基于PCA与SPRT的机械故障诊断方法研究
2019-01-02黄文健黄瑾珉曹承昊陈汉新
黄文健,黄瑾珉,曹承昊,陈汉新
武汉工程大学机电工程学院,湖北 武汉 430205
齿轮箱是很多机械设备中重要的部件,其常被用来传递动力、改变转速、分配动力等。在实际应用中齿轮箱的工作状态与设备的运行状态息息相关,而其中的齿轮,轴,轴承等零部件长期在高负荷状态下运行,故障率较高,很容易引发机器故障。在齿轮箱部件失效中由齿轮故障引发的约占60%[1],因此对齿轮箱中齿轮故障诊断的研究就显得很有必要了。
齿轮常见的故障有齿轮磨损、齿面胶合和擦伤、齿面接触疲劳和断齿等。在本次实验中,选取齿轮裂纹来模拟齿轮故障,得到的实验信号掺杂着许多噪声,所以采用小波包变换对信号进行降噪[2],之后再提取特征。主元分析法(Principal Component Analysis,PCA)[3]是将多个线性相关变量压缩为少数几个不相关的变量的一种多元统计方法。叶永伟等[4]用PCA来对设备特征进行提取;杜振宁等[5]将小波包分解与PCA相结合来对轴承进行故障诊断。由于PCA具有概念简单,计算方便等优点,因此常被用来对数据进行降维。
Wald[6]在1947年的著作中系统地介绍了序贯概 率 比 检 验(Sequential Probability Ratio Test,SPRT)。由于其具有简单、高效等特性,因此近些年来在故障诊断方面使用非常普遍。Goodman等[7]将SPRT与自适应波形结合起来识别雷达信号;Ray等[8]将SPRT应用在核电站和飞行器的故障检测与识别;CHEN等[9-10]将SPRT用于齿轮裂纹的故障诊断。SPRT与固定样本检验不同之处在于这种算法需要更少的平均样本量,但是却具有更高的检验效率。
在齿轮的故障诊断中,为了避免直接从众多特征参数中选取SPRT的参数,本文将PCA与SPRT相结合起来应用于齿轮裂纹的故障诊断。实验中采集的信号在降噪之后,利用PCA来处理信号的特征数据并选择合适的主元作为检验参数以提高检验的准确度与可靠性,通过分析最后得到的结果图来进行识别与分类[11-12],结果表明该方法是有效的。
1 PCA
特征提取是从信号里提取有效信息的过程,适当的方法和有效的特征对后续过程很有帮助。在很多研究中对数据进行降维会使之后的计算分析更加的高效与简便。在用PCA研究多变量问题时,实际上是通过线性变化将数据从高维空间映射到低维空间,低维空间中较少的新变量能集中地反映原始变量中包含的绝大部分信息。其基本方法是将数据矩阵的协方差矩阵的特征值按大小进行排序,以此顺序计算各个主元及其贡献率,之后选取满足要求的主元从而达到降维的目的。目前PCA已广泛用于特征提取、数据降噪以及故障重构等方面。
PCA的基本原理如下:设原始数据样本包含m个n维特征向量 Xk=( x1,x2,… xn)T,则PCA具体步骤如下:
计算样本的平均值:

求出样本向量的协方差矩阵:

计算S的特征值 λ1,λ2,…,λn及其对应的特征向量 v1,v2,…,vn。
计算各主元的贡献率和累计贡献率:

选取前p个累计贡献率满足要求的主元作为映射矩阵,将原始信号变换到特征空间:

式(5)中,V=(v1,v2,…vp)。
2 SPRT理论
SPRT的基本原理为:设 x1,x2,…,xn是一组独立同分布的随机变量序列。对于这样的总体样本值,提出两个假设,零假设(H0∶θ=θ0)和备选假设(H1∶θ=θ1)。它们的联合概率密度可以定义为:

其中j=0,1,检验的似然比计算如下:

式(1)中,f(x/θ)为条件概率分布;θ为分布参数。
在以前的检验中,当λn的值在阈值C附近时,对两种假设的接受与否的判断显得不够合理。而Wald改进的地方是当 λn远小于C时接受 H0,当λn远大于C时拒绝 H0,当 λn与C很接近时暂且不做出判断,而是再继续检测λn+1,直到之后的似然比远大于或远小于C为止。
在SPRT中,事先给定两类错误的概率α与 β的值,则阈值A、B可以按照下列公式来确定:

