基于多阈值图像分割算法的秸秆覆盖率检测
2019-01-05刘媛媛王跃勇于海业秦铭霞孙嘉慧
刘媛媛 王跃勇 于海业 秦铭霞 孙嘉慧
(1.吉林农业大学信息技术学院, 长春 130118; 2.吉林农业大学工程技术学院, 长春 130118;3.吉林大学工程仿生教育部重点实验室, 长春 130025)
0 引言
秸秆还田是目前世界普遍重视的一项减少污染、培肥地力的增产措施[1-2],然而,秸秆还田检测面临点多面广、时间紧迫、难于量化、人员匮乏等实际问题[3]。
秸秆覆盖率是衡量秸秆还田的一项重要指标。近年来,利用机器视觉进行图像分割取得了一些的进展[4-8],这些方法虽能有效地分割识别出目标图像,但算法复杂,计算量大,且计算精度仍有待提高。秸秆覆盖率检测现场采集的图像中,秸秆覆盖与未覆盖图像颜色十分相似,杂草干扰较大,这些问题对高精度分割和所需目标的提取都造成了很大的困难。
提高计算精度的关键是图像中秸秆与背景土壤分割的准确性,而分割的关键是找到最优的分割阈值。传统的阈值选择方法太耗时,且计算量偏大。灰狼优化算法(Grey wolf optimizer ,GWO)[9]是一种群体智能优化算法,KHAIRUZZAMAN等[10]将其引入多阈值图像分割中,提高了分割效率。但单独处理复杂的问题时,易出现早熟现象,导致寻优效果和稳定性都不理想,且算法处理速度慢。差分进化算法(Differential evolution,DE)[11]是一种基于群体启发式搜索的高效全局优化算法。基于上述特点,本文提出一种差分灰狼优化(DE-GWO)算法,采用自适应Tsallis熵[12-13]作为算法的目标函数,以期快速准确提取目标图像。
1 整体设计
1.1 设计目标
秸秆覆盖率检测是基于机器视觉技术,结合秸秆覆盖率现场复杂的环境及图像灰度直方图[14]的特点,利用算法寻找最优阈值,准确快速地进行图像多阈值分割,计算出各部分的像素点个数,将秸秆部分的像素点个数与整幅图像的像素点个数相比,得到秸秆覆盖率
η=n0/n×100%
(1)
式中n0——秸秆部分像素点个数
n——整幅图像像素点个数
为了适应现场检测需求,更广泛快速处理田间大面积区域秸秆覆盖率检测问题,采用无人机高空俯视拍摄的图像作为处理对象。现场田间图像存在土壤、杂草、杂物等外界干扰,秸秆覆盖部分颜色和杂草颜色都极其接近,已还田部分颜色和土壤颜色接近,如图1所示。

图1 现场采集图像Fig.1 Field acquisition image1.秸秆 2.已耕作土壤 3.土壤 4.杂草
本文提出DE-GWO算法实现现场田间秸秆覆盖图像分割,在此基础上利用形态学算法[15]进行图像各部分的提取,以便于后续的面积计算。检测方法流程如图2所示。

图2 秸秆覆盖率检测方法流程图Fig.2 Block diagram of straw mulching rate
本文秸秆覆盖率检测方法是基于多阈值图像分割方法,可根据图像内容合理选择阈值数量,主要对图像灰度级进行分类。因此,灰度级范围在相同阈值区域内时,秸秆含水率、秸秆种类以及光照等条件不会对检测结果造成影响。
1.2 图像预处理
现场采集图像通常受限于光照条件和采集设备,具有明显的噪声,直接影响分割的准确性。针对噪声与实际情况下的图像光照强度不均等问题,采用基于频域的平滑滤波方法[16]对图像进行增强,可消除图像在数字化过程中的噪声点并修正图像的亮度不均问题。此外,将经处理后的图像转换为灰度图像,为后续基于灰度直方图的阈值分割做好准备。
2 多阈值图像分割算法原理
2.1 算法基本思想
获得精确秸秆覆盖率关键在于提取出的秸秆部分面积,阈值的选择很重要。基于图像的复杂程度,引入DE-GWO算法,核心是将GWO算法中的搜索机制嵌进DE算法循环中,采用自适应Tsallis熵作为目标函数,评估图像分割效率,使用GWO算法让灰狼个体的位置不断迭代更新,再利用DE算法的交叉选择维持种群的多样性,加快算法运行速度,最好个体狼位置即为最佳阈值。然后将最佳阈值代入实地采集的现场田间秸秆图像中,依据阈值对复杂的田间图像进行分割,提取出图像的各个部分,计算出秸秆覆盖率。
个体狼根据目标猎物更新自我位置,如图3所示,其中,围绕目标猎物产生个体狼8个可能位置,以右上角狼所在位置为例,GWO算法是根据调整系数向量和从而改变个体狼的位置。本文提出的DE-GWO算法是在GWO算法基础上,个体狼在围捕目标的过程中对自身位置进行DE算法中的交叉、选择操作,完成个体位置的局部优化,优化范围如图3中阴影部分所示,其中右上角局部区域为上述举例个体狼的优化范围。

