大数据环境下多代表点近邻传播的微小图像特征智能识别与仿真
2019-01-10曹敏
曹 敏
(福建江夏学院 金融学院,福州 350108)
随着计算机技术的不断发展,图像数据处理能力和识别技术也得到了进一步增强,数字图像智能识别技术在图像处理方面得到了大规模使用[1].但是,目前关于微小图像特征识别的研究,还尚有很大难度.微小图像是一种可视化程度低,自身特征不突出,因此在对其进行特征识别的时候,难度很大[2-3].借助计算机对微小图像进行深度研究,以实现对其进行特征的智能识别.在对微小图像特征的智能识别过程中,计算机视觉是其最主要的实现方式,具有十分重要的作用[4-5].在对微小图像进行特征识别时,需要对图像采集大量的信息,采集图像数据的实时性和精确度是微小图像识别领域研究的热点.采取何种方法可以有效对微小图像特征识别总是计算机技术对微小图像处理研究的重要内容[6].
本文提出了一种能够有效识别微小图像特征的智能识别仿真.本方法的特点是无需构建层次深度,只需通过正向与逆向映射的手段来合成当前图像识别微小图像质量,同时再通过应用图像识别多代表点近邻传播使产生于各源参考图像的各类冗余信息被全面除去,并搜索各个参考图像缺失的数据信息,通过这种方法对微小图像特征识别过程中产生的图像空洞进行补偿.通过实验分析表明:本文提出的微小图像特征智能识别算法具有识别率高、鲁棒性好的特点.
1 多代表点近邻传播算法
本文采用的多代表点近邻传播算法以两输入与两输出系统作为分析例子,采用式(1)所示的数学模型:
(1)
如式(2)所示,y1与y2是系统输出,u1与u2是系统输入,Gmij(s)代表示第i个输出与第j个输入之间的函数关系:
(2)
上述识别函数的控制精度受到基函数的明显影响.本文只对调节状况进行分析,所以应用了一个阶跃函数并实现了优异的追踪效果.
只使用一个阶跃函数时,u1(k)与u2(k)两个控制量之间满足如式(3)关系:
(3)
假定输出量y1不具有纯滞后的特征,令式(1)中的Tdm11=0与Tdm22=0,加上一项零阶保持器实现离散化之后,该模型具有如下差分方程
(4)
其中,αm11=e-Ts/Tm11与αm12=e-Ts/Tm12,ym11与ym12各代表u1与u2对y1所具有的贡献作用,下述情况一样.
结合式(3)与式(4),采用数学归纳法获得任意Pi步对应如下的识别输出是
(5)
该识别模型的输出结果对应于u1与u2得到的识别输出的加和结果:
ym11(k+p1)=ym11(k+P1)+ym12(k+P1)
(6)
对优化目标式可以取PL=PU=P1并令:

(7)
综合式(3),(4),(5),(6)得到k时刻的控制量:
(8)
根据Smith的估计控制方法,本文构建了纯迟延时间等于零的分析模型,之后对系统输出修正可以获得修正结果如式(9)所示:
yprev1*(k)=y1(k)+ym11(k)-ym11(k-D11)+ym12(k)-ym12(k-D12)
(9)
图1显示了与该方法相关的图像识别极线多代表点近邻传播过程与性质.
2 微小图像特征智能识别
微小图像特征智能识别步骤:对源参考图像1进行McMillan顺序扫描处理,通过正向映射方式将此源参考图像映射到目标图像上.对目标图像进行全面扫描.当发现空洞点之后,将该点通过逆向映射的方式投影到源参考图像2上并对此空洞点像素进行识别分析,从而完成此空洞点的识别过程,结果见图2.
