一种羽毛球挥拍运动分析装置
2019-01-02金立左李久贤
陈 佩,金立左,李久贤
(东南大学自动化学院,江苏 南京 210096)
近年来,随着运动健康的理念深入人心,以智能手环为代表的可穿戴电子设备得到普及[1],市场前景可观。目前智能手环对人体状态的识别主要针对如走路、跑步和睡眠等的识别,市面上缺少诸如对打羽毛球等器械运动状态识别的穿戴设备。为了满足羽毛球爱好者对运动过程中挥拍状态识别、记录的要求,本文设计了一种可穿戴的运动分析装置来辅助实现挥拍状态的检测分析,并将分析结果传递给运动者,不仅可以让运动者知晓自己的挥拍状态,还能帮助其改善自身球技。
当前,运动分析主要有两种方法,一是基于惯性传感器的运动识别[2],该方法主要依赖于对传感器数据的处理;另一种是基于视频分析的运动识别[3],该方法依赖于对视频图像的处理。由于视频分析方法的成本较高,本文采用惯性传感器的方法。基于MPU6050[4]传感器设计了单片机数据处理系统,选用高性能跨界处理器NXP RT1050[5]作为核心处理器进行数据采集和算法处理,选用串口蓝牙透传模块进行数据传输。通过采集用户运动时的传感器数据,经过预处理后进行特征计算与提取,最后通过SVM(support vector machine,支持向量机)分类器[6]进行击球动作分类,并实时将这些数据通过蓝牙上传至APP供用户查看。本装置具有硬件成本低、体积小和功耗低等特点,可以嵌入到羽毛球拍手柄底部,实现挥拍运动分析的功能。
1 系统设计
1.1 需求分析
根据击打羽毛球常见的击球挥拍方式,本文羽毛球挥拍运动分析装置的基本功能需求如下:支持高球、推球、挑球和杀球4种正反手共8种击球方式[7]的分类识别;支持每种击球挥拍方式的数量统计;支持单种击球挥拍方式每次击球力度(速度)的记录;除此之外,在尺寸和功耗等方面也应满足一定要求。
1.2 方案设计
系统总体方案包含两个方面,一是以设备为核心的挥拍运动分析装置,二是以上位机为核心的终端APP。由于终端上位机只负责接收数据与显示,故不作详细说明。挥拍运动分析装置是本文的核心,其系统结构框图如图1所示,它是以NXP RT1050为核心的单片机传感器信息处理系统,系统传感器为MPU6050六轴传感器,可以实时提供运动分析装置3个方向的加速度和角速度信息,此外装置还搭载RGB-LED用于显示装置的工作状态。装置工作时置于球拍手柄底部,通过蓝牙和终端连接,连接状态可通过LED颜色判断,绿色代表连接成功。
1.3 硬件设计
系统硬件主要包括以下模块。
1)最小系统:最小系统包括RT1050单片机、电源、晶振和调试接口等,负责传感器数据的采集、处理和识别。
2)传感器模块:选用MEMS数字传感器MPU6050,它由三轴加速度计、三轴陀螺仪和1个DMP单元组成,通过IIC接口将数据传输到单片机。
3)无线蓝牙模块:选用串口转蓝牙透模块,单片机通过UART串口与之相连,设置波特率为115 200bit/s与模块通信。
4)RGB-LED模块:设置RGB-LED灯主要是为了显示装置的工作状态,包括充电状态、连接状态和运动状态等。
5)电源模块:选用线性充电IC TP5410实现锂电池充放电管理的功能,通过线性稳压IC输出多路稳压电源,保证了系统稳定性和低功耗。