图3 DE-GWO算法中个体狼围捕目标猎物优化范围Fig.3 DE-GWO algorithm optimal range of individual wolf hunting for target prey
狼群围捕目标猎物位置优化,见图4。其中,DE-GWO算法位置优化后的狼群(内部浅色个体)较GWO算法狼群位置(外围深色个体)更接近目标猎物,减少搜索围捕过程,大大降低了算法耗时。
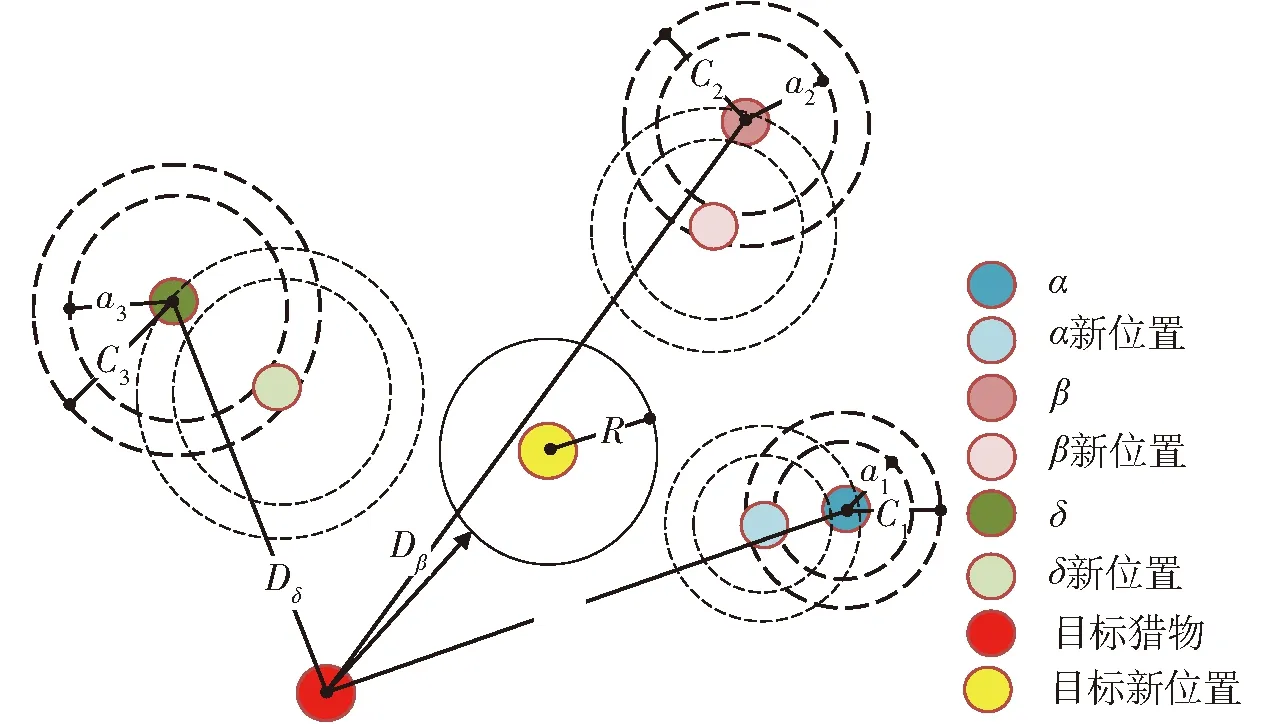
图4 DE-GWO算法狼群围捕目标猎物位置优化Fig.4 DE-GWO algorithm optimal positions of wolves hunting for target prey
2.2 自适应Tsallis熵
阈值分割的关键是找到合适的阈值,这也是本文算法的基础。在阈值分割技术中,选择熵准则确定阈值,现阶段,常见选用基于香农熵[17]的阈值分割方法,如Kapur熵[18]、Pun熵[19]等。然而香农熵是具有广延性的,这种性质忽略了子系统之间的相互作用,反映在阈值选择上忽略了目标和背景灰度概率分布之间的相关性。由于田间实际图像干扰因素较多,且图像灰度级相近。本文选择可以推广到非广义系统的Tsallis熵[20]作为核心算法的适应度函数。设一幅图像灰度级为G,灰度在图像中出现的概率为pi。Tsallis熵的离散定义为
(2)
式中Sq——Tsallis的熵值
q——调节参数
在单阈值分割情况下,设阈值z将图像划分为目标区域A和背景区域B两类,则这2个区域的灰度概率分别为
(3)
其中
wA+wB=1
这两个区域的Tsallis熵分别为
(4)
(5)
则总的Tsallis熵为
(6)

