新型自动化圆筒式自行车库系统设计
2019-01-03陈飞跃殷华锋涂亚东徐小兵
陈飞跃,殷华锋,涂亚东,杜 娇,徐小兵
(长江大学 机械工程学院,湖北 荆州 434020)
0 引言
国内外立体自行车库基本很少。现阶段,共享单车的乱停乱放,车辆损坏量大等问题层出不穷;并且对共享单车的大量涌入问题仍无有效的解决办法。因而设计新型圆筒式自行车库及其液压控制系统并配合ZigBee(无线传感器)技术以保证车库的高效,高自动化运作,可有效解决城市中共享单车多、乱、损耗大等问题。
本文研究的新型自动化圆筒式自行车库,以一种新结构圆筒式车库为载体;其具有存储容量大、占地面积极少、车辆存取方便快捷、可有效减少车辆损坏率等优势。且依据车库的结构特点及功能实现,采用PLC控制器充分提高其对城市内复杂环境的适应性及抗干扰性。
1 圆筒式自行车库的结构及工作原理
该车库含有阶梯型存车架,存车架下部以三角支撑,上部有电磁夹持固定装置。整体车库放置于地下,提升机构与转运机构位于存车库轴线处。抓取机械手与转运小车固联,转运机构与提升机构固联。其结构如图1所示,内部具体结构如图2、图3所示。

1.顶端固定圆盘 2.顶端旋转固定总成 3.齿条立架 4.平衡立柱 5.转运轨道总成 6.机械手总成 7.移运小车总成 8.底端液压马达总成 9.底端固定座 10.停车立架单元 11.提升装置总成 12.停车轨道架图1 自行车库结构图
存放过程:提升移运机构初始于顶端,且移运轨道与存取口轨道平齐;自行车停于存取口固定位置处,接着移运小车移至固定位置,随之机械手夹紧自行车前轮内毂,并稍提起一定高度,之后将自行车移至移运轨道上,移运完毕即停止工作;提升机构载着自行车及移运装置上下移动和转动,至存车位置处即停止工作;移运小车推动自行车移向存车轨道架,到指定位置处即停止工作,同时存车轨道上所对应的电磁固定装置以轨道上的压力传感器控制对自行车进行夹持固定,之后机械手释放自行车前轮;最后位置复位。
取车过程:用户以刷卡取车,整体机构接收到刷卡信号后,提升机构移动及转动至取车位置处,接着与停车过程相同;待移运完成,提升机构载着自行车回至顶端,之后移运小车将自行车移至出口处,用户即可取车;最后位置复位。

1.平衡立柱 2.移运小车总成 3.移运架总成 4.提升机构 总成图2 内部转运机构整体图
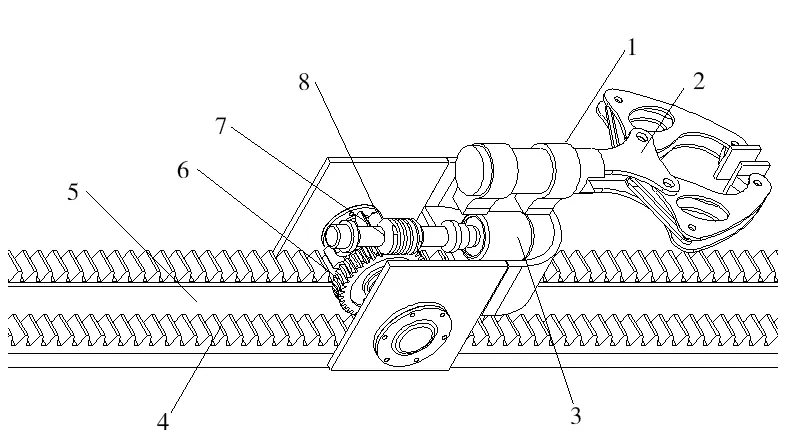
1.机械手支撑架 2.机械手 3.液压马达 4.齿条 5.移运轨 道 6.涡轮 7.蜗杆 8.齿轮图3 转运机构内部结构图
2 液压系统原理分析
对圆筒式自行车库液压系统进行分析,按其功能实现分为:旋转提升液压系统及平移转运液压系统。所有控制阀均采用电磁和手柄2种操作模式,以便故障时,采用手动应急模式。整体液压系统原理如图4所示。