检验判断准则为:代入观测值x1,计算λ1(x),若 λ1(x)<B,则停止观测并接受零假设 H0;若λ1(x)>A,则停止观测并接受备选假设 H1;若A≤λ1(x)≤B,则继续进行检验,直至似然比值满足上述两种情况为止。
3 实验系统
选取正常齿轮F1和有裂纹的故障齿轮F2、F3进行实验。齿轮裂纹全深度a=2.4 mm,裂纹全宽度b=25 mm,厚度为0.4 mm,齿轮裂纹的角度为45°。实验中齿轮箱为空载状态,转速为800 r/min。3组齿轮的参数如表1所示。

表1 三种故障模式Tab.1 Three fault modes
图1是齿轮箱的结构图。在运行中齿轮3和4之间会产生振动,因此可以任选其中之一来模拟故障。本次实验选择用齿轮3来进行模拟实验。
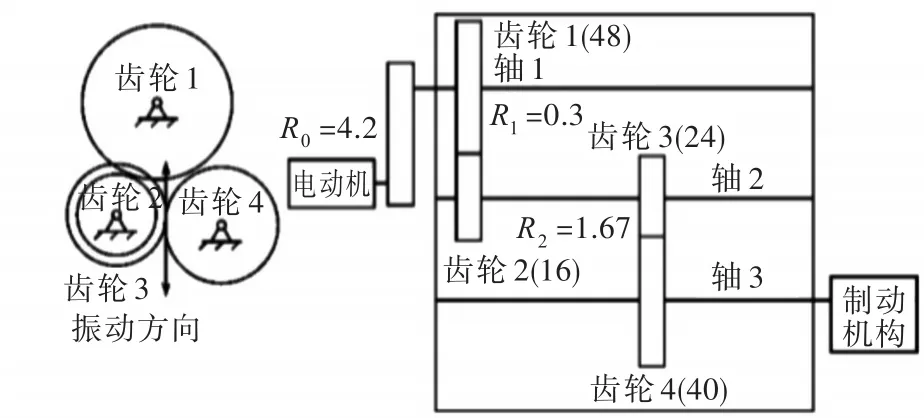
图1 齿轮箱结构图Fig.1 Structure of gearbox
齿轮箱信号采集系统如图2所示,将加速度传感器安装在齿轮箱的水平垂直两个方向上,通过动态模拟器采集振动信号,并通过信号分析器将信号输入并存储在计算机中,本文仅研究分析水平方向的信号。分别用S1、S2和S3表示正常情况与两种故障情况下的信号。

图2 齿轮箱信号采集系统Fig.2 Signal acquisition system of gearbox
4 齿轮裂纹的故障诊断
4.1 小波包降噪
小波包变换将同时分解信号的低频和高频部分,这有利于有效地区分信号中的噪声。对实验信号进行3层小波包分解,得到8个频带的分解信号后再重构信号。这样重构后的信号会更准确。
4.2 选取与计算特征参数
振动信号的特征信息是通过一些特征参数来表达的,每个特征参数都能反映该信号的某种特性,平稳的振动信号表明齿轮箱运行正常,而异常的或是有较大波动的振动信号则表明齿轮箱出现了故障。在常用的时域特征参数中,均值能反映信号波动能量的大小;有效值是描述动态信号强度的指标;标准差是描述信号的波动分量;峭度指标能反应振动信号中的冲击特征;波形指标是反映信号偏离高斯分布程度的指标;脉冲指标与峰值指标都是用于检测信号中有无冲击的指标;裕度指标常被用来检测机械设备的磨损状况[13-15]。本文选取这8个参数指标进行计算。假设xi=[x1,x2,…,xN]是一组离散待检信号,N=8 192。每组取1 024个检验点,这样可以得到7196组检验数据。
对实验信号进行降噪之后再提取特征值,本文中n=1 024,特征参数的计算公式如下:

