基于显微视觉的逆反射标志中心定位方法研究
2019-01-07李艳徐永李鸿儒甘晓川瞿剑苏马晓苏
李艳,徐永,李鸿儒,甘晓川,瞿剑苏,马晓苏
(航空工业北京长城计量测试技术研究所,北京 100095)
0 引言
工业摄影测量系统中通常使用基准尺(Scale Bar)作为长度基准,基准尺长度的准确性直接影响摄影测量系统测量结果的准确性。摄影测量标尺长度定义为两个圆形逆反射标志(Retro-reflective Target,RRT)中心之间的距离,因此,要精确确定基准尺长度,关键是精确确定标志圆的中心。
目前,摄影测量基准尺长度的校准方法主要有几何中心法、灰度重心法等[1]。几何中心法利用显微镜瞄准标尺上的RRT,通过人眼观察,使目镜中的切割线切取标志点边缘以确定标志中心。该方法得到的是标志的几何中心,人眼误差和RRT边缘质量对定位结果影响较大,定位精度低。灰度重心法利用显微镜和高分辨力CCD相机获取RRT图像,通过图像处理实现RRT中心定位。该方法得到标志圆的灰度中心,避免了人眼观测的影响,实现标志点中心的亚像素级定位,理论上可达到较高的定位精度[2]。文献[3]分析了测量过程中每个调整环节对测量精度的影响,包括基准尺调节、CCD成像系统光轴调节等。然而,已有研究均未明确分析RRT图像获取时成像亮度、成像位置和大小等因素对定位结果的影响,也缺乏对RRT定位过程中所采用的具体图像处理算法的分析。
本文基于显微视觉原理,给出观察并采集逆反射标志微观特征图像的系统装置,分析RRT图像特征,选择适用的预处理方法、标志点特征识别和提取方法、标志点图像中心定位算法,精确计算摄影测量基准尺的标志点中心。同时,通过试验比较RRT图像亮度、成像大小、成像位置等因素对基于灰度重心的定位算法(灰度加权质心法和灰度平法加权质心法)与基于标志点边缘的定位方法(椭圆拟合法)的影响。通过本文的研究,对基准尺长度测量中的RRT图像形成一套完整规范的处理算法,并对RRT图像大小、位置、照明等获取条件提出要求,有利于提高基准尺校准系统的测量重复性,规范校准过程。
1 逆反射标志及其特征
当被测物体不具备明显特征或通过摄影测量手段不能可靠的识别并精确定位物体特征时,通过布设人工标志可辅助完成测量过程。逆反射标志是高精度工业摄影测量中使用最为广泛的人工标志,一般为圆形,表面粘贴直径数十微米的玻璃微珠,具有回光反射的特性,在特定位置光源照射下的反射亮度比漫反射白色标志高出数百甚至上千倍。图1为GSI公司研发的各种摄影测量靶标及RRT。拍摄布有逆反射标志的被测物,很容易得到被测物“消隐”、标志清晰的“准二值图像”[4],能够简化被测物体成像点识别过程,提高测量效率。标志的材料组成及反射原理如图2所示。

