既不能按预定航线航行至指定区域,又不能通过基站遥控等方式控制,只能眼睁睁地看着它带来损失。
2 无人艇航行安全技术
提高无人艇航行控制系统可靠性,保障航行安全的技术措施主要分为以下几类:
1)提高无人艇艇载硬件设备、软件系统的可靠性。例如,采用余度技术,对艇载关键部件冗余备份,来保证系统的高可靠性[7]。目前由于艇载空间限制、成本控制等多种因素,特别是在消耗类、低成本无人艇上,受制因素较多,效果有限。
2)故障检测、监控与隔离技术。主要分为任务准备和海上航行两个阶段。在任务准备过程中,利用航行无实物及半实物仿真技术等来模拟任务的整个过程,实现对系统故障的判断和预测;在海上航行过程中,利用艇载导航设备、通信设备、各类传感器等艇载设备构建无人艇故障诊断系统,在地面指挥控制系统的辅助下,采取自主和人工相结合的方式实时解决航行中出现的故障。但是由于艇载设备数量较多、环境复杂,在无人艇航行过程中,故障模型很难构建,导致故障监控与隔离实现难度较大[8-9]。
3)安全防护技术。无人艇采取的防护措施主要包括设备安装布置和重要部件防护。设备安装布置指的是将关键设备、关键线缆布置在不易受到破坏的位置;重要部件防护主要指防雷电、电磁干扰等技术手段,即通过将关键的设备、线缆等封装隔离,避免受到其他艇载设备和线缆以及外部环境的电磁干扰。防雷电和电磁干扰可通过地面试验和测试来检验和提高防护等级。此外,还可利用光纤电传技术,隔离各通道间的电磁干扰[10]。但是,无人艇在执行任务过程中受到自身设备故障和复杂海洋环境干扰(雷电、风浪流、海杂波等)的影响,尽管通过采取上述技术组合可以提高无人艇航行控制系统的可靠性,但都是有限的,不能确保绝对的安全性[11-14]。为了确保无人艇高效可靠地执行各种航行任务,除了采用上述技术提高航行安全以外,需解决无人水面艇极端状况下出现的安全隐患,尤其要解决无人艇在失去控制的情况下,航行出安全区域给地面及海上目标带来的威胁这一问题。
3 安全控制系统总体设计方案
3.1 系统组成
无人艇航行安全控制系统包括艇载安控器、地面安控设备以及仿真测试系统等组成,系统组成框图如下页图1所示。
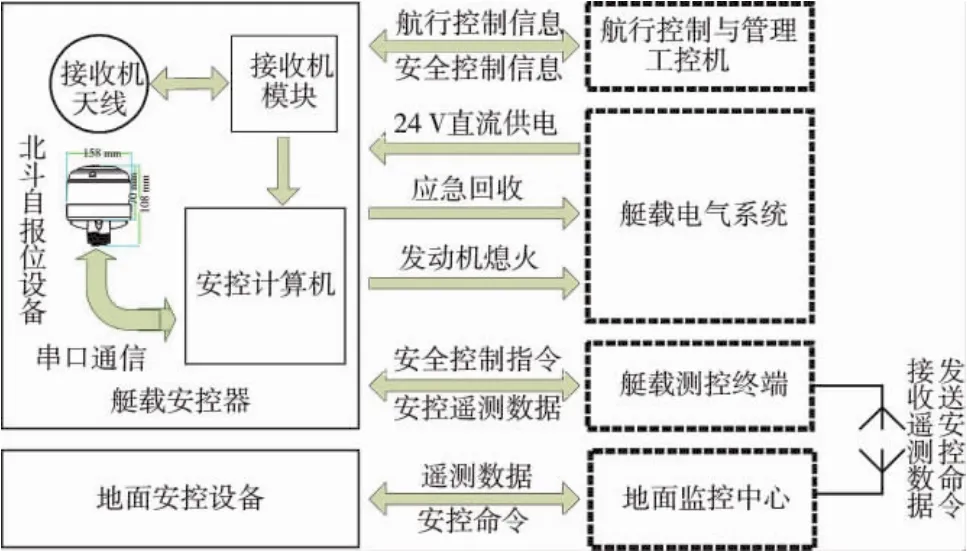
图1 无人艇航行安全控制系统组成
3.2 工作原理
该系统与无人艇其他艇载设备进行信息交互,通过获取导航数据实时判断无人艇是否超出安全区域,可实现艇上完全自主式安全控制和“人在回路”的地面被动安全控制两种安控方式。根据航行过程中出现的不同状况,系统采取其中一种或两种同步执行的安控方式来消除安全隐患。
3.2.1 艇上自主安控方式
艇上自主安控方式指的是在无人艇航行过程中,由艇载安控设备和其他艇载设备如航行控制与管理计算机、艇载电气系统等按照预设的控制策略对无人艇的实时状态进行连续监控和判断,当满足预定条件时,无需地面指挥员参与,自主执行预设的安全控制指令,消除潜在安全隐患。工作原理如图2所示。
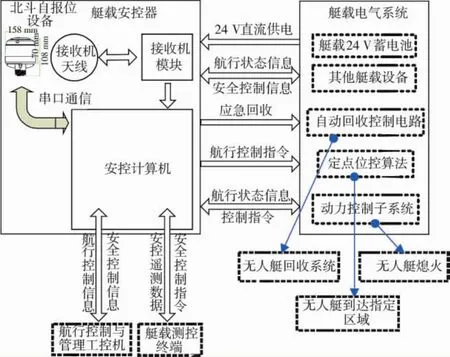
图2 艇载自主安控方式工作原理图
3.2.2 地面被动安控方式
地面被动安控方式指在无人艇航行过程中,由机载安控器、地面测控中心、地面安控设备以及指挥员构成一套人在回路的被动安控体系。地面指挥员对无人艇航行数据进行实时、连续监控和判断,当无人艇出现异常情况时,根据预定的策略,操作地面设备发送指令至艇载安全控制器,控制无人艇执行预定的动作,以保证无人艇及航区内重点目标的安全。工作原理如图3所示。