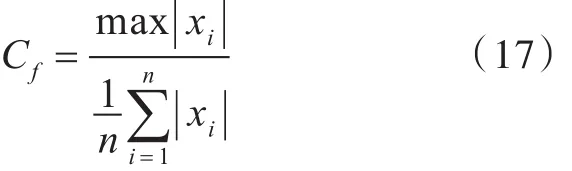
将经过预处理的振动信号代入公式中分别计算,得到齿轮箱在3种状况下的3组信号的8种特征参数。
4.3 特征参数的降维
对上述3组数据进行PCA处理,根据得到的结果来选取待检验的序列。
经过PCA处理之后,根据贡献率的高低来对处理后的主元进行降序排列,排序越靠前的主元保留的原有信息越多。在得到的处理结果中,通常是选取累计贡献率高于85%的前几个主元,这样选取的主元才能包含足够多的原有信息。
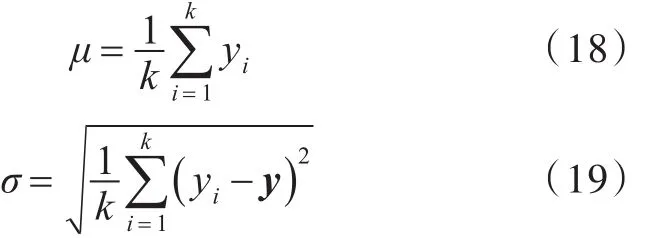
这些特征值经过PCA处理之后,前4个主元就能得到超过85%的信息。这里选取贡献率最大的序列作为检验序列,记作 yi=[y1…yk]。其均值和标准差为:
4.4 SPRT
经过以上处理之后的待检序列大致符合正态分布。正常状态下,该序列满足零假设H0∶θ=θ0;故障状态下,该序列满足备择假设H1∶θ=θ1。标准差保持为σ。当两个假设都成立时,该序列的联合概密度为:

式(20)和(21)中:P0i为零假设条件下的概率密度函数;P1i为备择假设条件下的概率密度函数。
SPRT似然比为:

式(22)中:P0为零假设条件下的先验概率;P1为备择假设条件下的先验概率。
对似然比公式进一步推导简化可使得计算更加简便:
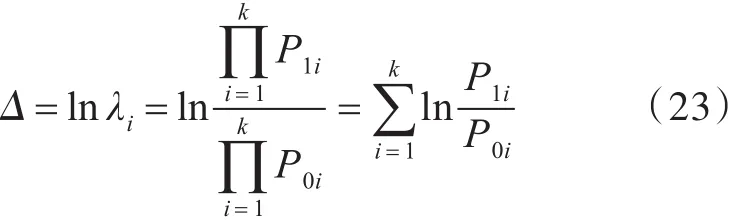
简化之后的阈值a=lnA,b=lnB。假设检验范两类错误的概率分别取α=0.001,β=0.001,则计算可得a=6.91,b=-6.91。计算出似然比值后根据检验准则进行判断。如果Δ<b,则停止检验并接受H0,即为正常状态;如果Δ>a,停止检验并接受H1,即为故障状态;如果b<Δ<a,则继续比较下一个似然比值与a、b的关系,如此循环,直至得出结果。运用此方法对齿轮裂纹进行诊断的完整流程如图3所示。

图3 齿轮裂纹诊断流程图Fig.3 Flowchart of gear crack fault diagnosis
4.5 误差分析
利用均方根误差(Root Mean Square Error,RMSE)来检验SPRT应用于此的可靠性。均方根误差计算公式如下:

5 结果与分析
5.1 小波包降噪结果
对3组不同的齿轮分别进行实验,得到图4(a)中的原始振动信号。其中S1、S2和S3分别为正常齿轮、25%和50%裂纹齿轮的振动信号。3组原始振动信号经过降噪之后,得到图4(b)中的信号。
对比图 4(a)和图 4(b)可以看到,与原始振动信号相比,降噪后信号的幅值明显有所减小,而且信号曲线也更为清晰。图4(b)基本达到了预期效果,这也表明了小波包变换能很好地对原始振动信号进行降噪。
5.2 PCA处理结果
对3组实验信号进行特征提取之后再用主元分析法处理,发现前4个主元包含超过85%的有效信息,信号S1、S2和S3的各主元贡献率排序如表2所示。由PCA的处理结果可知这3组信号的第一主元的贡献率分别达到了50.9%、50.2%、51.8%。由于排名第一的主元所占的比例最大,因此被选用来进行SPRT。