图1 GSI公司的各种摄影测量靶标及RRT

图2 RRT组成及逆反射原理
以V-STARS®摄影测量系统为例,其逆反射标志厚0.11 mm,由回光反光材料制作而成。标志的大小通常取决于相机到被测物的距离、相机分辨力、镜头焦距和曝光等。标志的最小直径应为被测物平均尺寸的1/1000,使用两倍最小尺寸的目标时,系统可实现精确测量[5]。常见的RRT目标尺寸如图3所示,其中直径6 mm的标志最为常用。
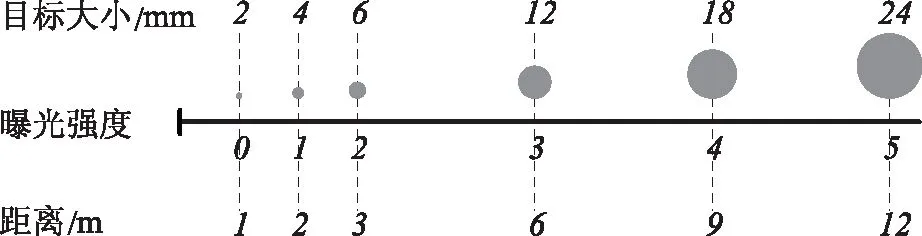
图3 RRT目标尺寸的选择
2 测量系统
2.1 系统组成
基于显微视觉的RRT中心定位测量系统主要由工业CCD相机、显微镜、光源及控制器、夹持升降机构和计算机等组成,如图4所示,夹持升降机构安装在可移动位移台上,便于RRT图像的瞄准。
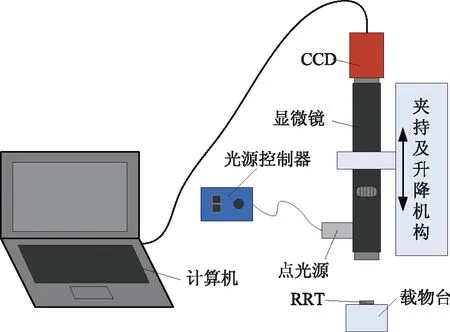
图4 系统组成
为获取具有清晰玻璃微珠特征的RRT图像,采用高分辨力CCD工业相机,结合0.7~4.5倍的显微镜头,配合附加0.5倍物镜,可对直径小于等于20 mm的标志进行图像采集与计算,满足常规尺寸的RRT中心定位需求。采用点光源结合同轴光的照明方式,可获得对比度高、受环境光影响小的图像[2]。系统的具体组成及各部件参数见表1。

