桥式起重机模糊自适应PID控制系统的应用
2019-01-04孙艳芬
孙艳芬
桥式起重机模糊自适应PID控制系统的应用
孙艳芬
常州机电职业技术学院机械工程学院, 江苏 常州 213164
伴随工业化的发展,桥式起重机逐渐实现智能化。其控制系统主要目标为快速、稳定的将货物运送到指定位置,以提高工作效率,降低操作的潜在危险性。为实现该目标,本文充分考虑起重机模型的非线性和不确定性,详细分析了小车-货物系统的数学模型,并提出了通过模糊自适应PID控制器对小车进行定位和防摇,此外,分别设计了小车定位和防摆控制器。仿真结果证明,该方法具有较强的可行性,有效地减少了工作时间,提高了工作的安全性,是桥式起重机理想的控制方法。
桥式起重机; 模糊控制器; PID控制器
桥式起重机具有结构简单,负载大和工作效率高的优点,被广泛应用于生产车间、货栈等场合,成为不可或缺的现代提升运输机械。在使用过程中,起重机具有较大的加速度,吊装货物出现较大的摆角,引起小车定位误差大,操作人员需重复多次定位,这不但降低了工作效率,而且存在较大的安全隐患。桥式起重机控制系统的核心是吊装和卸载货物准确、高效,为此,小车定位和货物防摇摆控制成为研究的重点。
桥式起重机智能控制方法的研究在提高货物运输效率、缩短产品生产周期中具有重要意义。作为一种智能控制方法,模糊控制不需要被控对象的准确模型,而且具有较强的适应性。在本文中,根据桥式起重机数学模型的非线性及不确定性,设计了模糊自适应PID控制器,该控制器结合模糊控制及PID控制优点,仿真实验结果表明该控制器具有很好的控制效果。
1 小车-货物系统数学模型
桥式起重机控制系统的主要功能是货物准确定位和减小货物摆角。如图1所示,沿小车的行走方向建立小车-货物系统模型。

图 1 桥式起重机小车-货物系统结构模型
系统中:—小车质量;—货物质量(忽略吊钩和绳索的质量);—绳索长度;—重力加速度;—小车位置;—货物摆角;—小车驱动力;1—吊索张力;—摩擦阻力。
利用拉格朗日方程得到小车-货物系统动态方程为:


2 控制系统设计
2.1 模糊自适应PID控制结构


图 2 模糊自适应PID控制系统结构
由桥式起重机的数学模型可知,起重机是一个多变量非线性系统,且具有较强的不确定性,使用传统的PID控制器,难以实现理想的控制效果。对于模糊控制方法,其对系统数学模型的依赖性不高,本文模糊自适应控制器的设计将模糊控制器和传统的PID控制器相结合,并将其应用于桥式起重机的控制系统。根据拉普拉斯方程,可得到如图3所示的控制系统框图。

图 3 桥式起重机控制系统结构框图
系统中,位置控制器的输入信号为小车实际位置误差和理论输入量;摆角控制器的输入信号为货物的摆角。该系统有效的控制了小车的位置和货物的摆角,并实现了整个系统的控制。
2.2 PID控制器设计
控制系统由两个模糊控制器组成,模糊自适应PID位置控制器的输入信号为小车的位置控制误差和误差的变化量,模糊自适应PID摆角控制器的输入信号为货物的摆角和摆角的变化量。输出信号为相应PID控制器修正控制参数DK、DK、DK。
根据系统控制需要,PID参数调节模糊控制器输入信号为和,输出信号为DK、DK和DK。模糊集定义为{,,,,,,}。对于位置控制器,输入域为[-1,1];DK、DK输出域为[-0.7,0.7];DK的输出域为[-0.5,0.5]。对于摆角控制器,的输入域为[-1,1],的输入域为[-0.5,0.5],输出域为[-1,1]。
模糊控制中基于总结技术知识和实际操作经验建立适应的模糊规则表。本文中所使用的模糊规则建立的方法是将经验归纳与实际操作测量相结合。建立的模糊规则如表1、表2、表3所示。