图4 实验信号:(a)原始振动信号,(b)去噪后的信号Fig.4 Experimental signals:(a)original vibration signals,(b)de-noised signals
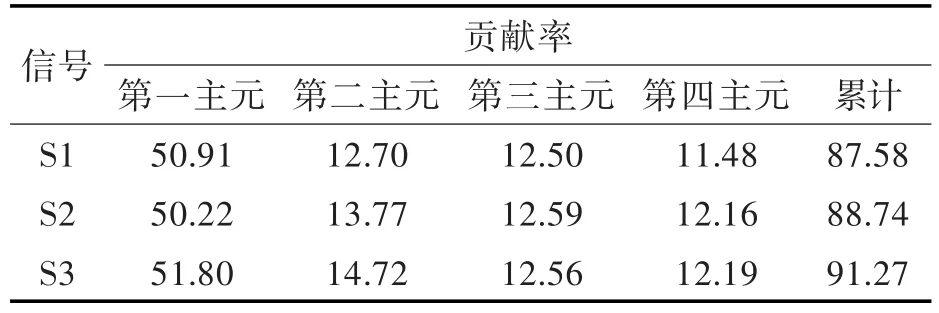
表2 主元贡献率及累计贡献率Tab.2 Principal component contribution rate and accumulative contribution rate %
5.3 SPRT结果
由似然比计算公式可知,平均值的变化对似然比影响较大。将正常信号S1的平均值记为μ0,故障信号S2和S3的平均值记为μ1。对信号进行检测,结果如图5所示。
当输入的信号是 S1和S2时,检验结果如图5(a)所示,从图中可以判定,信号S1的似然比Δ1,2(S1)<b,即齿轮箱正常工作;信号 S2的似然比Δ1,2(S2)>a,即齿轮箱出现故障。当输入的信号是S1和S3时,检验结果如图5(a)所示,从图中可以判定,信号S1的似然比Δ1,3(S1)<b,即齿轮箱正常工作;信号S3的似然比Δ1,3(S3)>a,即齿轮箱出现故障。