表1 系统各组成部分及性能指标
2.2 定位过程
利用该系统对RRT标志进行中心定位的主要流程为:①调整位移台和载物台,使待测目标出现在相机视场中间位置;②调整光源和焦距,使图像清晰、亮度适中;③采集标定板(光刻尺)图像以获取像素当量(像素尺寸与实际尺寸间的比例关系,单位为μm/pixel);④采集标志点图像并进行图像处理和中心定位,结合标定结果获得中心定位的最终结果,即目标中心偏离视场中心的物理距离(mm),以(Δx, Δy)表示。RRT中心定位流程图如图5所示。
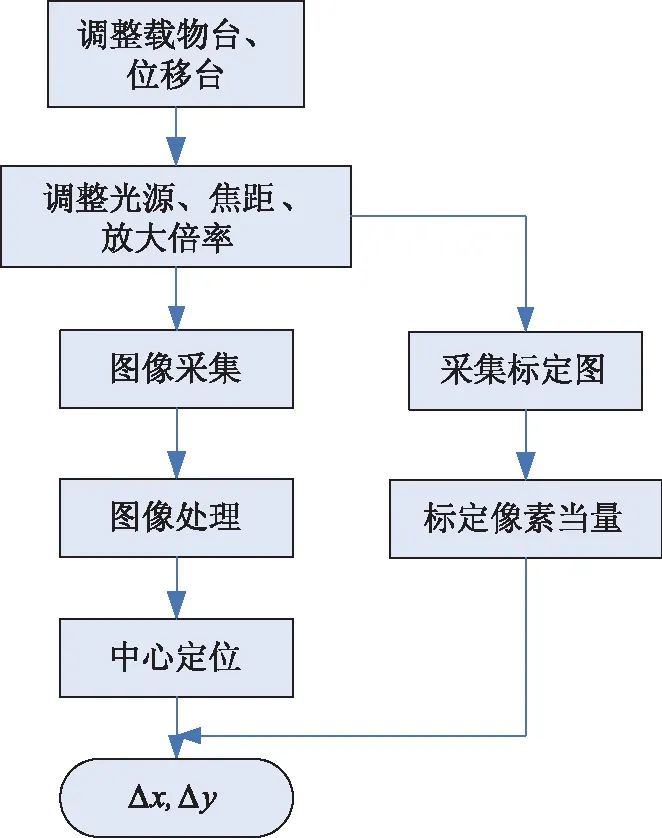
图5 RRT中心定位流程
为便于对光源及焦距进行调整,分别引入表征图像照度的函数AVEG(k)和表征调焦情况的图像清晰度评价函数SDM2(k)[6],即
(1)
(2)
其中,
Ik(x,y)=[fk(x,y)-fk(x+1,y)][fk(x,y)-fk(x,y+1)]
(3)
式中:S为图像评价窗口的面积;fk(x,y)为图像视频中第k帧图像中像素(x,y)处的灰度值。照度函数AVEG选取的是评价窗口中图像的灰度均值,其最佳取值需要根据实际经验确认,本文也将通过试验给出参考值;清晰度评价函数的值越大,表明图像灰度差越大,图像越清晰。
3 中心定位
摄影测量中,针对RRT图像的特点,使用图像处理方法提取中心点坐标的一般过程为:先进行图像预处理去除背景噪声,再使用识别算法从图像中找出标志点,然后利用中心定位算法确定RRT的中心坐标[5]。 图6为RRT的不同特征,从中可以看出,显微镜下获取的RRT图像与在摄影测量过程中获取的标志点图像有较大区别:在合适的照明条件下,可观测到RRT表面的玻璃微珠等微观结构。因此,标定基准尺标志点中心的方法与摄影测量中一般标志点的中心坐标计算方法有所不同,图像噪声、图像亮度、RRT外形质量、目标大小、照明均匀性、识别与定位方法等诸多因素均有可能会对最终的定位结果产生影响。
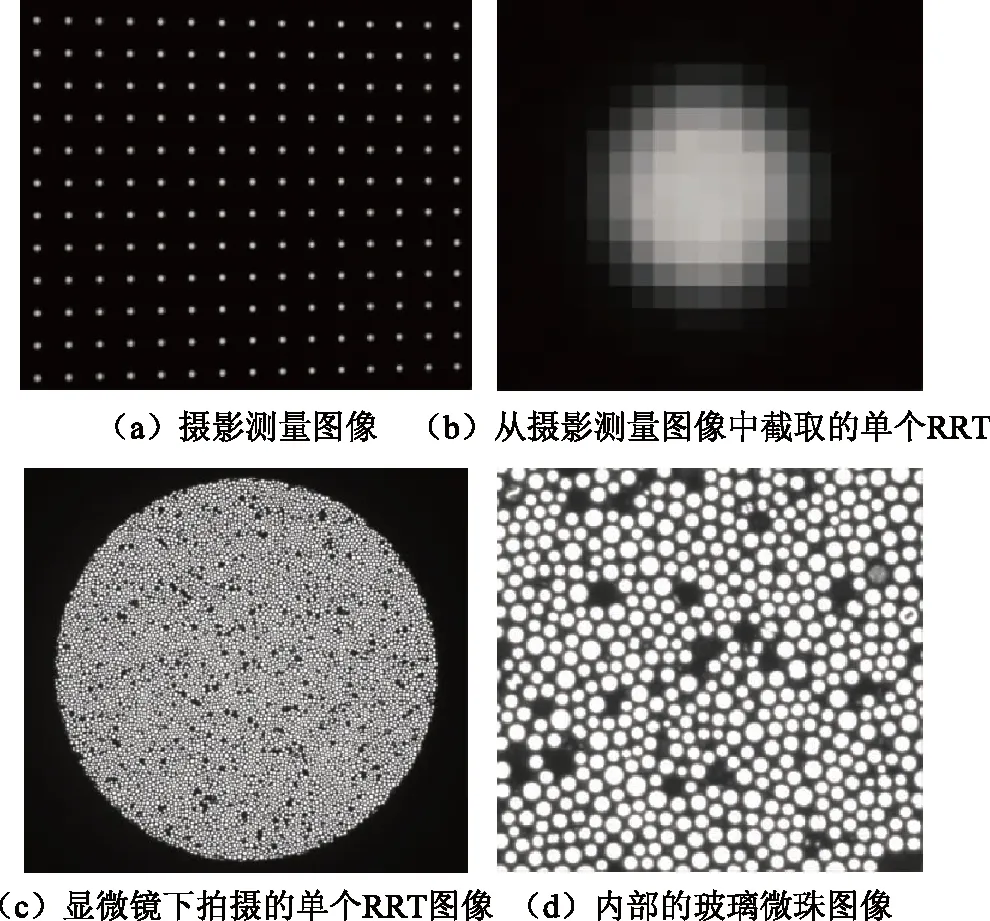
图6 RRT的不同特征
3.1 图像预处理
图像采集过程中,RRT表面光照条件不稳定、CCD相机噪声、视频图像采集的像素抖动等会给图像造成一定的噪声污染[7],图像预处理可有效去除噪声。常用的图像预处理方法有门限法、邻域加权平均法、中值滤波、自适应平滑等。在进行图像预处理时,应在去除噪声的同时尽可能保留图像特征。选用中值滤波方法对RRT图像进行预处理,如图7所示(截取RRT边缘处的一小部分区域显示),既平滑了图像,又不损失图像细节特征。

