一种自动爬楼运输车
2018-12-29王宇李胜陈文仁朱满郝伟王玉琳董玉革
王宇, 李胜, 陈文仁, 朱满, 郝伟, 王玉琳, 董玉革
(合肥工业大学机械工程学院,合肥 230009)
一种自动爬楼运输车
王宇, 李胜, 陈文仁, 朱满, 郝伟, 王玉琳, 董玉革
(合肥工业大学机械工程学院,合肥 230009)
设计了一种自动爬楼运输车,其特征是将水平行走运动与升降运动分开,水平行走由伺服电动机通过滚珠丝杠带动载物台实现,升降运动由电动推杆的伸缩实现,行走运动与升降运动交替进行。其中,水平行走与升降运动均由3条腿支撑完成,利用三角形的稳定性保持整个机构在水平面内稳定牢固。在爬楼过程中,载物台始终呈水平状态,运送的物品不会因倾斜而滑落。整个装置由单片机控制伺服电动机与电动推杆协调运动,从而完成爬楼动作。
爬楼;机器人;运输车;自动化
0 引言
在电梯空间不足或无电梯的楼层里,依靠人力搬运货物上下楼十分辛苦,而且人工搬运物品的大小及重量均有限,易受体力限制,成本高、效率低。对此情况,应用机械设备代替人力会达到高效、省力的效果。爬楼车就是用于搬运重型、大件物品上下楼梯的简易机械装置[1-4]。现有文献公开的爬楼设备多为三轮滚动式爬楼车[5],该类产品的3个滚轮绕着一根主轴均布,靠主轴的转动驱动3个滚轮依次与楼梯的上下两个台阶面接触,加上人力牵拉,实现爬楼的动作[6-9]。虽然它一定程度上解决了人力搬运重量方面的限制,但仍然存在以下缺点:1)装置工作时仍需人力的辅助,未能完全解放双手;2)爬楼时装置与台面的接触点只有2个,稳定性差,具有一定的危险性;3)为了适应爬楼,该类产品的载物台全为倾斜放置,对所载物品的类型有一定限制[10-15]。
为了弥补现有技术的不足,本文设计了一种自动爬楼运输车,可以实现大件物品的自动搬运,确保物品安全稳定载送。
1 自动爬楼运输车的结构组成
图1为自动爬楼运输车的整体结构。整车由载物台、进给机构、升降机构、平地支承机构以及控制系统5个部分组成:1)载物台。承载运输的货物。2)进给机构。完成爬楼车的水平进给,包括2根滚珠丝杠15、16与3根电动推杆5、7、9。2根滚珠丝杠的两端分别通过吊耳固定在载物台两侧的下方,其中一端联接伺服电动机。滚珠丝杠15具有两个螺母,分别固结电动推杆5和7,当伺服电动机13控制滚珠丝杠15转动时,电动推杆5和7在载物台下方的滑道内同步移动。