新能源汽车能量管理方法的研究
2019-01-10孔岩
1 前言
随着经济水平和科技实力的不断提升,汽车消费市场逐渐扩大,但面对全球范围日益严峻的能源形势和环保压力,发展新能源汽车已成为社会可持续发展的重要战略及市场新的增长点。其中,油电混合动力汽车作为新能源车的一种,其技术相对成熟,且市场发展前景良好,成为传统车向新能源汽车过渡的最好方式。一般来说,混合动力汽车是具有2种或2种以上能量源来驱动的汽车,现阶段研究的多为由发动机、电机、电池组构成的HEV,分为串联式、并联式和混联式。针对目前混合动力汽车能量管理控制策略,一般分为两大类:基于规则的控制策略和基于优化的控制策略。本文针对混合动力汽车能量管理控制方法进行相关研究。
2 基于规则的控制策略
基于规则的控制策略包括基于门限值规则的控制策略和基于模糊规则的控制策略。其中基于门限值规则的控制策略,主要依据工程经验和相关动力部件的效率特性进行设计。以当前的车速、需求转矩、SOC等为控制参量,通过一系列门限值将整车划分成不同的工作模式,当车辆运行状态满足门限的切换条件时,进行模式的切换。该控制策略操作简单,易于实现,且计算量小,实时性好,但其燃油经济性较差,无法实现工况的自适应[1]。
基于模糊规则的控制策略是在固定门限控制的基础上,将预定义的控制规则通过输入模糊化-模糊决策-输出逆模糊化来达到优化目的,具有较强的自适应性和鲁棒性。
由于基于规则的控制策略会陷入局部最优解,得到的燃油经济性较差,因而提出基于优化的控制策略,其中动态规划在能量管理方面可实现全局最优,是目前在控制理论中所能达到的车辆经济性最优解。
3 基于优化的控制策略
基于优化方法的控制策略包括实时优化和全局优化,其中实时优化算法包含等效油耗最小原理(ECMS)、庞特里亚金最小值原理(PMP)、模型预测控制(MPC)等[1],通常结合一些智能算法,如遗传算法(Genetic Algorithm,GA)、粒子群优化算法(Particle Swarm Optimization,PSO)、模拟退火 (Simulated Annealing,SA)等,实现能量管理系统的瞬时最优。全局优化算法主要包括动态规划(Dynamic Programming,DP)[2]、随机动态动态规划(Stochastic Dynamic Programming,SDP)。
基于实时优化,针对能量管理系统(EMS),提出一种简单、易优化的数学表示法,得到使用遗传算法进行优化的能量管理实时优化系统[3]。混合动力系统中的第i装置的功率Pi是负载功率P0的一部分,该部分的大小由系数γ决定。假设γ是负载功率的连续函数,策略中的变量只有函数系数(即A,B,C,D)。将4个系数的常数值进行优化,取值范围为[-1.2 1.2],其中A和C的值详细说明可能由电池提供的负载功率的最大部分;B和C的值详细说明负载功率γ函数的值达到A和C指定的最大值。使用GA作为优化方法进行EMS优化,包括以下6个步骤[3]:
1)染色体编码:函数参数取决于系数A、B、C和D,它们均经过GA优化。
2)进行理论驱动周期:分析不同SOC下的电力情况,然后将每个GA生成期间的解决方案与理论驱动循环期间的能量消耗进行比较。
3)选择:最佳适应个体具有重现Qmax的最高概率,最不适应的个体具有重现Qmin的最低概率。
4)执行交叉操作,重复m次。
