下滑指示器在舰船摇摆过程中的位移变化分析∗
2019-01-03
(91404部队 秦皇岛 066000)
1 引言
舰载直升机以舰船为基地在海上执行任务,由于舰船甲板面积有限,为确保舰载直升机在夜间或白天低能见度的情况下顺利返航、并在甲板平台安全降落,国内外搭载直升机的多数舰船都在舰船后部机库和甲板平台配备了直升机着舰引导助降装置,目前使用最多的是法国研制的直升机助降灯光系统,其中下滑横摇指示系统是核心灯光助降装置。
随着舰载直升机使用条件日渐复杂,在特殊条件下,尤其是边界海况条件下,装备的下滑指示器会随舰艇摇摆产生较大位移,造成灯光失准,对直升机着舰造成不利影响[1]。本文以下滑指示器为分析对象,结合舰船运动特性,建立了灯光位移与舰艇纵横摇角度之间的数学关系,通过仿真计算手段,对灯光位移进行量化。
2 下滑指示器工作原理简介
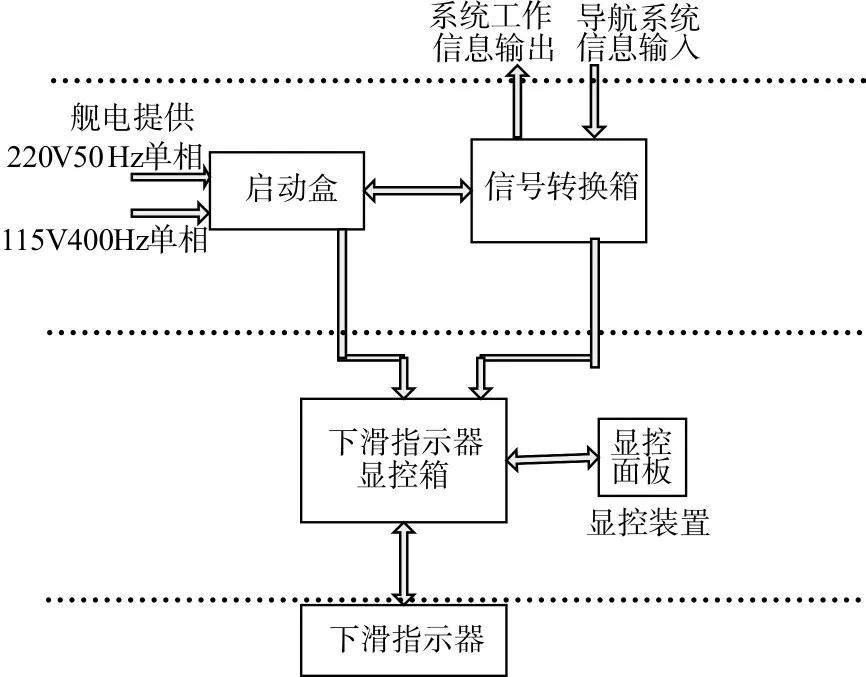
图1 下滑指示器工作原理框图示意图
下滑指示器是下滑系统的主要组成部分,是在夜间或低能见度时引导直升机以正确的航向和下滑角安全返航的信号装置。其工作原理为:实时接收舰上导航信息,通过在空中形成红、绿、黄三色光带向飞行员提供直升机下滑的正确轨迹,下滑引导光束能在直升机偏离下滑轨道时,通过不同颜色的光束能对驾驶员起到警示作用,同时下滑指示器根据舰艇横摇纵摇信息调整内部伺服装置,使下滑灯带不随舰艇摇摆而产生位移。
工作流程图如图1所示。
3 位移量化分析
以某型舰艇下滑指示器为例,下滑引导光束的水平张角为30°,轴线两侧各为15°,下滑引导光束呈扇形,垂直张角为14°。黄光区的垂直张角为8°,红光区的垂直张角为4°,其上界面与水平面成3°,下界面与水平面成-1°;绿光区的垂直张角为2°;其轴线与水平面成4°[2]。灯带示意图如图2所示。
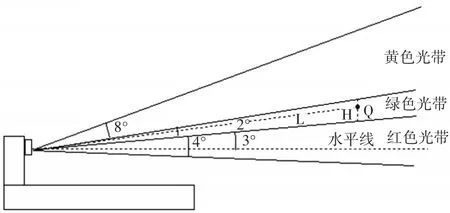
图2 下滑指示器灯带示意图
图中,Q点为直升机所在位置,距离起降平台着舰区距离为L,Q点所在处绿色光带的高度为H,由于绿色光带的宽度较小,仅为2°,H大小可近似为以L为半径,P点为圆心的圆弧长即:,通常直升机下滑指示器的作用距离为夜间大于3n mail,到达距离舰艉100m后通过横摇指示器进行引导着舰,因此L变化范围在100m~3n mail之间,可以求得 H的变化范围在3.49m~192m之间,即距离母舰越近,灯带的高度度越窄。同理可以求得下滑指示器灯带的宽度变化范围为52m~2907m。
直升机下滑时,俯角相对大地是固定的,因此要求下滑指示器发出的引导光束在空间也是稳定的,但由于舰体的结构形式及使用要求的限制,下滑指示器的实船安装位置一般不在母舰的摇摆中心,而是位于机库门左侧上方,如图3所示。下滑指示器伺服系统虽能使下滑引导光束相对大地保持水平,但无法消除因下滑指示器安装位置偏离舰船摇摆轴心而产生的下滑引导光束在空间的位移。