滚珠丝杠16只有一个螺母,其上固结电动推杆9,当伺服电动机14控制滚珠丝杠16转动时,电动推杆9在载物台下方的滑道内移动。3)升降机构。由6根电动推杆5、6、7、8、9、10组成,这6根推杆可以根据需要自动进行伸缩组合,从而完成爬楼车的垂直升降运动。4)平地支承机构。由前后4条轮腿1、2、3、4构成。5)控制系统。基于AT89S52单片机,内部含有伺服电动机驱动器以及电动推杆驱动器,运输车的爬楼动作是在单片机的控制下协调进行的。
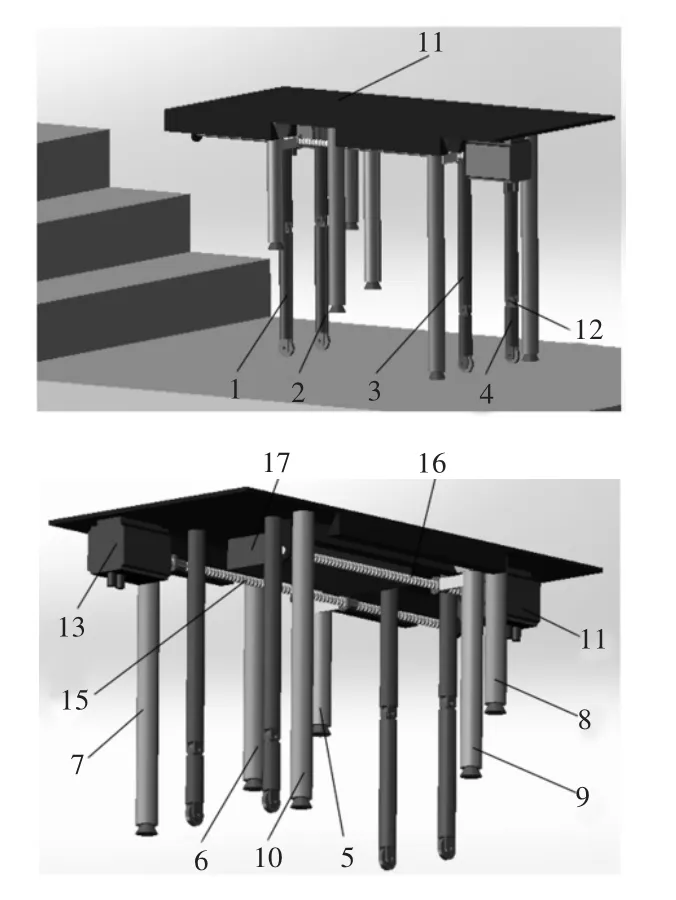
图1 自动爬楼运输车的整体结构
2 自动爬楼运输车的工作原理
2.1 平地行驶阶段
如图2所示,爬楼车在平地行驶时,由前后4条轮腿1、2、3、4支撑车身,4条轮腿的长度略大于后端两根电动推杆7、10完全收缩时的长度。4条轮腿下方均装有万向滚轮,保证车身能够360°旋转,实现掉头转弯等动作。此阶段可由人力推行。

图2 平地行驶阶段
2.2 由平地向楼梯过渡阶段
爬楼车由人工推行至楼梯前,开始由平地向楼梯过渡,可分为两个阶段:
1)如图3(a)所示。伺服电动机13正转,滚珠丝杠15转动,其上2只螺母分别带动电动推杆5、7同步前进;当电动推杆5到达楼梯第一级踏面的中间时,伺服电动机13停止,电动推杆5伸长直至抵上楼梯第一级踏面,作为下一时刻的支承腿。之后,伺服电动机13反转,电动推杆5、7相对车身向后移动,因电动推杆5伸出的脚已经抵在楼梯踏面,所以拖动车身向前移动;同时,电动推杆5、8之间两条轮腿上面的关节电动机动作,两条前轮腿向后弯曲收起,为下一步的爬楼作准备。
2)如图3(b)所示。电动推杆8伸长至楼梯第一级踏面,作为下一时刻的支承腿,电动推杆5收缩至最短;伺服电动机13正转,电动推杆5进给至第二级踏面中间位置并伸长抵紧踏面,电动推杆8收缩(此时有电动推杆5作为支承);伺服电动机13反转,拖动车身向前移动。此时,爬楼车3组腿分别落在3个平面上,长度与楼梯互补,载物台保持水平。至此,由平地向楼梯过渡阶段结束。
2.3 爬楼梯阶段
如图4所示,从平面向楼梯过渡阶段完成后,根据楼梯的台阶数,循环以下过程:
1)电动推杆6、8、10同时伸长略大于一个台阶的高度,载物台被顶起,此时爬楼车由电动推杆6、8、10支承,3根推杆呈三角形分布,爬楼车不会失稳。

图3 由平地向楼梯过渡阶段
2)2条后轮腿向前弯曲收起,正向同时启动2台伺服电动机,使得电动推杆5、7、9同步向前进给,直至3根电动推杆分别到达3个台阶的中间位置。