(7)
然而,虽然Tsallis熵能够增加算法灵活性和适应性,由式(2)可知,选择合适的q值是确定多阈值Tsallis熵的关键。利用分割图像的直方图均值来选择q值。在直方图上,当灰度级G=256时,设灰度级处于0~99的区域为灰度暗区,100~149的区域为灰度中区,150~255的区域为灰度亮区,自动选取参数q的方法为
(8)
式中V——阈值
l——灰度暗区灰度级
m——灰度中区灰度级
d——灰度亮区灰度级
根据分割图像的直方图均值选择不同的q,实现自适应Tsallis熵,达到更好分割图像的目的。
2.3 GWO算法原理
GWO算法是MIRJALILI等[9]于2014年提出的群体智能优化算法。模拟自然界中灰狼家族的社会等级制度和群体狩猎行为,主要通过能力最强(离最优阈值最近)的α狼带领次优的狼β和δ捕食(寻优)。
GWO算法模仿狼群狩猎行为过程中,主要分为包围、猎捕和攻击3个步骤[9]。狼群在寻找最优阈值的过程中首先对目标进行包围,该过程可表示为
D=|CXP(t)-X(t)|
(9)
X(t+1)=XP(t)-AD
(10)
其中
A=2ar1-a
(11)
C=2r2
(12)
式中t——当前迭代数
D——狼群与最优阈值之间的距离
A、C——系数向量
XP——猎物所在位置
X——狼群当前所在位置,即潜在阈值向量
a——递减参数(初始值为2,线性递减到0)
r1、r2——[0,1]之间的随机向量
在对猎物进行包围后,狼群实施猎捕行为,为了更好地搜寻到猎物位置(最优阈值),该过程通常是由α、β、δ来引导,其他的搜索单位ω应根据当前最佳搜索单位α、β、δ的位置更新它们各自的位置。该阶段的狼群位置更新表达式为
X(t+1)=(X1+X2+X3)/3
(13)
其中
(14)
(15)
式中X(t+1)——更新后潜在的最优解向量
Dα、Dβ、Dδ——狼群中剩余个体ω与α、β、δ间的距离
ω以这些距离为参照来更新各自位置,从而更加接近最优解。狼群狩猎过程的最后阶段是攻击,该阶段狼群需要完成抓获目标猎物,即GWO算法获得最优阈值。该过程的模型构建主要通过a值的递减来实现。
此时,灰狼算法结束迭代后的阈值可能会陷入局部最优解,不能准确分割图像,且实际采集的田间秸秆图像复杂使整个过程计算量大、耗时较长,因此,融入另外一种智能算法——DE算法。
2.4 DE算法原理
DE算法是1997年由STORN和PRICE[11]提出的一种基于种群迭代的高效的全局优化随机搜索算法。它也是基于群体的启发式搜索算法,群中每个个体对应一个解向量。DE算法的进化流程与遗传算法[21]非常类似,包括变异、交叉和选择操作,通过逐步迭代,不断进化,实现全局最优解的搜索。
从一个随机产生的初始种群开始,通过把种群中任意2个个体的向量差与第3个个体求和来产生新个体,然后将新个体与当代种群中相应的个体相比较,如果新个体的适应度优于当前个体,则在下一代中就用新个体取代旧个体,否则仍保存旧个体。通过不断地进化,保留优良个体,淘汰劣质个体,引导搜索向最优阈值逼近。
由于差分进化算法具有原理简单、控制参数少、鲁棒性强、收敛速度快等优点[22-24],将其与灰狼算法充分融合,通过不断迭代寻优,找到最适合的阈值进行分割。
入组及排除标准[3]:均符合糖尿病临床诊断标准;均知晓本次实验;对本次实验所用药物无过敏史;排除恶性肿瘤、酮症酸中毒、心力衰竭、急性感染、自身免疫性疾病、精神疾病等患者。本研究经医院伦理委员会同意批准。
2.5 DE-GWO算法原理
基于DE-GWO算法流程为:首先,灰狼的位置随机初始化,对初始的灰狼种群进行差分操作;其次,利用自适应Tsallis熵计算初始种群中每个个体的适应度,得到最优的3个值Xα、Xβ、Xδ;然后,将差分所得的狼作为GWO算法迭代收敛寻优的个体狼,通过式(14)、(15)进行位置更新,对GWO中更新的个体狼进行DE算法中的变异和交叉操作,使灰狼个体的位置再一次更新,根据式(11)、(12)中a和C的递减逐渐确定猎物位置;最后,重复上述过程直到达到最大迭代次数,得到的α狼位置即为最理想的阈值。算法流程如图5所示。

