一种气浮模拟器位姿状态跟踪测量方法研究
2019-01-08邓松波刘小勇刘书选王燕波
邓松波 刘小勇 李 科 刘书选 王燕波
(1.北京精密机电控制设备研究所,北京,100076;2.中国人民解放军火箭军驻长征航天控制工程公司军事代表室,北京,100076)
1 引 言
五自由度气浮模拟器为了模拟空间飞行器在地面状态的姿态运动和轨道机动运动,需要在大平面空间和大角度空间范围内运动。为了将模拟器的姿态和轨道机动运动控制和实际运动位置和姿态形成闭环控制,需要一种能够在超大平面空间范围内快速测量模拟器位置和姿态的测量方法和策略,从而为模拟器的高精度闭环控制提供基础[1~4]。
在超大尺度空间范围内进行位置和状态测量及控制,由于空间尺度大、被测对象复杂多样、周围干扰严重、相对测量精度要求较高、多任务测量并存、测量效率要求高等,对测量提出了很高要求。在空间飞行器位姿测量领域,大尺度空间范围覆盖几米至几十米空间范围,测量精度要求至亚毫米级别,有多种测量手段,大型三坐标测量机(CMM:Coordinate Measuring Machine)采用接触式测量,是典型的大尺度空间机械式测量方法,但是测量过程为离线测量,不能参与实时控制过程[5,6]。基于声学原理的大尺度空间测量通过超声波原理测得发射器和接受目标的距离,用多距离交汇实现空间三维坐标测量,但测量精度不高,受外界环境温度、湿度影响较大,精度无法保证[7,8]。基于光学的大尺度测量系统具有测量精度高、稳定性好、抗干扰性能强等优点,有激光干涉原理的激光跟踪仪、有光学测角传感的经纬仪,有基于视觉相机的大尺度视觉测量系统,有基于三角测量法的iGPS大尺度测量[9,10]。考虑非接触式测量、测量精度、测量快速性以及在线测量参与反馈控制的特定,iGPS测量和惯导组合实时测量模拟器的位置和姿态信息,用于反馈控制模拟器的位置和姿态坐标。
2 五自由度气浮模拟器
随着航天技术的不断发展,对空间飞行器的机动跟踪能力和位姿定位精度要求越来越高,系统功能越加复杂, 运行寿命要求更长。只有实现位姿精确跟踪和冗余控制技术,才能为复杂空间任务提供可靠的飞行器平台。飞行器上的所有导航与制导控制设备、推进系统以及传感器长时间可靠稳定工作,才能确保飞行器圆满完成空间在轨任务。所以,空间飞行器在进入太空之前需要进行大量的地面测试仿真试验,以确保控制方案准确和产品状态稳定可靠。
空间系统仿真按照仿真性质分为数字仿真、半物理仿真和全物理仿真。全物理仿真直接将空间飞行器的测量控制系统和执行机构以实物形式引入仿真系统中,模拟飞行器所处的空间微重力环境,以最大程度还原模拟飞行器在空间的飞行状态,发现可能存在的控制逻辑错误和硬件故障[11,12]。