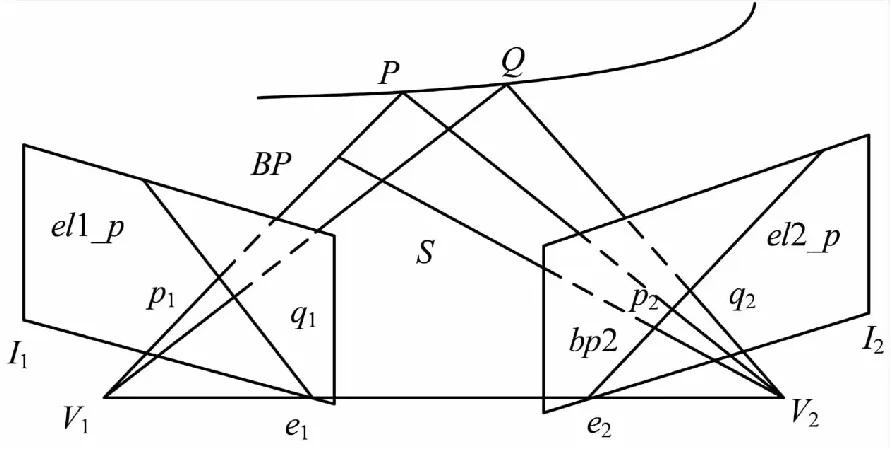
图1 立体图像学的相关特性
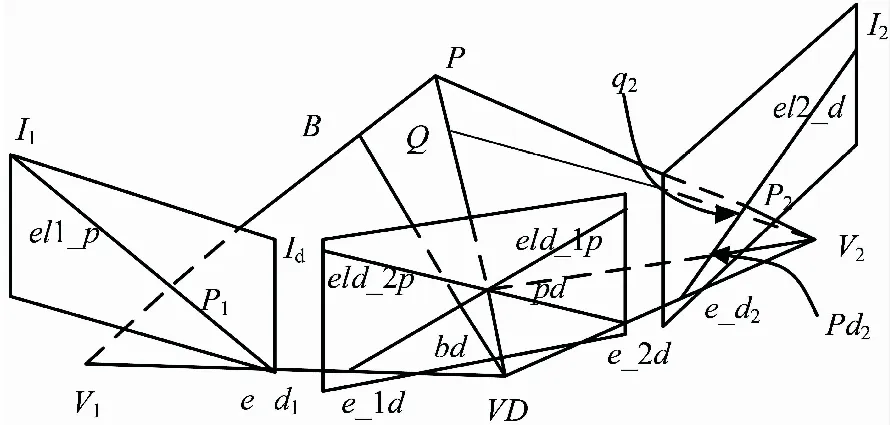
图2 微小图像特征智能识别示意图
结合多代表点近邻传播特点可知,由目标图像识别经屏幕点pd可以观察到的各个空间点都将位于从目标图像识别VD发射并通过屏幕点pd的射线上.通过分析可知,该方法需对图像进行两次扫描处理,提升此算法效率的重要因素是提高对源参考图像2的极线像素点进行搜索的速度,从而实现快速获取存在于目标图像上的空洞点像素的过程.
利用多代表点近邻传播算法可以实现通过逆向映射方法对目标图像的识别像素点进行搜索的效果.此识别算法是通过重投影转换方式计算得到目标图像上的某一点对应于源参考图像的各可能对应点的最小与最大深度数据,接着再通过插值方法计算得到此点的实际深度数值.当对比此计算值与此点实际深度值相符时,说明源参考图像点就是所要寻找的目标图像识别点.这一识别算法较为简单,不过该方法具有和重投影过程相同的计算量,同时因为只对源参考图像实施深度比较,因此该方法不能继续利用目标图像上的已有数据信息,所以此时依然需要通过重投影转换公式来判断存在于源参考图像上的某一点和目标图像对应点的关系,从而完成像素点识别过程,并获得微小图像质量像素点.