3)电动推杆6、8、10同时收缩至最短,此时爬楼车由电动推杆5、7、9支承,3根推杆也呈三角形分布,保证了爬楼车的稳定性。
4)反向同时启动2台伺服电动机,使得车身向前运动。至此,爬楼车成功爬升一级台阶。
循环上述爬楼过程直至最后一阶楼梯,即可完成爬楼梯阶段。
2.4 由楼梯向平地过渡阶段
当爬楼车爬升至图5(a)所示位置时,开始由楼梯向平地过渡。此阶段可以分解为以下几个过程:
1)电动推杆6、8、10同时伸长略大于一个台阶的高度,正向启动2台伺服电动机,电动推杆5、7、9前进,电动推杆7、9运动至上一个台阶表面,此时电动推杆5距平地尚有一个台阶的高度。
2)电动推杆5伸长至地面,作为下一时刻的支承点。
3)电动推杆6、10收缩至最短,反向启动2台伺服电动机,车身前进,电动推杆6、10运动至上一个台阶表面,此时,电动推杆8距地面尚有一个台阶的高度,如图5(b)所示。
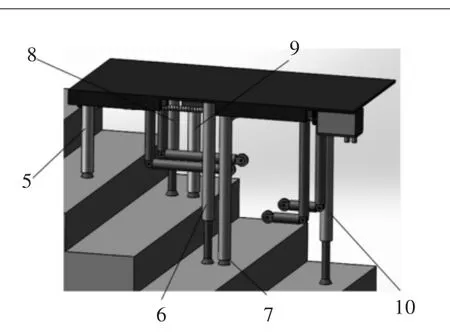
图4 爬楼梯阶段
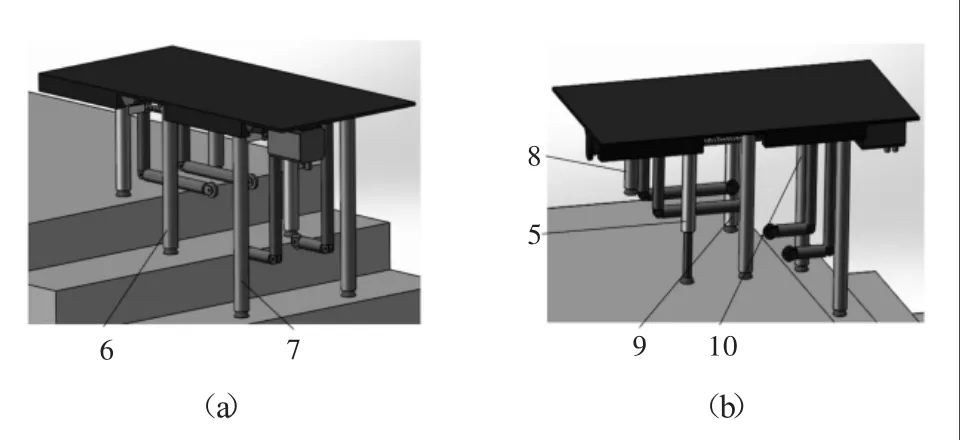
图5 由楼梯向平地过渡阶段
4)电动推杆8伸长至地面,作为下一时刻的支承点。
5)电动推杆6、8、10同时伸长略大于一个台阶的高度,两伺服电动机同时正转,电动机14转速降为先前一半(使得电动推杆9进给距离缩短,三支承点分布适宜,加强稳定性),拖动电动推杆5、7、9前进,电动推杆7、9运动至上一个台阶表面,此时,电动推杆5距地面尚有一个台阶高度。
6)电动推杆5、9同时伸长至地面,关节电动机动作,2条前轮腿放下。
7)电动推杆6、8、10同时收缩至最短,关节电动机动作,2条后轮腿放下。
8)两电动机同时反转,拖动车身向前进给,电动推杆5、9收缩至最短,车身由4个轮腿支承,电动机14半速正转,使得电动推杆9回到初始位置。
此时,爬楼车完成从楼梯向平地的过渡,在平地上可由人力推行前进。
3 结语
本文所设计的自动爬楼运输车,在平地行驶时依靠4条轮腿着地,运行平稳;在平地向楼梯过渡、攀爬楼梯以及由楼梯向平地过渡阶段,均有至少3条腿着地,所以爬楼过程稳定、可靠。采用3条腿上下运动和3条腿前后运动,模仿动物爬楼,将水平进给运动和垂直升降运动分离开来,使得载物台始终处于水平状态,实现了物品的安全、平稳传送。
[1] 张军林.对机械传动中的惯性力分析与计算的探讨[J].机械工程师,2012(9):76-77.