气浮模拟器可以为空间飞行器提供空间微重力模拟运动,原理是通过在平面(球面)气浮轴承与气浮平面(轴承球窝)之间的压缩气体形成微米级气膜,形成微摩擦力学环境,抵消轴承之上的质量块的重力,等效模拟空间飞行器的失重运动。空间飞行器的动力学由气浮模拟器模拟,控制系统全部由实物硬件组成,使用和飞行器相同的动力推动系统和控制规律,完成气浮模拟器的位置和姿态控制。这样就可以对飞行器星上控制器、元器件的振动和燃料推进等进行仿真,尽早发现空间飞行器设计过程中存在的问题和故障,避免后期更大的损失。所以多自由度气浮模拟器已经成为空间飞行器地面仿真的关键设备。
针对自行研制的五自由度气浮模拟器开展工作,其中两个平动自由度完成轨道机动模拟,由三个平面气浮轴承完成;三个旋转自由度完成飞行器横滚、俯仰和偏航的姿态模拟,由一个球面气浮轴承完成。
五自由度气浮模拟器为了完成轨道机动运动,需要在超大水平面内进行机动运动,这就需要模拟器具备在超大水平面范围内精确测量模拟器的位置信息和姿态信息,同步反馈回模拟器上的实时控制系统,对模拟器的位置和姿态实时跟随,如图1所示。
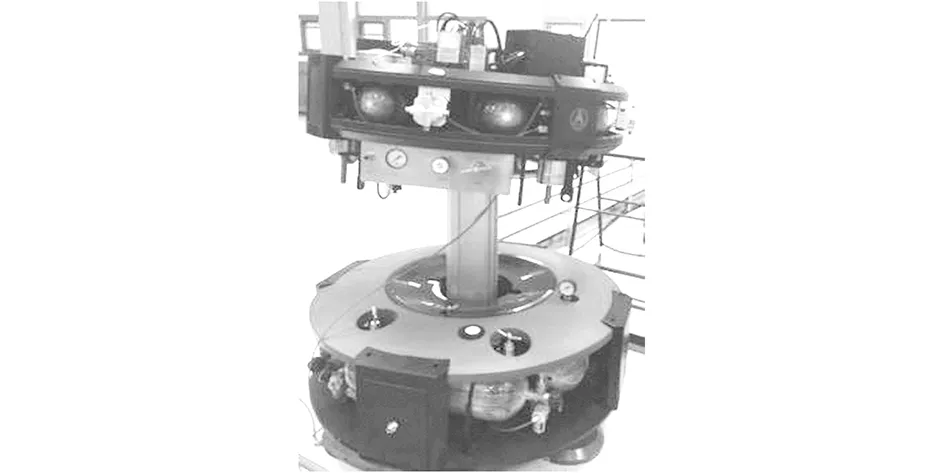
图1 五自由度气浮模拟器Fig.1 5-DOF air bearing simulator
模拟器在超大水平面范围内位置和状态跟随的测量方法进行研究,平面运动范围为8m×18m,在空间的四周布置iGPS的4个发射器,如图2所示。
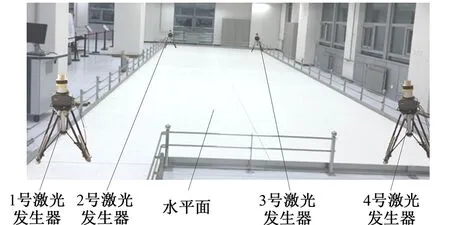
图2 模拟器运动平面及发射器分布Fig.2 Simulator motion plane and emitter distribution
3 iGPS轨道机动测量
超大水平范围内的高精度的测量和控制目前的非接触测量方法主要有基于机器视觉的测量和基于三角定位法的iGPS测量。根据需求,考虑到安装距离要达到几十米甚至更长,采用机器视觉这种图像定位的测量方案精度较差,约为5mm,不能满足精确定位需求。
基于iGPS的定位测量系统是基于三角定位法的测量技术,它较标准全球定位系统更为精确,同时适合室内环境。iGPS系统同样包含“卫星”网络,这些“卫星”就是激光信号发射器,接收器通过接收来自发射器的信号进行处理和计算从而进行定位。