表1 DKP规则矩阵

表 2 DKI规则矩阵
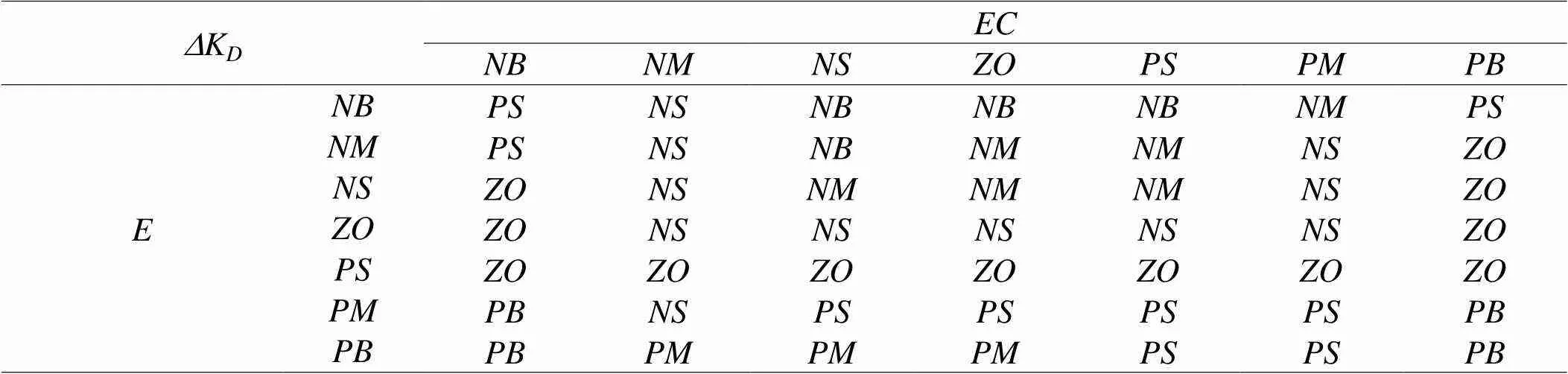
表 3 DKD规则矩阵
结合模糊控制器的输出量,修正相应PID控制器的三个控制参数,利用初始值,得到的PID控制器的实时参数方程如下:

式中,K,K和K为PID控制器的三个原始参数;DK,DK和DK为三个控制参量的修正值;K,K和K为瞬时值。
3 系统仿真
在系统仿真中,首先在MATLAB模糊工具箱中设计模糊控制器。在模糊工具箱的隶属函数编辑器中,选择输入格式为gaussmf的和隶属函数及格式为trimf的DK,DK和DK隶属函数。摆角控制器输入信号的隶属函数如图4所示,输出信号DK的隶属函数如图5所示。
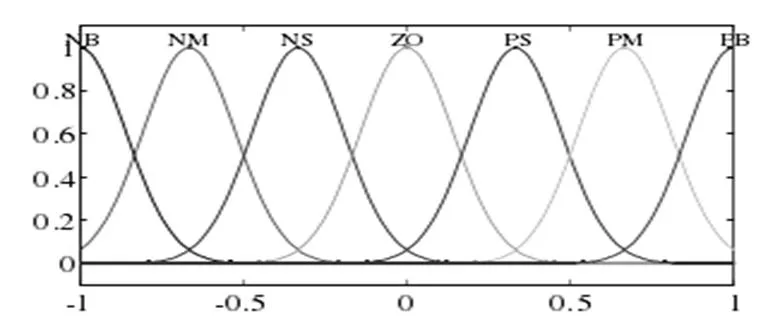
图 4 摆角控制器输入量E的隶属函数

图 5 摆角控制器输出量DKP的隶属函数
打开规则编辑器窗口,写入模糊控制规则,建立FIS文件,完成与Simulink模糊工具箱的链接,从而为建立模糊自适应PID控制器奠定基础。文中对起重机系统的两个模糊自适应PID控制器设定初始值,位置控制器的初始参数值取20、0.08、0.3,摆角控制器的初始参数值取2,4.5,0.3。利用MATLAB中的Simulink建立控制器的仿真模型,位置控制器的仿真模型如图6所示。
为了使小车-货物系统的仿真模型最大程度的接近实际模型,根据实际使用情况确定模型参数,令=2.5 kg,=5 kg,=2 m,=9.8 m/s,=0.02。根据桥式起重机控制系统结构及数学模型,通过Simulink建立桥式起重机控制系统仿真模型,如图7所示。