图3 地面被动安控方式工作原理图
3.3 安控执行策略
3.3.1 关键概念说明
可航区:根据任务要求、任务海域及无人艇最大航程限制,无人艇的可航行区域;
预设航线:无人艇执行任务前预先规划并下载至艇载航行控制计算机的期望航线;
安控判断线:执行任务前,由指挥员在基站控制系统上预先设定、并下载至艇载在安控计算机由经纬度数据确定的位置点组成的封闭区域曲线;
安控预警线:安控判断线确定后,艇载安控器自动生成一条封闭的向内沿径向距离为100 m(根据不同无人艇的自身性能而定)的封闭区域曲线。

图4 安控概念示意图
3.3.2 执行策略
无人艇若出现通信链路中断无法执行地面指挥中心控制指令、导航系统失效、舵机执行机构卡死等情况,导致无人艇完全失控,很有可能造成重大损失,因此,有必要在无人艇执行任务前,制定详细而周密的安全控制执行策略,消除安全隐患、确保任务的顺利完成。
安控执行以自主安控为主、被动安控为辅。具体流程如下页图5所示。
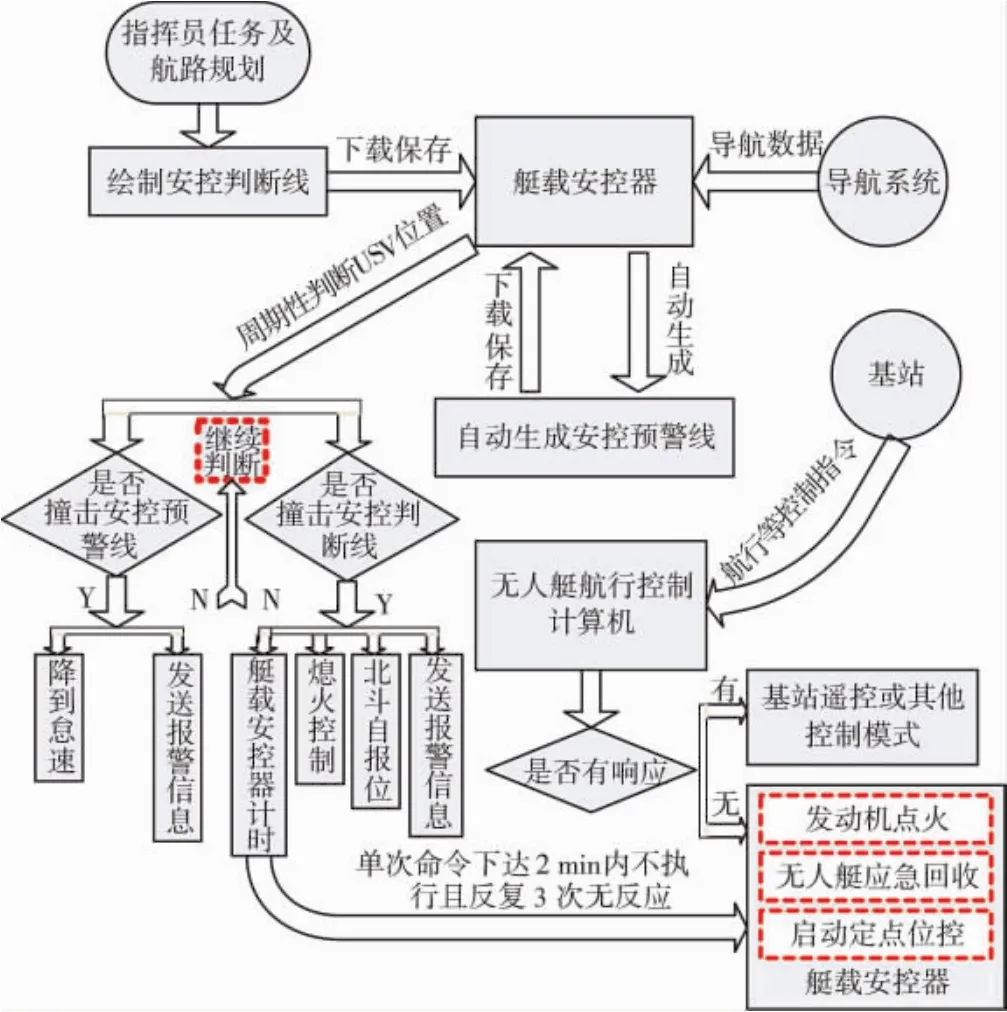
图5 安控策略执行流程图
指挥员根据特定任务要求,规划出无人艇的期望航行路径并设定航行中需要在特定地点执行的任务序列;根据期望航行路径和特定海域的具体情况绘制安控判断线并下载至无人艇航行控制计算机;根据设定好的安控判断线,艇载安控器自动生成安控预警线;艇载安控器实时获取导航系统提供的数据,并且间隔2 s周期性地对无人艇的位置进行判断,判断无人艇是否在安控预警线和安控判断线以内,当无人艇“撞击”安控预警线时,艇载安控器将会向艇载航行控制计算机发送速度控制指令,将无人艇速度降到怠速,同时通过无线通信链路向地面安控设备发送报警信息;当无人艇“撞击”安控判断线时,艇载安控器将向无人艇动力控制系统发出熄火控制命令,并通过北斗自报位子系统周期性地将自己的实时位置通过卫星链路发送给指挥中心,同时向地面安控设备发送报警信息;指挥员接到报警信息且停用安全航行区域控制功能后,可向无人艇下达点火及航行控制命令,若单次命令下达2 min内不执行且反复3次无反应则判定无人艇失控。