iGPS可采用自由组网的方式对空间位置进行标定,通常的标定工具为标准杆,标准杆为一个矢量杆,杆的两头安装有iGPS的接收器,而两个接收器之间的长度是已知的。用户使用标准杆在iGPS的测量空间采集标定数据,数据采集结束后,标定算法会对采集的数据进行分析处理。通过优化计算发射器到标准杆上接收器的方位角的交叉,可以计算出在同一坐标系内每一个发射器的方位信息。
任务工作空间大于200m2,因每个iGPS发射器测量范围40m,同时为保证无死角,采用在花岗石平台四周布置4个激光发射器的配置方式。
3.1 iGPS工作原理
激光发射器绕竖直旋转轴高速旋转,两个激光扇面高速旋转形成扇面覆盖范围。通过接收器得到两组方位角和俯仰角(αA,βA),(αB,βB),以此计算接收器的空间位置,如图 3所示,具体过程如下。
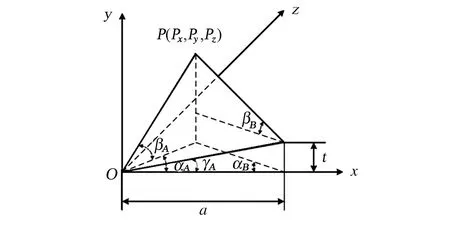
图3 三角测量原理Fig.3 Triangulation principle
根据三角测量原理可以得到如下关系式公式(1)
(1)
式中:(Px,Py,Pz)——点P的三位坐标值;a,t——分别为两台激光发射器的距离和高度差;γA——两台激光发射器的连线与参考坐标系X轴夹角。
在实际测量中有效发射器数量要求大于2,多条异面测量轴加入解算,将目标点与所有测量轴线距离的平方和当作目标函数,求解被测点的估计值。
3.2 iGPS测量系统标定
为了确保iGPS测量数据的准确度,需要使用更高精度的激光跟踪仪对其进行精度检定。这里使用准确度等级为15μm+6μm/m的激光跟踪仪对由4个发射器构建的iGPS空间测量定位系统进行标定。iGPS标定数据见表1。
内部测量空间为:X:-6000mm~+6000mm;Y:-2500mm~+2500mm;Z:-1000mm~+1000mm。在整个测量空间内分高中低三层用iProbe采集多个空间点,与跟踪仪的测量结果进行比较偏差值,标定结果如表 1所示。
4 惯导姿态测量
惯导是惯性导航系统(Inertial Navigation System,INS)的简称,由惯性测量组件(Inertial Measurement Unit, IMU)测量载体相对于惯性系的角速率和加速度,再根据牛顿运动定律解算出载体的速度和位置等信息,测量过程不受外界环境干扰,能够连续实时测量载体的全状态姿态信息,已经广泛运用到航空、航天、航海等技术领域。惯导分为平台式惯导和捷联式惯导,采用捷联式惯导。捷联式惯导(Strap-down Inertial Navigation System,SINS)省去平台式惯导的机电导航平台,直接将陀螺仪和加速度计等惯性元件安装到载体上,可以大大降低惯导的重量、体积和成本,增大了捷联式惯导的应用范围和便捷性[13~15]。