图 6 位置控制器仿真模型

图 7 桥式起重机控制系统仿真模型
仿真结果如图8、图9和图10所示。

图 8 小车位置仿真结果
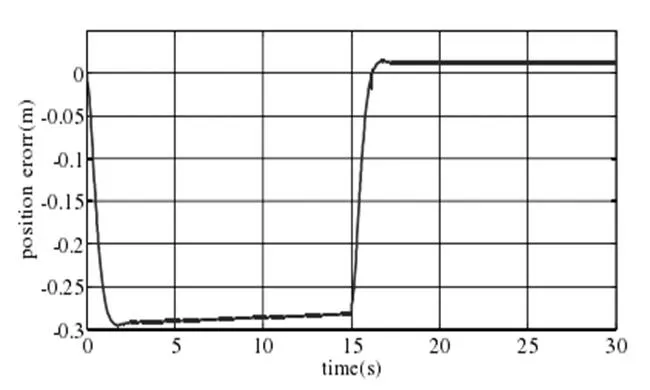
图 9 定位误差

图 10 摆角仿真结果
由仿真曲线图中的位置曲线和位置误差曲线可知,小车快速、稳定的到达设计位置,且误差较小,约等于0.01 m。如图9所示,系统无定位超越量。如图10所示,货物摆角在小车加速和减速的时候达到最大值,摆角的最大值为2°,之后2 s左右迅速减为零,且无往复震荡现象,这对于货物准确定位和安全运输具有重要意义。
由仿真结果可知,模糊自适应PID控制器可满足桥式起重机控制系统的使用需要,该控制方法很大程度上提高了其工作效率和工作安全性。
4 结论
本文针对桥式起重机使用过程中出现的货物定位不准和摆角大的问题,设计、应用了模糊自适应PID控制器的控制系统,该系统由定位控制器和防摆角控制器组成,具有响应速度快、安全可靠的特点。对其应用MATLAB进行仿真,仿真结果表明,该系统能够对货物准确定位,减小摆角,且无往复震荡现象,有效的提高了起重机的工作效率和工作安全性。
[1] 王玥媛.基于模糊控制的桥式起重机防摆研究[D].大连:大连理工大学,2008
[2] 王彦凯.桥式起重机运行机构制动控制系统的研究[D].大连:大连理工大学,2013
[3] 胡一倩,吕剑虹,张铁军.一类自适应模糊控制方法研究及在锅炉汽温控制中的应用[J].中国电机工程学 报,2003(1):137-141
[4] 丁永生,应浩,任立红,等.解析模糊控制理论:模糊控制系统的结构和稳定性分析[J].控制与决策,2000(2):129-135
[5] 田凡.电液伺服系统模糊PID控制仿真与试验研究[D].太原:太原理工大学,2010
[6] 赵笑笑.基于模糊理论与常规PID控制的模糊PID控制方法研究[J].山东电力技术,2009(6):54-56,63
Application of Fuzzy Adaptive PID Control System in Bridge Crane
SUN Yan-fen
213164,
With the development of industry the bridge crane develops into intelligence, the main case of its control system is that the load reach the designated position rapidly and steady so it can improve the work efficiency, and decrease the hidden dangers during its operation. To solve this problem and due to nonlinear and uncertainty of the crane model, in the paper shows a detailed analysis of the mathematical model of cart-load system and proposes the method of positioning and anti-swing using fuzzy adaptive PID controller, further more, it designs two controllers for the cart position and swing angle respectively. The simulation results prove the feasibility of this method and it can reduce the working time effectively and improve the working safety factor. It is an ideal control method for bridge crane.
Bridge crane; fuzzy controller; PID controller
TP29
A
1000-2324(2018)06-1020-04
10.3969/j.issn.1000-2324.2018.06.023
2017-12-26
2018-02-07
孙艳芬(1980-),女,硕士,讲师,研究方向:机械设计与制造. E-mil:781122176@qq.com