图3 下滑指示器安装位置图
为分析舰艇横纵摇对下滑指示光束带来的影响,建立坐标进行数学建模,当舰艇静止时,舰船稳心为O点,舰艇纵摇轴方向为X轴,横摇轴方向为Y轴,按照右手定则Z轴垂直于XOY平面向上[3],坐标系如图4所示。

图4 建立坐标系示意图
设定下滑指示器的初始位置坐标为P(x0,y0,z0),实际航行过程中,横摇与纵摇是同时存在的,舰艇产生横纵摇时,下滑指示器实际位置坐标为位置关系如图5所示。
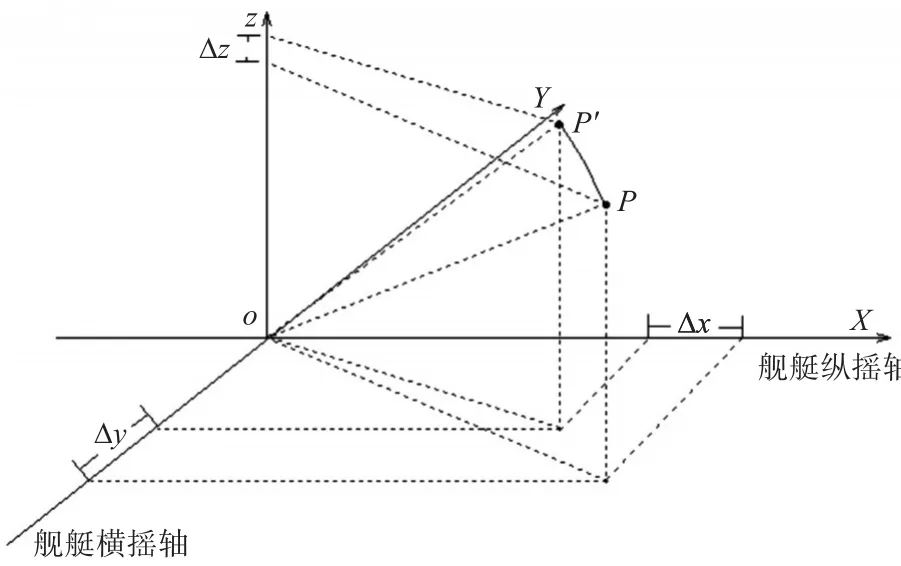
图5 舰艇横纵摇带来的灯光位移图
Δx-舰艇横摇在纵摇轴方向产生的位移;Δy-舰艇纵摇在横摇轴方向产生的位移;Δz-舰艇纵横摇在垂直方向上产生的位移和。
若在某一时刻舰艇的横摇角度为θ,纵摇角度为β,由于横摇与纵摇是相互独立,因此,为分析下滑指示器在某时刻的位移,现对舰艇运动进行横摇方向和纵摇方向分解,分别分析。
1)横摇带来的下滑指示器的位移
为分析横摇位移,建立如下坐标系,以舰船横摇中心为原点Oh,横摇轴方向为Yh,纵摇轴方向为 Xh,垂直 XhOhYh平面向上为Zh。
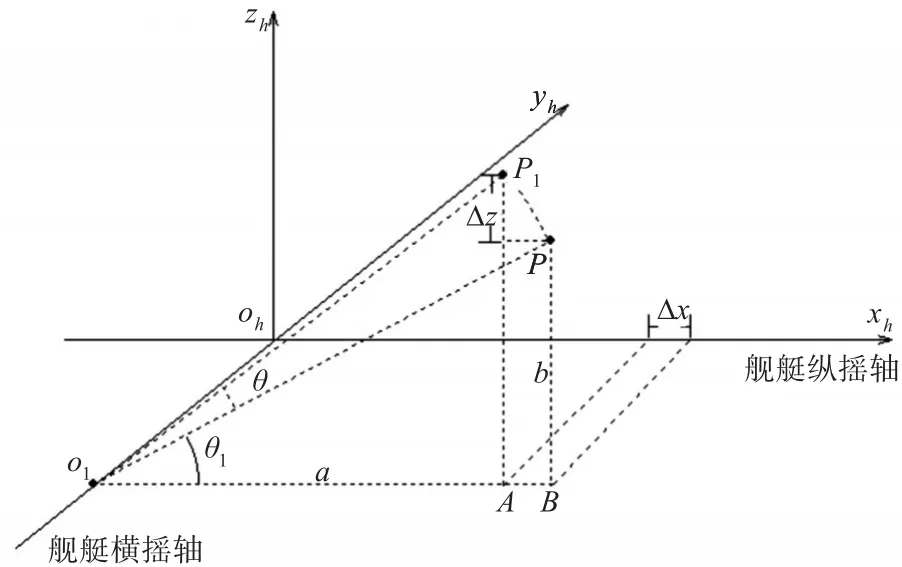
图6 舰艇横摇带来的灯光位移示意图
如图6,舰艇在横摇过程中下滑指示器位置由P移至P1,图中各参数如下:
θ为舰艇横摇角度,即∠P1O1P;a为P点与舰艇横摇轴间的水平距离;b为P点与舰艇横摇轴间的垂直距离。
Δz1-舰艇横摇导致的下滑指示器在垂直方向上的位移。