这时艇载安控器控制发动机点火,自主执行定点位控或应急回收命令,即使动力系统损坏导致无人艇无法点火继续航行,但此时无人艇处于熄火状态,并且可通过艇载北斗短报文自报位系统获取无人艇的实时位置,确保了无人艇的安全且便于搜寻该故障无人艇。
3.4 核心算法
将无人艇是否在安控预警线及安控判断线内的问题抽象为判断点与多边形的位置关系,引入射线法判断无人艇是否处于安全区域内,射线法的基本原理参见文献[10]。判断无人艇是否位于安全航行区域内的算法流程具体如下:
1)获取无人艇坐标P、安控预警和安控判断区域多边形的顶点坐标 Q1、Q2、Q3等和 D1、D2、D3等;
2)以P为起点,沿铅垂线方向作射线l;
3)判断射线 l与多边形各顶点坐标 Q1、Q2、Q3等和D1、D2、D3等是否相交;若有交点,则判断该顶点为多边形两边的左端点还是右端点,若为左端点则判定为交点,若为右端点则舍弃;
4)循环取得安控预警和安控判断区域多边形的每一条边且判断是否平行于铅垂线,如果平行则忽略;
5)判断射线l与安控预警和安控判断区域边界的各边是否有交点,如果有则交点数分别递加1;
6)判断交点总数N1和N2的奇偶性。若N1和N2均为奇数,则判定无人艇处于安控预警线以内;若N1为偶数且N2为奇数,则判定无人艇处于安控预警线以外、安控判断线以内;若N1和N2均为偶数,则判定无人艇处于安控判定线以外。
4 仿真及试验验证
4.1 仿真验证
在MATLAB平台下,采用随机投点法对上述算法进行仿真验证。设定投点数M=1 000,将安控判断区域分别设定为任意的四、八边形,当点在安控预警区域以内时,点显示为绿色,表示无人艇在可航区内;当点在安控预警区域以外且安控判断区域以内时,点显示为黑色,表示无人艇已“撞击”安控预警线;当点在安控判断区域以外时,点显示为红色,表示无人艇已“撞击”安控判断线。仿真结果如图7所示。