图7 中值滤波效果
3.2 标志特征提取
在显微镜下拍摄的RRT图像具备显著的“准二值”特性,目标区域和背景的灰度相差很大,接近二值图像。对图6(c)中的RRT图像作灰度直方图,如图8所示,可见图像主要可分为三个区域:①目标点外的背景(灰度值约为0~20);②目标点内玻璃微珠的背景(灰度值约为20~100);③玻璃微珠(灰度值最高可达到饱和值255)。

图8 标志图像灰度分布直方图
由于需获取整个RRT所在的圆形区域,而不是单个玻璃微珠,因此在进行阈值分割时要有效区分玻璃微珠周围背景和整个RRT区域外的背景。因此,先使用形态学闭运算连接临近的玻璃微珠区域,再进行开运算,去除由于玻璃微珠涂抹不均造成的离散点和毛刺。然后采用图像分割方法进行二值化,之后采用孔洞填充的方式提取出完整的目标所在区域,如图9所示。

图9 提取整个目标区域
若原图中存在较亮的背景,可能会出现提取出多个区域的情况。将图像连通后采用小面积去除法去除杂散背景,通过连通域围盒比判断并去除非圆区域,最终得到圆目标所在的区域,如图10所示。

图10 含有较亮背景的RRT图像处理
取经过图像中心的横截面上的像素灰度,如图11所示,准确去除了图像背景,提取出了目标圆所在的区域。

图11 图像中心线上的灰度值
3.3 标志中心定位
在经过上述图像特征提取后,获得了RRT目标圆的边缘特征与目标圆区域内的整体特征。由此,进行圆形标志点图像中心定位的方法可分为两类:一类是基于目标区域边缘信息的中心定位算法,如边缘坐标平均法、椭圆拟合法等,利用该类方法得到的定位中心被称为“几何中心”;另一类是基于目标区域内灰度信息的中心定位算法,如灰度加权质心法(又称灰度重心法)和灰度平均法加权质心法等,由此得到的定位中心被称为“灰度中心”。
关于两种定位算法已有较多的研究[8]。椭圆拟合法将边缘像素进行最小二乘拟合,求出椭圆的5个参数,通过这5个参数计算出椭圆中心的坐标,从而得到目标区域的中心坐标;灰度加权质心法以像素的灰度值为权重,计算目标区域内所有像素坐标的加权平均值,作为目标区域的中心定位结果。从原理上来说,椭圆拟合法仅依赖边缘信息,边界噪声或标志边界质量会对定位结果有较大影响;灰度加权质心法使用整个标志区域内的灰度信息,更能反映标志的整体情况,与其在摄影测量系统中的实际使用状态也更为接近。但需要注意的是,当照明不均匀或相机光轴与目标所在平面存在一定夹角时,目标的重心会发生偏移,利用灰度质心法进行定位的结果将不再准确。
图12是对图6(c)中的RRT目标进行中心定位的结果,其中δx= 1.1pixles,δy= 1.5 pixels。可见在光照均匀、图像清晰、目标质量良好的情况下,所得到的椭圆拟合中心和灰度加权中心之间的偏差很小。