2)纵摇带来的下滑指示器的位移
图7 舰艇纵摇带来的灯光位移示意图
如图7,舰艇在横摇后再进行纵摇,过程中下滑指示器位置由P1移至P',图中OzXZYZZZ坐标系是舰艇经历横摇后,以纵摇中心为原点Oz,舰艇纵摇轴方向为Xz轴,横摇轴方向为Yz轴,垂直于OzXZYZ平面向上为ZZ轴,建立的坐标系,各参数如下:
β为舰艇纵摇角度,即∠P1O2P';c为下滑指示器与舰艇纵摇轴间的水平距离;d为下滑指示器与舰艇纵摇轴间的垂直距离;Δz2为舰艇横摇导致的下滑指示器在ZZ轴方向上的位移。将下滑指示器在OzXZYZZZ中的位移转换至OXYZ坐标系,有以下关系:

通过上述理论计算公式可以看出,驱护舰下滑指示器产生的位移是与横摇角度、纵摇角度、舰艇横摇轴位置、舰艇纵摇轴位置有关的物理量,通过对其进行数学建模,形成定量分析数据图,并以此为基础,开展下一步解决影响位移的方法的研究。
分析图8~图10,可以看出,由于横摇引起的横向位移在4m之内,由于纵摇引起的艏向位移不足1m,二者相对于灯带52m~2907m的宽度范围来说影响较小。由于横纵摇引起的垂直方向位移范围在3m左右,相对于绿色灯带3.49m~192m的高度范围,影响较大,尤其在直升机接近舰艇时,大角度的横纵摇产生的垂向位移已接近于绿色灯带的高度,造成的影响越发明显,即使飞行员在下滑过程中处于正确的下滑通道中,在最后进近阶段,也可能会由于舰船摇摆导致原本观察到的绿色灯光变为红色或黄色,造成飞行员的判断失误,对飞机的姿态进行错误调整,影响着舰效率,甚至造成着舰事故。

图8 下滑指示器横向位移随横摇角度变化曲线
图9 下滑指示器舰艏向位移随纵摇角度变化曲线

图10 下滑指示器垂直位移随横纵摇角度变化曲线
4 结语
本文提出了当前装备于舰船上的下滑指示器存在的灯光偏移问题。为进一步明确偏移的位移量大小,文中采用数学建模方法,通过矢量分解,分别建立灯光在舰船横向、艏向、垂向的位移与舰船横纵摇角度之间的数学关系,绘制出灯光位移与舰船横纵摇角度对应的关系曲线。文中所得结果,为解决今后下滑指示器灯光位移问题提供理论计算依据,建议在今后,利用所得结果,通过调整灯光使用方法或改进下滑指示器结构等手段,消除下滑指示器位移带来的不利影响。