图5 DE-GWO算法流程Fig.5 Flow chart of DE-GWO algorithm
3 基于多阈值图像分割的秸秆覆盖率检测
3.1 模拟实验
将上述基于DE-GWO算法的多阈值图像分割方法用于秸秆覆盖率检测中,并验证算法的准确性与有效性。首先,选用一组模拟田间秸秆覆盖情况的图像,使用二阈值对其进行分割,如图6所示。通过手动分割与自动分割的匹配率、误分率以及准确率[25]来评判图像的分割效果。计算公式为
YMR=[(N1-|N2-N1|)/N2]×100%
(16)
YMER=[(N2-N1)/(mn)]×100%
(17)
YAR=YMR-YMER
(18)
式中YMR——匹配率,%
YMER——误分率,%
YAR——准确率,%
N1——自动分割图像目标像素
m——图像行像素点数量
n——图像列像素点数量

图6 玉米秸秆原始图像Fig.6 Original image of corn straw
采用PS软件中直方图手动精准检测面积作为手动标准分割方法。与DE-GWO算法进行比较的其他算法分别是原始GWO、加入惯性因子的改进PSO算法[26]。各优化算法的参数设置如表1所示。

表1 算法参数Tab.1 Algorithm parameters
实验环境为:Mircrosoft Windows 10 Professional, CPU: Inter Core i5-5200u@ 2.20 GHz,RAM:4 GB;Visual C++2010软件开发环境。为避免随机性,每幅图像运行30次,实验结果如表2所示。

表2 3种算法判定结果对比Tab.2 Comparison of three algorithms results
由图7~9可以看出,DE-GWO、改进PSO、GWO 3种算法分割效果接近,由表2可知,DE-GWO算法较改进PSO、GWO算法匹配率高、误分率小、准确率高;此外,DE-GWO算法较改进PSO算法的耗时缩短50%左右,较GWO算法缩短了近90%。说明DE-GWO算法准确率高、耗时短,证明算法分割效果相近情况下,DE-GWO的分割效率更高。

图7 DE-GWO算法分割图像Fig.7 DE-GWO algorithm segmentation images

图8 改进PSO算法分割后图像Fig.8 Improved PSO algorithm segmentation images

图9 GWO算法分割图像Fig.9 GWO algorithm segmentation images
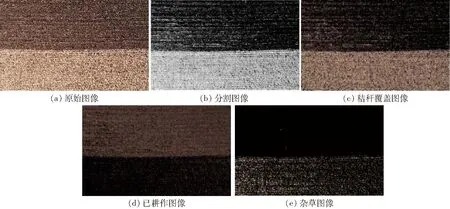
图10 二阈值分割图像Fig.10 Segmentation images using two thresholds
3.2 实际应用验证实验
在自然光照条件下,采用DJI大疆悟2代inspire2型无人机配X5S型云台相机,距地面50 m垂直拍摄采集,采集时间为2017年10月21日,地点为吉林省榆树市大岗乡。采用3组样本地块进行实验,利用所提出的DE-GWO算法,根据田间采集图像内容复杂程度而选取不同的阈值进行多阈值图像分割,分割得不同阈值对应的图像(图10~12)。以图12为例,根据灰度直方图利用本文所提出的算法找出4个最佳阈值将图像分为5个部分。灰度级处于0~56为已耕作部分,56~109为土壤部分,109~165为其他部分,165~214为秸秆部分,214~255为杂草部分。计算各部分所占地块面积,并计算出图像实际面积以及算法耗时,见表3。