[2] 徐进.丝杆升降机构传动的可靠性设计研究[J].煤矿机械,2003(10):15-18.
[3] 宋现春,艾兴.伺服电机智能控制接口电路设计[J].机械工程师,2002(1):58-59.
[4] 苏萌.电器附件测试台运动系统的实现与分析[J].电子产品可靠性与环境试验2013(5):40-43.
[5] 祝欣波,江征风.伺服电机伺服系统设计[J].机械工程师,2007(11):88-90.
[6] 王虎,彭如恕,尹泉.基于STM32嵌入式模糊PID伺服电机控制系统的设计[J].机械工程师,2014(11):139-141.
[7] 徐明字,赵勇,包士维,等.电动载物爬楼机的开发设计[J].机械工程师,2015(7):198.
[8] 王佳佳,唐雪梅,何小龙.四连杆爬楼梯机器人的改进和优化[J].机械工程师,2014(7):150-152.
[9] 陆江艳.关于无障碍设计标准实施的调研及启示[J].包装工程,2010(10):65-69.
[10]吴宗泽.机械结构设计准则与实例[M].北京:机械工业出版社,2006.
[11] 王泽娟.产品的人性化设计[J].科技信息(学术研究),2007(31):47.
[12]李冠群,宋其江,杨焱强.一种新型电动自平衡爬楼车的设计与研究[J].自动化技术与应用,2016(7):44-48.
[13] 王玉烁,陈光军,徐锐,等.阿基米德螺线轮楼梯搬运机的设计[J].佳木斯大学学报(自然科学版),2014(3):405-407.
[14]祝汉营,王志坤.多功能拉椅车的设计与实现[J].硅谷,2015(1):42-43.
[15] 刘柄辰,宋其江,凌志成,等.一种新型全控式自平衡爬楼车的设计与研究[J].机电产品开发与创新,2015(4):34-36.
A Kind of Automatic Transport Vehicle for Climbing Stairs
WANG Yu,LI Sheng,CHEN Wenren,ZHU Man,HAO Wei,WANG Yulin,DONG Yuge
(School ofMechanical Engineering,Hefei UniversityofTechnology,Hefei 230009,China)
This paper designs a kind of automatic transport vehicle for climbing stairs which can separate the horizontal walking motion from the lifting movement.The horizontal walking is driven by the servo motors through the ball screws,the lifting movement is realized by the electric push rods,the walking motion and the ascending/descending motion can be alternated.And the horizontal walking and lifting movements are all supported by three legs,the stability of the whole vehicle in the horizontal plane is maintained by the stability of the triangle.In the process of climbing stairs,the platform is always in a horizontal state and the goods will not be transported due to tilt and slide.The whole device is monitored by a single chip microcomputer to control the servo motors and the electric push rods to coordinate the movements,and thus the climbing action is completed.
climbing stairs;robot;transport vehicle;automation
TP 271.4
A
1002-2333(2018)01-0120-03
基金支持:合肥工业大学2016年校级大学生创新创业训练计划项目(2016CXCY015)
(编辑 昊 天)
王宇(1995—),男,本科生,机械设计制造及其自动化专业;
王玉琳(1966—),男,副教授,工学博士,硕士生导师,主要从事数控技术与机电传动控制技术的研究。
王玉琳,KL32T@vip.sina.com。
2017-04-08