5)进行突变:防止GA局部的过多堆积。
6)进行全局优化:由GA执行的代数取决于处理器的计算能力和TR的值,为了确保代数足以找到近似解,针对使用相同算法的NEDC全局优化8次。
基于全局优化控制策略,针对插电式混合动力汽车,基于驾驶模式识别和动态规划,提出自适应能量控制策略,瞬时成本函数包含电池能量损耗、燃料能量损失,基于贝尔曼最优原理将两点边界问题分解为最小化序列问题,建立基于规则的多模式切换策略,具体步骤包括[3]:
1)从DP提取控制规则;
2)确定控制规则中的阈值;
3)DPR技术的建立;
4)将实际驾驶情景分类进行驱动模式的切换。
4 基于自适应动态规划的控制策略
动态规划方法本质上是一种非线性规划方法,其核心是贝尔曼的最优原理,虽然基于动态规划的能量管理控制策略得到的是理论上的最优解,但是需要已知工况信息,无法实现在线控制。同时随着状态变量和控制变量维数的增加,传统的动态规划后向求解的计算量和存储量显著增加,往往导致“维数灾”现象的发生。因此,基于自适应动态规划(Approximate Dynamic programming,ADP)[4]的能量管理控制策略应景而生。自适应动态规划由3个部分组成,各个部分均可用神经网络来代替。其中,执行网(Action network)用来近似最优控制律,评价网(Critic network)用来近似最优性能指标函数。当非线性系统未知时,一般采用模型网(Model network)来近似非线性系统。常见的结构是启发式动态规划(HDP),其结构如图1所示:
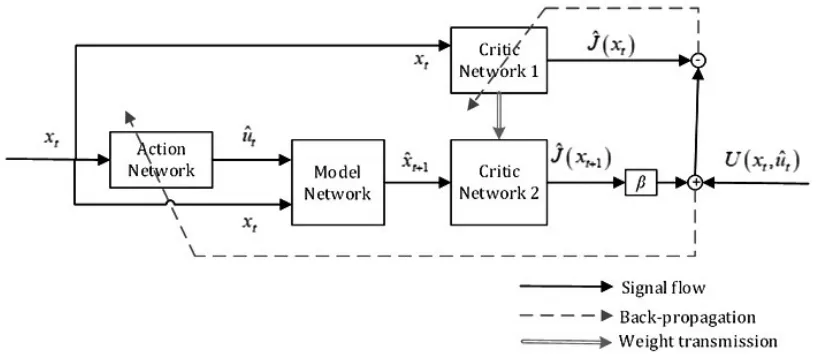
图1 HDP结构示意图[4]
在理论层面上,自适应动态规划在非线性离散系统的轨迹跟踪、最优控制等问题上取得了一定的成果。针对非线性系统最优控制问题[5],提出一种多步启发式动态规划(MsHDP)和开发评价-决策神经网络结构,其中评价网以最小二乘法计算神经网络的权值向量,决策网采用最速梯度下降法来更新神经网络的权值向量,将多步启发式动态规划方法简化为线性二次调节(LQR)问题。在二次启发式动态规划(DHP)结构的基础上,提出一种全局二次式启发动态规划,以处理离散时间非线性系统的近似最优跟踪控制。全局二次式启发动态规划算法构建3个神经网络分别计算系统动力学误差、成本函数及其梯度、每次迭代中的控制策略。其中,在当前时刻调整评价网1的权值向量,评价网2仅用于计算下一时刻的近似成本函数。
在实际应用层面,自适应动态规划算法已在交通运输、电力系统、工业生产等方面展开应用。
正是在以上自适应动态规划算法理论研究的基础上,基于自适应动态规划的混合动力汽车能量管理方法得以发展。由于汽车动力系统已知,即非线性系统已知,则不需要用神经网络来近似非线性系统,可以采用无模型网[6]的自适应动态方法进行能量管理控制。将神经网络应用于混合动力汽车能量控制,提出一种基于长度比的神经网络能量管理策略,用于插电式混合动力城市公交的在线控制。
5 总结
目前各企业针对混合动力汽车能量控制策略,在应用层面上多采用基于规则的控制策略,近几年随着动态规划和自适应动态算法的发展,部分公司已经针对基于动态规划、自适应动态规划的能量控制策略进行研究,实现油电配比的最优控制及在线优化控制,以使混合动力汽车满足动力性要求的前提下,达到最佳燃油经济性。