1.过滤器 2.冷却器 3.电机 4.双联泵 5.恒功率变量泵 6.电磁溢流 阀 7.升降液压马达 8.底部旋转液压马达 9.移运液压马达 10.机械 手液压缸 11.支撑液压缸 12.电液比例调速阀 13.电液换向阀 14.限 速阀 15.液压锁 16.缓冲阀图4 液压系统原理图
2.1 旋转提升液压系统分析
该液压系统采用闭式液压回路。系统有1台双联泵供油,2台定量液压马达驱动升降移运,1台定量马达驱动旋转提升,各马达之间为并联连接。开机定量泵稳定供油,电磁溢流阀稳定油压;电液换向阀控制各液压马达的正转、反转和停止;电液比例调速阀控制各液压马达的快转和慢转;为防止重力超速,对升降回路安装有限速阀。
为保证提升平台升降回路中的同步驱动,计算机采用主从式同步控制,使其中一个回路作为主回路依照系统设定的速度运行,以主回路执行构件位置输出为理想输出,从回路为随动回路,实时跟踪主回路的理想输出并达到同步驱动。
2.2 平移转运液压系统
该液压系统有1台双联量泵,1台恒功率变量泵及1台定量液压马达。定量泵供油,并通过电液比例调速阀及电液换向阀的共同调节实现对移运小车液压马达的正转、反转、停止、快转及慢转的控制。变量泵供油,分别供给支撑液压缸和机械手夹持液压缸。支撑液压缸通过电液换向阀控制液压缸的收缩与伸长;因小车前端只需抬起一小段高度即在其油路中加入电液比例调速阀。机械手液压缸通过变量泵本身系统压力的变化,自动调节流量,并配合机械手夹持块处的压力传感器实时反馈夹持压力的变化,进而有效夹紧部件。
移运液压马达经蜗轮蜗杆驱动齿轮,实现小车沿移运轨道平移;支撑及夹持液压缸通过阀及变量泵的共同调节实现推、收动作。夹紧及支撑液压缸均安装有液压锁,以保证运行的安全性。
3 控制系统设计
采用可编程控制器(PLC)控制及配合ZigBee技术(无线传感器)、人机交互技术,共同实现系统的一体化控制。ZigBee技术的原理如图5所示。系统流程以存、取两个单独控制模块系统指出PLC控制的具体工作。
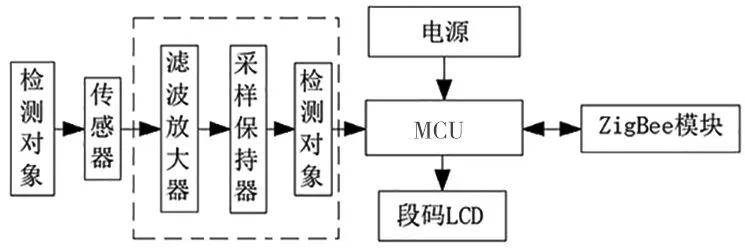
图5 无线传感器基本原理图
3.1 电气控制原理
按照输入的指令信号PLC控制各个电磁阀,根据位移传感器、角位移传感器及压力传感器的反馈信号与指令信号相比较,构成3个闭环控制系统;以实现位置定位、角度定位及加持力大小定值。
电控系统主要由电源、控制主机部分、各传感器、电机、人机交互界面组成,PLC系统经UPS电源将市电220V交流电转换为控制系统所用的24DC。其系统结构框图如图6所示。

图6 电控系统结构框图
3.2 系统流程
以存、取两个不同的工作方式,对其分别进行流程控制,如图7、图8所示。

图7 取车流程图

图8 存车流程图
存、取车流程分别定义了各个功能部件的动作步骤,对于关键步骤的配合和连锁需进行条件判断,即满足条件则执行下一步骤,否则进入循环等待。该控制系统通过PLC的顺序控制、相关继电器的使用及传感器实时反馈处理,实现自动化圆筒式自行车库的自动控制。整体系统以存、取两个独立的功能模块运行,分别以高度集装模块化设计实现存、取动作的独立性及快速性。
4 结论
根据共享单车的高速发展,针对单车随意停放、停车占地面大等问题设计了新型自动化圆筒式自行车库结构。通过对车库的液压及控制系统设计可得以下结论:
(1)基于圆筒式自行车库的结构及运动原理的分析,保证了自动化控制、液压系统设计的具体性、可行性;
(2)液压系统采用三回路设计,控制阀处均有手柄操作,提高了整体装置的安全性、可靠性;
(3)系统对相应传感器的实时反馈数据进行分析比对,实现了整体装置准确、稳定的运行;
(4)本设计可有效解决现有共享单车乱停、乱放、占地面积大、车辆损耗大等问题,为共享单车的快速发展带来了更加经济、便利的存取方案且具有广泛的应用前景。