假定目标图像识别经屏幕点pd可以观察到点P,结果见图2,该点与源参考图像2上的对应点是p2.因此,该方法的效果是通过选择特定的方向从极点e2对极线el2-p各个像素点进行搜索,直到初始投影点落至p2点.通过上述分析表明,此算法进行e2至p2搜索时占用了算法的主要时间.因此,如果能够使开始搜索的像素点s2尽量接近p2点位置,则可以显著降低搜索过程所消耗的时间.
本方法所确定的目标图像的eld-2p极线遍历方向取决于对eld-1p极线进行的逆向转换过程,这使该方法能够沿极线eld-1p对空洞点周围完成逆向搜索获得所需像素点并获得被源参考图像1遮挡的像素点z值.进一步分析表明,此z值就是估计得到的最临近pd像素点且小于此点的最大z值点,结果见图2.令该极大z值对应的空间点是Q点,那么可以得到该点对应于源参考图像I2的像素投影点是q2.该方法是从此像素点朝特定方向往p2进行搜索.
3 仿真与结果分析
为了验证本文提出的微小图像特征智能识别方法的实用性,采用美国DARPA实验中的图片和数据进行本文图像识别算法的实验.利用Matlab仿真软件对以多代表点近邻传播为基础的图像识别算法和采用支持向量机的图像识别方法的实验数据进行直观说明.
分别使用本文算法(多代表点近邻传播方法)和支持向量机的图像识别方法分别进行测试.在v=3和v=4两种不同特征尺度的情况下,分别来测试本文算法和支持向量机图像识别方法的贡献率(%),实验结果如图3和图4所示.
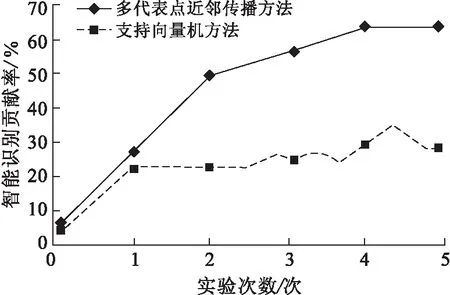
图3 尺度v=3的情况下两种方法识别贡献率对比
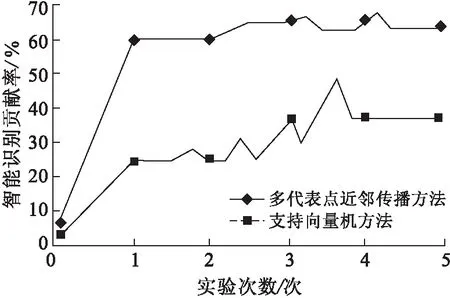
图4 尺度v=4的情况下两种方法识别贡献率对比
从图3和图4可以看出,在尺度较小的情况下进行微小图像特征的智能识别贡献率很小,而在尺度较大的情况下贡献率很大.但是,使用本文的图像智能识别方法在不相同的尺度情况下,对微小图像特征识别均具有较大的贡献率,非常适用于微小图像特征的分类,这就表明采取多代表点近邻传播方法对微小图像特征识别的过程中,不仅在运算量还是算法性能都比采取支持向量机的图像识别方法要强.
本文通过研究实现了上述算法并获得良好的实验测试效果,该方法的源参考图像见图5.图6则是通过微小图像特征智能识别得到的图像.对比分析原先参考图像通过微小图像特征智能识别得到的图像可知,能够有效提升微小图像特征平均识别率,且鲁棒性较好.

图5 源参考图像

图6 微小图像特征智能识别图像
4 结论
本文研究得到了一种微小图像特征智能识别方法.该方法综合应用了正向与逆向映射技术以实现对当前图像识别微小图像质量的快速合成效果,同时应用了图像识别多代表点近邻传播从其它源参考图像获得微小图像质量像素点,无需对整幅参考图像进行重投影与深度对比分析.通过分析当前图像识别方法进行大数据环境下微小图像特征智能识别过程中存在的弊端,提出一种大数据环境下多代表点近邻传播的微小图像特征智能识别方法.实验结果表明,所提方法能够有效提升微小图像特征平均识别率,且鲁棒性较好.