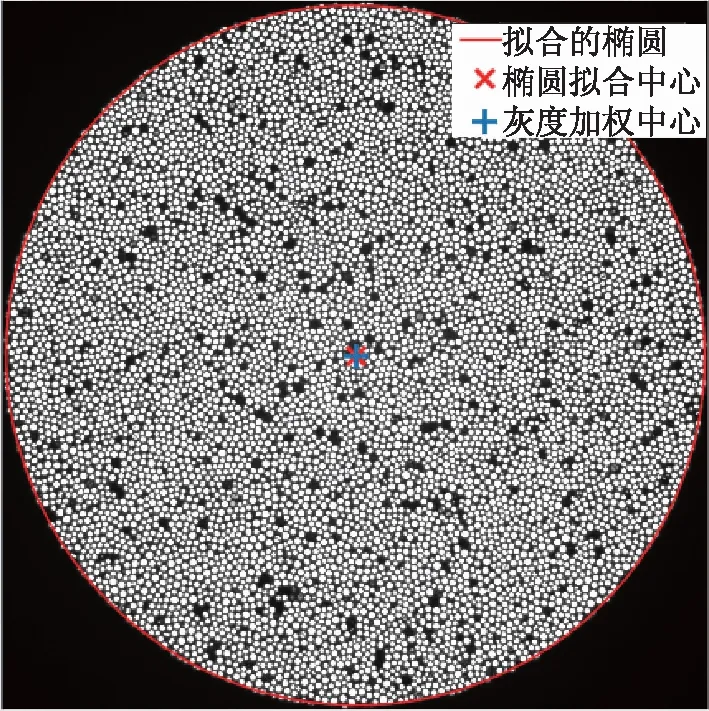
图12 RRT椭圆拟合中心和灰度加权中心定位结果对比
4 试验及数据分析
为验证RRT标志图像尺寸、在视场中的位置、图像亮度等因素对标志中心定位结果的影响,采用控制变量法对各个可能的影响因素进行试验验证,并对本文提出的标志中心定位算法进行评价。
4.1 标志图像尺寸
选取一个外观质量良好的、直径6 mm的RRT目标,分别在不同的图像缩放倍率下采集图像,每幅图像在采集时都保证其清晰度和照明情况一致,如图13所示。每个不同的放大倍率采集20张图像。

图13 不同缩放倍率下的RRT图像
以20张图像计算结果的均值作为该倍率下的中心定位结果Cr,并计算每张图像的定位结果Cri与Cr之间的距离dri,统计dri(i=1~20)的均方根误差,如图14所示。椭圆拟合法在缩放倍率大于0.6时,定位结果较为理想,目标圆直径与整幅图像的短边长度之比约为
利用灰度加权原理的定位方法无明显规律,整体的定位效果要优于椭圆拟合法。但在缩放比例大于1后(此时RRT图像接近视场边缘)有误差增大的趋势。

图14 标志图像尺寸对定位结果的影响
4.2 在视场中的位置
将RRT粘贴在三维精密位移台上,利用位移台将标志点分别沿x和y方向从CCD视场一端移动到另一端,每次移动的间隔约为0.1 mm,每个位置采集20幅图像。由于图像坐标方向与位移台移动方向没有完全平行,故当沿x方向移动位移台时,标志图像在y方向会有一定的偏移量。沿y方向移动也是同样的情况。

图15 在视场中不同位置的RRT图像
图16(a)是位移台沿x方向变化、y方向有一定偏离时,中心定位结果的变化趋势,图中的“+”是视场中心位置。椭圆拟合结果最接近目标移动的轨迹,且明显观察到椭圆拟合、灰度加权和灰度平方加权三种方法得到的中心变化曲线均接近直线,其斜率依次减小,灰度中心方法定位结果整体偏y正方向。导致灰度中心整体偏上的原因是:①被观测的RRT目标玻璃微珠分布不均,y正方向反光能力较强;②点光源照明不均匀,光源中心偏向于y正方向。导致灰度中心拟合的直线位移斜率减小的原因是:越接近视场中心,点光源照明越亮,而边缘处照明较弱,使得利用灰度加权方法计算的中心偏向于光源中心。图16(b)是位移台沿y方向变化、x方向有一定偏离时,中心定位结果的变化趋势,可观测到,由灰度方法计算的中心偏向于x正方向,综合两次的结果来看,点光源或玻璃微珠重心偏向于图像坐标x,y正方向(对应图像右下角),且点光源存在不均匀照明的现象。
图16(c),(d)是两次试验不同偏移量下的算法重复性。整体来看,利用灰度信息进行定位的方法重复性小于椭圆拟合法,三种算法的重复性误差均小于0.1 pixels。