图6 四边形区域仿真结果

图7 八边形区域仿真结果
由仿真结果可以看出,该算法可满足以上安全控制执行策略的逻辑要求,并且正确率100%。
4.2 湖上试验验证
利用以上算法,基于Visual studio 2012软件平台开发无人艇安全控制程序并嵌入到无人艇航行控制系统中,通过实际湖上试验验证两种安控措施的有效性和可靠性。如图8所示,红色和蓝色箭头代表两艘正在湖上航行的无人艇,黄色代表安控预警线,黑色代表未启用的安控判断线,启用后将变为红色,如图9所示。任务开始前,操作人员将安控判断多边形区域顶点的经纬度信息下载至艇载安控器,艇载安控器自动生成安控预警区域多边形,当无人艇通过人工或自主方式进入安控预警区域以内时,立即人工启用安控判断线,之后无人艇便可以在可航区内按照任务要求安全航行。

图8 安全控制区域设置

图9 无人艇“撞击”安控预警线

图10 无人艇“撞击”安控判断线
由软件显示界面图9和图10可以看出,当无人艇“撞击”安控预警线时,无人艇降到怠速约为4.3 kn,并发出安控报警信号(预警);当无人艇“撞击”安控判断线时,无人艇将熄火,速度降为0,并发出安控报警信号,之后再根据以上安控逻辑策略执行相应的航行操作,实际湖上试验验证了安全控制系统的有效性。
5 结论
针对自主无人水面艇的航行安全问题,本文首次设计实现了无人艇航行安全控制系统:
1)分析了无人艇海上自主航行中存在的主要安全隐患以及提高航行安全技术手段。
2)设计了无人艇航行安全控制系统总体技术方案,首次提出基于“射线法”的无人艇安全控制算法,实现了艇上自主安控和基站被动安控两种安全保障措施,并详细阐述了安全控制系统安控策略的执行流程。
3)利用仿真技术和实际的湖上试验验证了本文设计的航行安全控制系统的有效性和可靠性。
4)本文所提出的无人艇航行安全控制系统可推广到无人车、无人潜航器、无人机等航行安全控制中,算法通用性良好,具有一定的普适性。