图5 SPRT结果:(a)似然比(Δ1,2(S1),Δ1,2(S2),Δ1,3(S1),Δ1,3(S3))与序贯检验迭代次数的关系,(b)似然比(Δ2,3(S2),Δ2,3(S3))与序贯检验迭代次数的关系Fig.5 Results of SPRT:(a)relationship between SPRT likelihood ratios(Δ1,2(S1),Δ1,2(S2),Δ1,3(S1),Δ1,3(S3))and the number of sequential testing iteration,(b)relationship between SPRT likelihood ratios(Δ2,3(S2),Δ2,3(S3))and the number of sequential testing iteration
在实验中发现不同程度裂纹的齿轮也可以通过这种方法加以区分,其方法基本相同。就本次实验而言,将两种故障信号S2和S3进行检测,检验结果如图5(b)所示,从图中可以判定,信号S2的似然比Δ2,3(S2)<b,即齿轮具有轻度损伤;信号S3的似然比Δ2,3(S3)>a,即齿轮出现重度故障。所以根据检验结果可以对25%裂纹和50%裂纹的信号进行清晰地区分。
5.4 误差结果分析
在实验中,正常状况下获取两组数据,分别进行降噪与PCA处理后共得到14 338个数据点。将这些数据分为16组,分别记为A1至A16。对16组数据分别进行序贯概率比检验,得到16个似然比值,记为B1至B16。计算这16个值之间的均方根误差,即B1分别其他15个值比较,B2分别与其他14个值比较,…,B15与B16比较,得到15组比值,选取每组比值中的最大值形成误差曲线。将故障状况下的似然比记为a,计算故障状况与正常状况之间的误差,即a与B1,B2…B16比较,将得到16个误差值形成误差曲线。通过比较误差来验证序贯概率比检验诊断齿轮裂纹故障的可靠性。
将正常信号S1的平均值记为 μ0,故障信号S2的平均值记为 μ1。将16组正常数据信号的似然比Δ1,2(S1)输入程序中,得到了 16 条 normal曲线;将2组故障信号的似然比Δ1,2(S2),Δ1,2(S3)输入程序中,得到了2条fault曲线,最后的结果如图6(a)所示。图6(a)表明16组正常曲线的趋势基本相同,而故障信号的曲线与之相比则有较大的区别。计算16组正常信号的似然比之间的均方根误差E1,2(S1),每组误差中的最大值形成的误差曲线如图6(b)所示。分别计算故障信号S1和S2与16组正常信号似然比之间的误差E1,2(S2)和E1,2(S3),得到图6(b)中的另外两条误差曲线。在误差方面,从图6(b)中可以看出不同故障之间的误差远大于同种故障之间的,这表明序贯概率比检验可以很好地区分不同故障状况。
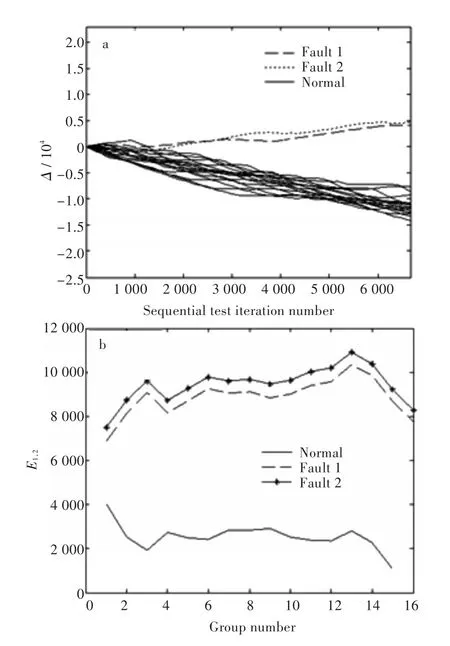
图6 SPRT及误差结果:(a)似然比(Δ1,(2S1),Δ1,(2S2),Δ1,(2S3))与序贯检验迭代次数的关系,(b)均方根误差值E1,(2S1),E1,(2S2)和E1,(2S3)Fig.6 Results of SPRT and RMSE:(a)relationship between SPRT likelihood ratios(Δ1,(2S1),Δ1,(2S2),Δ1,(2S3))and thenumber of sequential testing iteration,(b)RMSEs E1,(2S1),E1,(2S2)and E1,(2S3)
将正常信号S1的平均值记为 μ0,故障信号S3的平均值记为 μ1。将16组正常数据信号的似然比Δ1,3(S1)输入程序中,得到了 16 条 normal曲线;将两组故障信号的似然比Δ1,3(S2),Δ1,3(S3)输入程序中,得到了2条fault曲线,最后的结果如图7(a)所示。图7(a)说明16组正常曲线的趋势基本相同,而故障信号的曲线与之相比则有较大的区别。计算16组正常信号的似然比之间的均方根误差E1,3(S1),每组误差中的最大值形成的误差曲线如图7(b)所示。分别计算故障信号S1和S2与16组正常信号似然比之间的误差E1,2(S2)和E1,3(S3),得到图7(b)中的另外2条误差曲线。在误差方面,从图7(b)中可以看出不同故障之间的误差远大于同种故障之间的,这表明SPRT可以很好地区分不同故障状况。
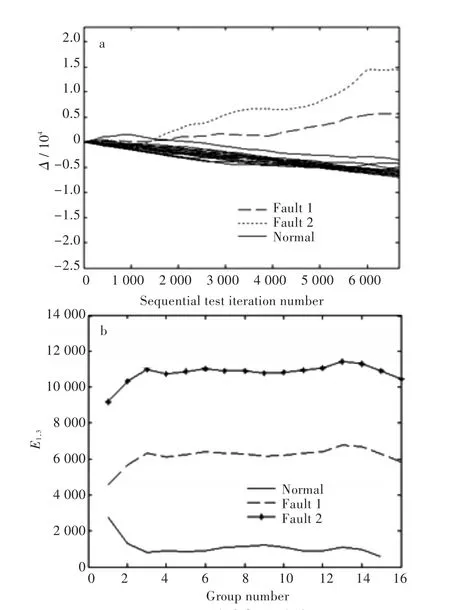
图7 SPRT及均方根误差结果:(a)似然比(Δ1,(3S1),Δ1,(3S2),Δ1,(3S3))与序贯检验迭代次数的关系,(b)均方根误差值E1,(3S1),E1,(3S2)和E1,(3S3)Fig.7 Results of SPRT and RMSE:(a)relationship between SPRT likelihood ratios(Δ1,(3S1),Δ1,(3S2),Δ1,(3S3))and thenumber of sequential testing iteration;(b)RMSEs E1,(3S1),E1,(3S2)and E1,(3S3)
由图6和图7可知,当以正常信号的平均值为参数μ0时,不论是以哪种故障信号的平均值为参数 μ1来建立模型,从最后的结果中都能对3种状况进行清晰地区分。
6 结 语
本文提出了一种将PCA与SPRT相结合的检测方法,并选取不同程度裂纹的故障齿轮与正常齿轮进行模拟试验,来检测此方法能否有效区分不同状态下的齿轮。在预处理之后利用PCA对实验信号所选取的特征参数进行降维处理,有效地减少了特征数量,使得之后的检验更加高效准确,最终有效地识别出了齿轮箱不同的状态。此外,经过多次实验后证明在其他的工作条件下,该方法也能对齿轮箱不同的状态进行清晰地区分。因此将该方法应用于齿轮裂纹故障检测与分类方面是有效而且可靠的。此方法也可供其他旋转机械的诊断研究进行参考。