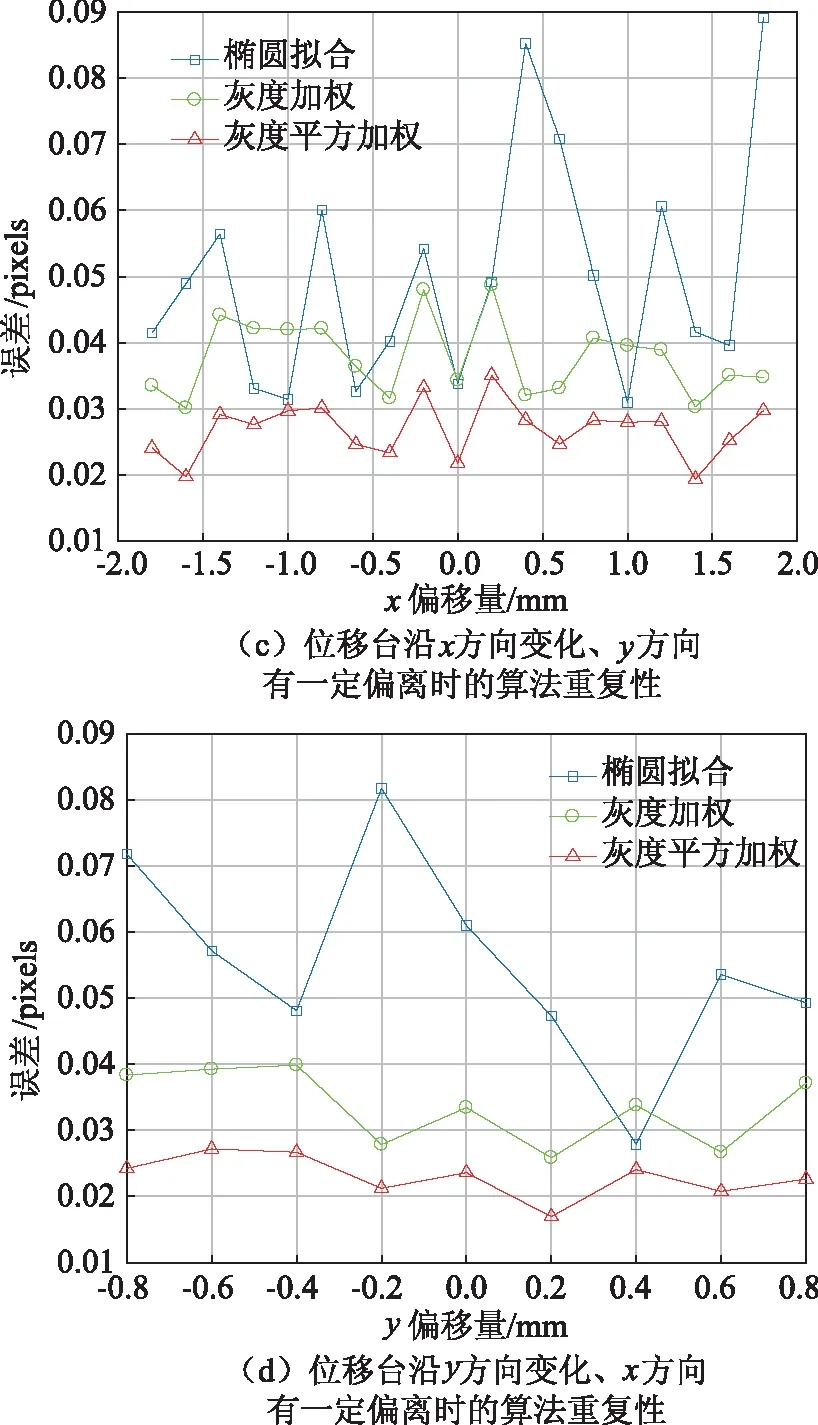
图16 RRT在视场中位置对定位结果的影响
4.3 图像亮度
主要考虑照明对图像亮度的影响。仍使用4.1中的6 mm目标,图像放大倍率为1,调焦后保持焦距不变。通过增加相机曝光量以改变图像亮度,由暗至量共改变了40次亮度,在每种亮度下采集10张图像。图17展示了几种不同亮度的RRT图像。