图11 三阈值分割图像Fig.11 Segmentation images using three thresholds
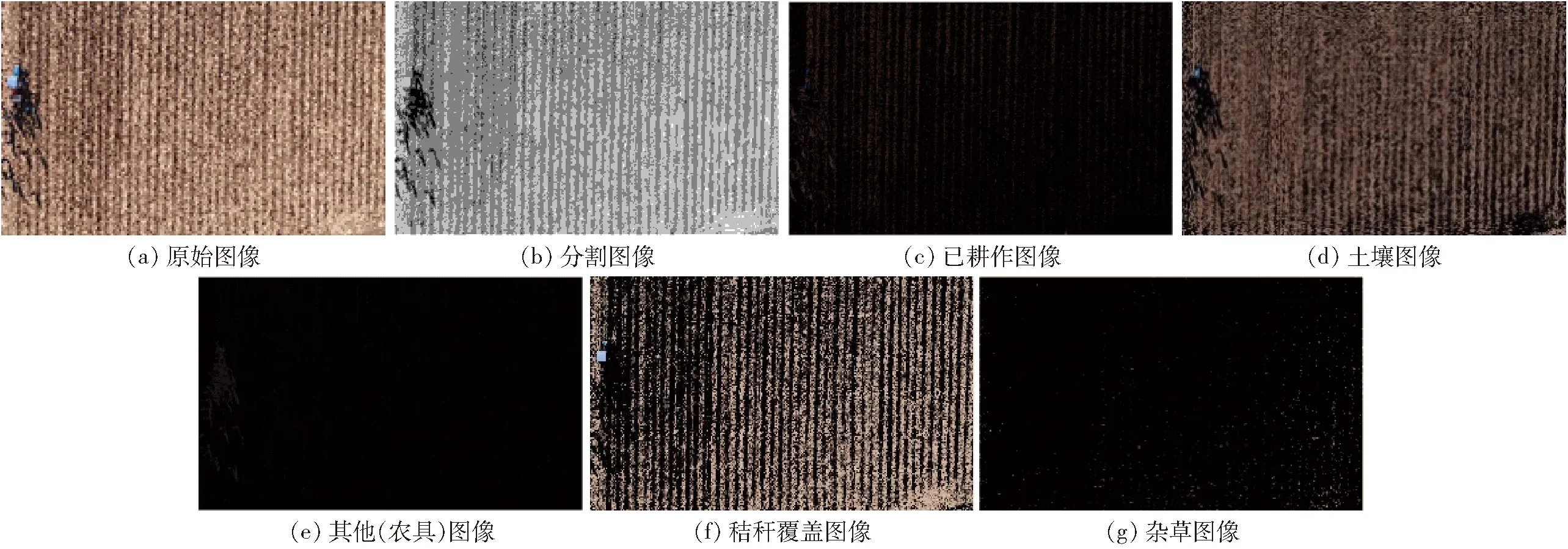
图12 四阈值分割图像Fig.12 Segmentation images using four thresholds
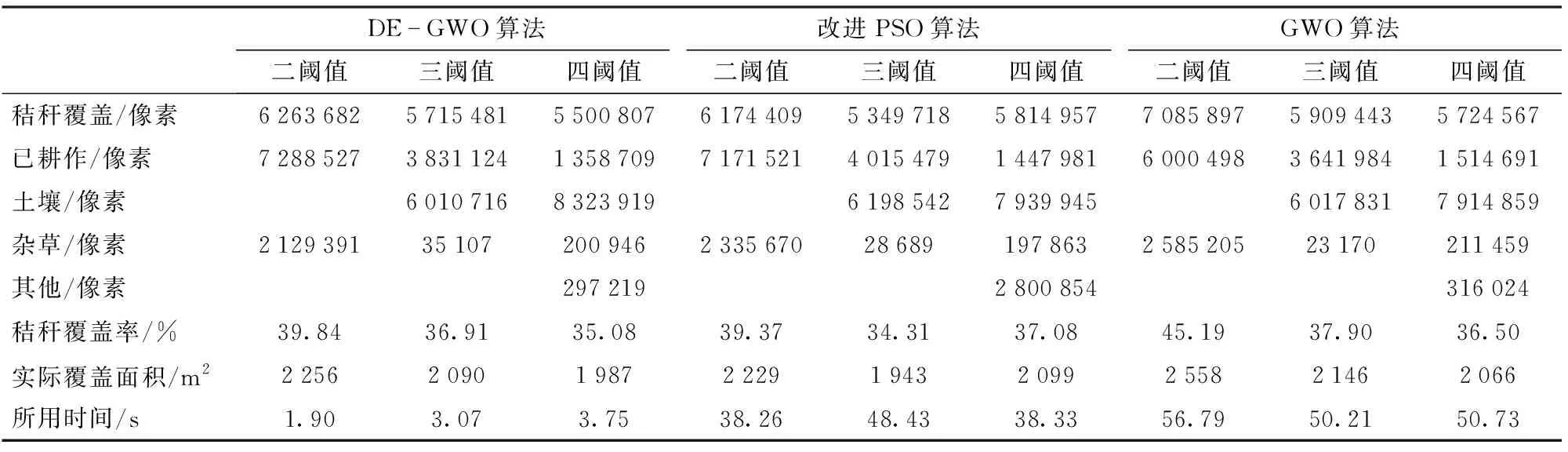
DEGWO算法改进PSO算法GWO算法二阈值三阈值四阈值二阈值三阈值四阈值二阈值三阈值四阈值秸秆覆盖/像素626368257154815500807617440953497185814957708589759094435724567已耕作/像素728852738311241358709717152140154791447981600049836419841514691土壤/像素601071683239196198542793994560178317914859杂草/像素212939135107200946233567028689197863258520523170211459其他/像素2972192800854316024秸秆覆盖率/%39.8436.9135.0839.3734.3137.0845.1937.9036.50实际覆盖面积/m2225620901987222919432099255821462066所用时间/s1.903.073.7538.2648.4338.3356.7950.2150.73
图像实际面积与无人机型号fov视角有关,本文图像与实际面积转换公式为
(19)
(20)
Sa=LaDa
(21)
式中Sa——实际面积
La——实际长度
Da——实际宽度
Ha——实际拍摄的高度
θ——相机的fov视角
考虑到采集图像中田间秸秆覆盖情况的复杂性,对本文提出的算法进行实际应用验证实验。由图10~12以及表3可以看出,本文提出的DE-GWO算法可以根据采集实际秸秆覆盖图像内容的复杂程度,实现图像多阈值精准分割,并计算出实际秸秆覆盖面积和秸秆覆盖率。与此同时,相比改进PSO和GWO两种算法,本方法大大缩短了图像分割处理的时间。
3.3 算法应用与人工处理对比实验
将实际采集的样本图像分别应用于DE-GWO算法不同阈值图像分割,将算法检测结果与人工拉绳法进行对比实验,结果如图13所示。