图1 系统框图
2 算法设计
挥拍运动分析算法部分主要由数据采集、数据预处理、动作捕捉、特征提取和分类识别5个部分组成。算法流程如图2所示。
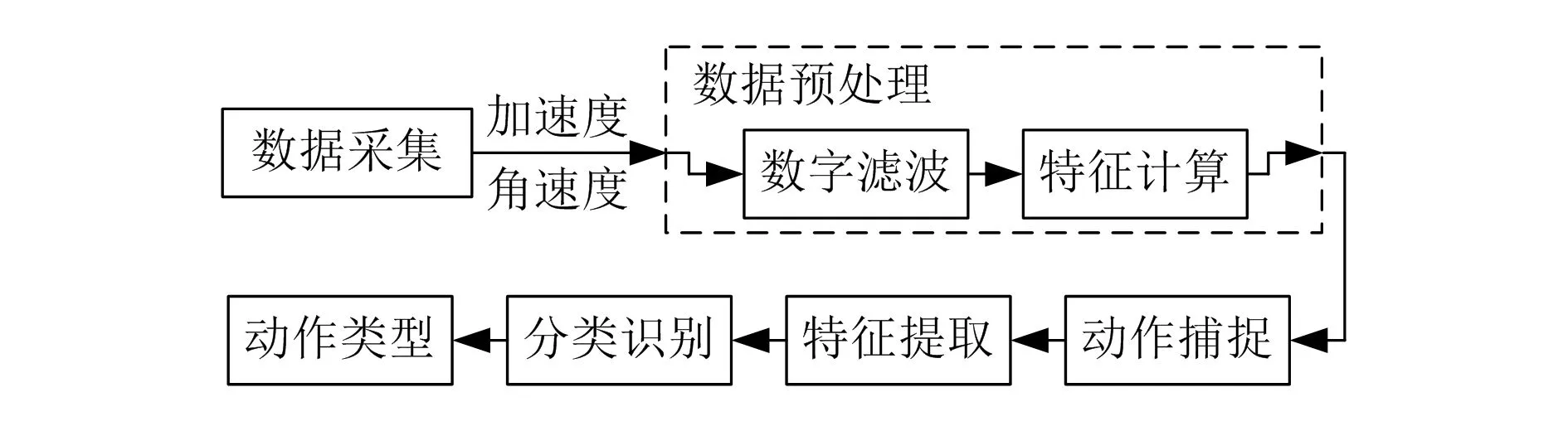
图2 算法流程图
2.1 数据采集
数据采集,即RT1050单片机通过IIC接口与MPU6050数字传感器相连,采集三轴的加速度、角速度数据,其采样速率最高可达400kbit/s。
2.2 数据预处理
数据预处理包括数字滤波[8]和特征计算[9]两个部分。数字滤波用于去除原始数据中的高频噪声,特征计算用于对原始数据进行初步特征提取,以便于排除持拍时的方向差异和进行动作捕捉。
2.2.1数字滤波
羽毛球运动的加速度、角速度信号主要为低频信号。由于信号在传输的过程中会受到噪声的影响,同时球拍的抖动也会引入干扰噪声,所以必须对采集到的原始信号进行滤波以去除高频噪声的干扰。本文设计了低通IIR数字滤波器进行滤波。
2.2.2特征计算
在实际运动中为排除持拍时不同方向的干扰,本文采用计算合加速度信号和合角速度的方法。考虑到挥拍瞬间会产生较大的加速度,故本文采用计算加速度信号方差的方法以捕捉不同的动作[10]。本文将原始信号的合加速度、合角速度和加速度方差作为特征值,构建特征向量。
记t时刻采集到的三轴加速度信号为axt,ayt,azt,三轴角速度为ωxt,ωyt,ωzt。分别计算t时刻的合加速度At、加速度方差Dt、合角速度Wt,计算公式如下:
(1)
(2)
Dt=(|axt|-At)2+(|ayt|-At)2+(|azt|-At)2
(3)
2.3 动作捕捉
羽毛球运动整个过程是连续的,期间可能产生多种类型的动作,因此动作识别需要提取有效动作区间的数据进行分析。在运动过程中挥拍时的加速度和角速度相对于正常握拍时会有较大的变化,本文基于此通过设置静态门限阈值捕捉有效挥拍动作窗口。
设Dt±m为t时刻前后m个采样时间点的合加速度方差,U为静态门限阈值,将Dt与Dt±m进行比较,若满足:
Dt-Dt±m≥U
(4)
则t时刻的采样点可判断为挥拍中心数据点,之后再合并可能检测到的相邻的中心数据点,即可捕捉包含有效运动信息的数据段,相关示意如图3所示,图中虚线为捕捉到的挥拍动作窗口,表示单次挥拍动作的有效数据段。
静态门限阈值可根据不同用户动作幅度的大小设置不同阈值,也即第一次使用装置时可以先进行参数校准;由于羽毛球挥拍时间段一般在1s左右,本文装置的采样频率为10Hz,故m可以取5~15。
2.4 特征提取
当捕捉到单次挥拍动作的有效数据段后,只需要合并每一段的合加速度、合角速度和加速度方差构建特征向量即可。假设得到的合加速度特征向量为CA,合角速度特征向量为CW,加速度方差特征向量为CD,则最终提取的特征向量为C,共6m+3维。

图3 动作捕捉窗口示意图
CA=[At-m,…,At0,…,At+m]
CW=[Wt-m,…,Wt0,…,Wt+m]
CD=[Dt-m,…,Dt0,…,Dt+m]
(5)
C=[At-m,…,At0,…,At+m,Wt-m,…,Wt0,…,Wt+m,Dt-m,…,Dt0,…,Dt+m]
(6)
2.5 分类识别
特征值提取完成后即可将数据传入事先训练好的SVM分类器[11-12]进行分类识别,因此该分类器的性能决定了整个分类过程的准确性,本文在具体实现时移植了LibSVM库,并采用了RBF(radial basis function)核函数[13]。分类的训练与使用流程如图4所示。

图4 SVM分类器的训练与使用流程
2.5.1数据集制作
制作时需要专业羽毛球运动员使用带有挥拍运动分析装置的球拍示范各种击球方式的标准动作,采集大量有效数据,之后根据对应的击球类型标定该数据,完成数据集的制作。
2.5.2模型训练
模型训练时,把采集得到的训练数据按照算法流程进行处理获得对应的特征向量和人工标记结果,将特征向量和标记放入SVM模型得到训练模型。
2.5.3交叉验证
本文采用6折交叉验证[14]的方法验证SVM分类器。具体操作时,按照以上数据集制作方法制作了6份不同羽毛球运动员的训练数据集,依次选择其中一份作为测试数据,剩下5份作为训练数据。每次都是首先用训练数据训练SVM分类器,然后用该分类器分析测试数据的击球类型,以达到提升分类器稳定性的目的。用该方法建立的SVM分类器,由于训练数据来自于广泛的实验人群,可以建立一个普适化运动识别模型,因此适合大众人群的羽毛球运动分析。
3 结束语
本文设计了一款低功耗的用于羽毛球运动的运动分析装置,可以自动捕捉用户挥拍的有效动作区间并识别分析出具体的挥拍动作类型,对于提高羽毛球运动爱好者的运动体验有一定意义。同时,本文设计的运动分析装置还可以推广到网球、乒乓球等其他球类运动,具有普适性和推广价值。