图17 不同亮度的RRT图像
图18显示了在图像亮度变化时,不同定位方法得到的中心位置的变化趋势。图18(a)为中心位置变化趋势,从整体变动量来看,椭圆拟合法受图像亮度的影响最小,灰度加权质心法次之,灰度平方加权质心法受亮度变化的影响最大。
图18 (b)为亮度评价函数变化对x轴坐标的影响,图18(c)为亮度评价函数变化对y轴坐标的影响,从中可以看出:①对于椭圆拟合中心,当亮度评价函数AVEG不超过120时,定位结果比较稳定;亮度继续增加后,其x轴坐标在0.5个像素范围内波动;y轴坐标随图像亮度增大而减小。②对于灰度加权质心与灰度加权中心,当亮度评价函数AVEG不超过110时,定位结果比较稳定;亮度继续增加后,x方向和y方向坐标随图像亮度增大而减小。
计算每组中的每幅图像到该组定位中心均值的距离,得到均方根误差,如图18(d)所示。可以看出,灰度中心法的定位重复性要优于几何中心法,三种方法均不超过0.13 pixels。


图18 不同亮度图像中心定位结果
计算不同亮度图像中达到饱和值255的像素个数占目标圆像素面积的百分比,如图19所示。

图19 不同亮度图像中达到饱和值的像素个数占目标圆像素面积的百分比
可以看出,当定位结果稳定时(AVEG<110),RRT目标区域的像素点均未达到饱和。
4.4 试验结论
从以上试验及数据可知,基于灰度信息的中心定位算法整体优于基于边缘信息的中心定位算法。为得到更为准确的定位结果,有以下几条可参考的结论:
1)椭圆拟合算法的定位精度与RRT图像的大小有关,目标直径与图像短边之比不应小于50%;图像大小对基于灰度信息的方法影响较小,但为保证测量精度,目标图像也不宜过大,以目标直径不超过图像短边的90%为宜。
2)采用点光源照明的特征是中间强、边缘弱,图像采集光轴与物面不垂直、光源对称性差等因素会造成照明中心偏离视场中心,给灰度中心定位方法带来影响。因此,在进行系统调整时,应采取措施保证光轴与物面的垂直度[10];采集图像时,目标应靠近视场中心。在进行基准尺标定时,应尽量使尺子两端的目标在视场中位置相近。
3)当图像亮度超过一定值后,中心定位结果随亮度增加而变化。在本文中以灰度均值AVEG作为亮度评价参数,为得到稳定的定位结果,AVEG不应超过120。一个更为直观的判据是,RRT图像中的玻璃微珠灰度不宜达到饱和值。
5 总结
本文对工业摄影测量系统基准尺校准中所采用的RRT显微图像采集系统进行了介绍;根据图像特征研究了适用于RRT显微图像的预处理、识别与定位等图像处理方法;并通过试验分析了影响目标定位精度的各种因素,包括标志图像尺寸、标志在视场中的位置和图像亮度等。
试验表明,在标志点质量良好、标志图像大小合适、标志位于视场中心且图像中各个像素灰度值均未达到饱和值时,基于逆反射标志边缘信息的椭圆拟合方法和基于灰度信息的灰度加权方法中心定位结果基本一致。椭圆拟合方法易受标志图像大小的影响;灰度加权方法易受标志偏离视场中心的距离影响;图像亮度对两种方法均会产生影响。整体来看,文中提出的两种定位方法,在不同条件下的重复定位误差均小于±0.2 pixels,满足逆反射标志中心定位的误差要求,且基于灰度信息的中心定位算法优于基于边缘信息的中心定位算法。以上结论为基准尺校准系统的图像调节给出实际的参考,有利于规范基准尺校准过程,并提高基准尺校准系统测量的稳定性与准确性。