惯导坐标系绝对变换率和相对变化率关系如公式(2)所示
(2)

惯性导航常用坐标系表示方法如下:地心惯性坐标系(简称i系);地球坐标系(简称e系);地理坐标系(简称t系);导航坐标系(简称n系);平台坐标系(简称p系);机体坐标系(简称b系)。捷联惯导系统通常采用四元数法求解载体姿态,具有精度高、计算量小、具有全姿态信息等优点。
(3)
惯导连接在NI-cRIO的NI 9870板卡,采用RS232通信,波特率为115200bps,有5个通信通道:COM0、COM1、COM2、COM3、USB通信口,AP平台的坐标系定义依据惯导坐标系定义。
5 iGPS和惯导组合位姿跟踪
五自由度气浮模拟器的位置和姿态采用iGPS和惯导解耦测量和控制,两者的下位控制系统采用NI-cRIO的NI 9870和9871板卡,采用RS232通信,波特率为115200bps。采用cRIO实时控制系统,利用FPGA高速采集来自iGPS系统和惯导的实时位置和姿态数据信息,实现气浮模拟器位置和姿态的实时伺服反馈控制。
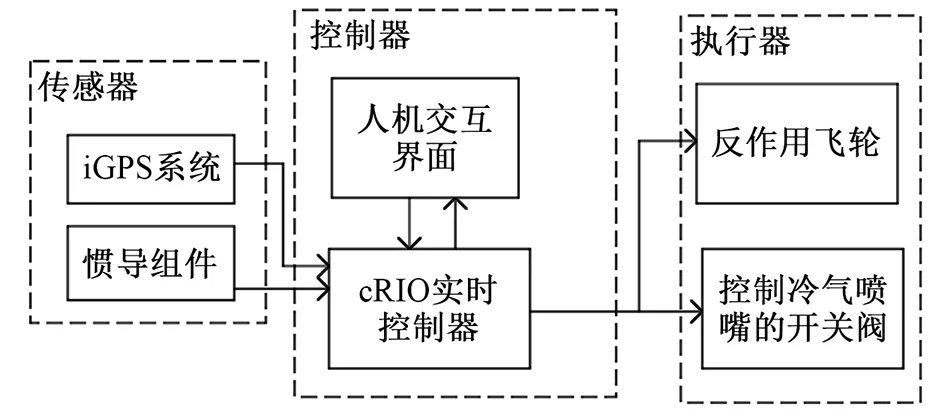
图4 控制框图Fig.4 Control block diagram
供电采用VICOR电源模块DC-DC为两者提供稳定的电源。在测量获得五自由度气浮模拟器的实时位置和姿态坐标后,由NI-cRIO控制器发出指令,控制反作用飞轮或冷气喷嘴提供反作用力矩和反推力,伺服控制五自由度气浮模拟器实时跟踪指令位置,实现模拟器的位置和姿态实时跟踪。传感系统、控制系统和执行机构之间的控制关系如图4所示。
位置和姿态闭环控制采用PID控制算法,输出力矩指令对其进行自动控制。喷嘴控制频率为20Hz,通过调整输出占空比对喷嘴进行开关控制,闭环控制算法如图5所示。

图5 闭环控制算法Fig.5 Loop control algorithm
五自由度气浮模拟器上位机综合控制系统的软件界面如图 6所示,可以方便试验人员观察和操作模拟器的实时状态和参数。
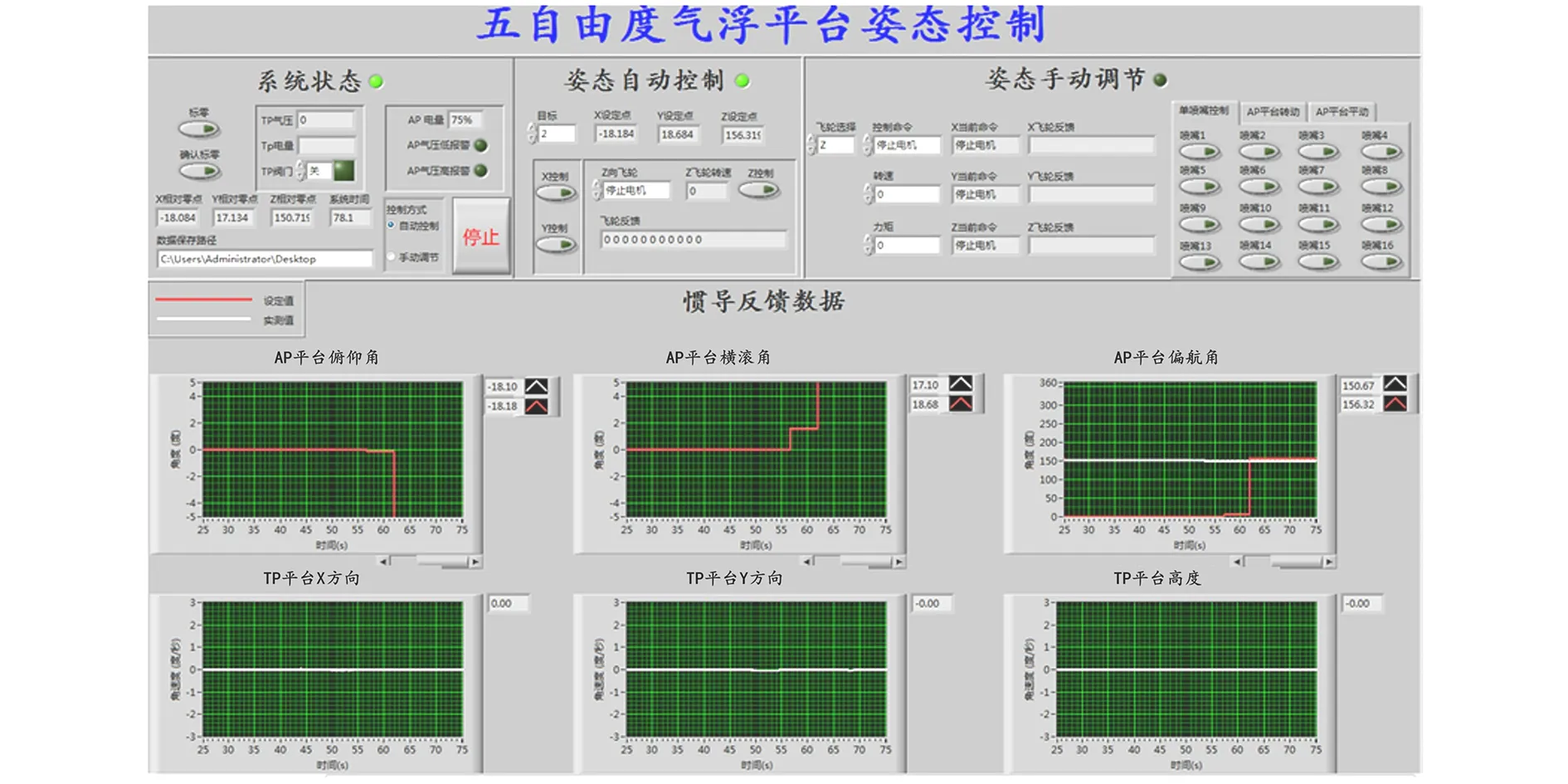
图6 上位机控制界面Fig.6 Upper computer control Interface
6 结束语
采用iGPS和惯导的组合导航,同步测量模拟器的位置和姿态,通过飞轮和冷气喷嘴伺服动作,闭环控制气浮模拟器的位置和姿态跟踪,实现空间飞行器模拟器在空间的失重运动全物理模拟试验,对于将iGPS和惯导的组合导航应用于超大空间的导航和运动跟踪等应用领域有较大的推广意义和价值。