图13 不同阈值秸秆覆盖率对比Fig.13 Comparison of straw mulching rate with different thresholds

4 秸秆覆盖率检测系统
根据本文的分割方法,开发了一套秸秆覆盖面积计算软件系统。该系统主要包括图像显示、参数设置以及结果输出3部分,如图14所示。

图14 秸秆覆盖率检测系统Fig.14 Detection system of straw coverage
其中,采用路径选择方式对存储图像进行选择输入,后经算法处理的现场田间各部分分割结果一并显示在图像显示区域。算法选择可分为DE-GWO算法、改进PSO算法和GWO算法,用以进行算法对比实验。结果输出由像素点数量和相应参数比值两部分组成,包括原始图像像素A、秸秆覆盖部分像素B、已耕作部分像素C、土壤部分像素D和其他部分像素E,以及秸秆覆盖部分与原始图像像素比值B/A、已耕作部分与原始图像像素比值C/A、土壤部分与原始图像像素比值D/A、其他杂物部分与原始图像对比E/A。将本部分的比值加以转换得到实际面积,得出实际秸秆覆盖面积。
参数设置为系统子界面形式,如图15所示,主要用来预置算法和拍摄所用相机等参数的信息,为系统根据设置好的参数进行准确分割做好准备,包括算法种群规模、迭代次数,交叉概率的选择,及相机的fov视角、拍摄高度的设置。本部分可以根据实际情况随时进行参数设置,同时,也为工作人员的实际监测提供了软件系统平台。

图15 检测系统参数设置Fig.15 Parameter setting of detection system
5 结论
(1)提出了一种基于多阈值图像分割(DE-GWO算法)的田间秸秆覆盖率检测方法,实现了对秸秆还田覆盖率的精准检测,可完成实际面积转换计算。
(2)DE-GWO算法较改进PSO算法的耗时缩短50%左右,较GWO算法缩短了近90%,具有匹配率高、误分率小、准确率高、耗时短的特点。

(4)开发了一套秸秆覆盖率检测软件系统,可通过参数设置完成秸秆覆盖实际面积的转换计算,实现田间秸秆覆盖检测及信息存储。
