基于单片机的桌面型并联机器人的设计
2018-12-29卢桂萍郑文铎陈增霖
卢桂萍, 郑文铎, 陈增霖
(北京理工大学珠海学院工业自动化学院,广东 珠海 519088)
基于单片机的桌面型并联机器人的设计
卢桂萍, 郑文铎, 陈增霖
(北京理工大学珠海学院工业自动化学院,广东 珠海 519088)
传统的并联机器人采用PLC等工业控制器控制,体积相对较大,成本高。文中设计将使用STM32单片机取代PLC作为整个并联机器人系统的控制核心,并和C#编写的电脑上位机软件通讯,步进电动机作为动力,实现并联机器人的示教与再现等功能。
并联机器人;桌面型;单片机;上位机;步进电动机
0 引言
近几年来,全球范围内工业机器人的速度增长超过10%,仅2012年全球的工业机器人的总装机量就超过了120万台,其中我国装机量接近10万台,仅占全球装机总量的8%。而从机器人的使用密度来看,2014年,全球工业机器人使用密度最高的国家是韩国,每一万名工人拥有的机器人数量达到347台,日本以339台/万人仅次于韩国,德国以251台/万人排第三,而我国只有21台/万人,这样的水平甚至不到国际水平55台/万人的1/2。目前看来,我国制造业的自动化程度相对较低,仍有很大的发展空间。另外,我国的工业机器人市场多为国外占据,如ABB、发那科、库卡和安川四大家占据了我国工业机器人市场的85%,而中国的工业机器人制造公司起步较晚,市场份额小,规模也小,一直被外国企业压制。技术上,工业机器人的核心技术及关键部件的制造技术一直被国外垄断,像伺服电动机及伺服驱动器,还有RV减速器等关键零部件国内无法生产,长期依赖进口,所以我们要加快工业机器人的研究,以推进中国工业的自动化生产及智能制造的发展[1]。
如果本设计能实现量产,将有以下意义:1)降低机器人成本;2)减小并联机器人整体系统的体积;3)促进高校的工业机器人类课程的教学改革。
1 控制系统设计
1.1 需要解决的问题
STM32单片机作为控制核心是本设计最为重要的部分。如何让STM32输出指定频率的PWM,灵活控制通用输入输出IO的状态和如何利用定时器计算STM32输出的脉冲数,是整个作品能否完成的关键。
机器人的机械结构设计。尺寸和公差,粗糙度的选择和计算,减速比的计算,同步带的选择和各种零部件的材料选择。
电路的设计。包括控制模块,驱动模块,传感检测模块。
上位机的程序和算法设计。如何运用C#编写上位机,机器人控制平台所需要的功能,要显示的数据,界面的设计。
串口通讯技术。本设计中电脑上位机和STM32之间传递的数据虽然不多,但是上位机和单片机之间的数据交互传输非常频繁,几乎每一步的操作都需要两者的通讯来确认,所以需要安排好数据发送和接收的时间,按照其重要性分配优先级。还有上位机和单片机通过串口每次只能发送一个8位的数据,要保持信息的准确性需要编写数据的转换算法,同时也要提高传输的实时性。
1.2 总体方案
本设计将系统的工作模式分为示教模式和再现运行模式,具体的实现方案如下。
1.2.1 示教模式
示教模式是用户通过直接操作机器人控制平台来手动调整机器人的末端位置,并记录下机器人当前的坐标,最终形成一段记录机器人再现运行的轨迹的程序。在示教模式下,用户先点击机器人控制平台上方向控制界面的虚拟按键,包括有X+、X-、Y+、Y-、Z+、Z-六个按键分别代表着机器人末端向X、Y、Z三个坐标轴的正反方向移动,当移动机器人末端向某个方向移动,到达目标位置在该方向上的坐标值时,按下获取示教点按钮,获取机器人末端的位置坐标,然后再控制机器人在其他方向上的移动,依次记录直到机器人末端到达目标位置。
1.2.2 再现运行模式
再现运行是要求机器人系统在已有程序的情况下,让机器人末端根据程序里记录的点位,一步步运行,形成一段轨迹。在示教完成后,点击示教按键,示教按键的内容由“示教”切换为“再现运行”,此时机器人控制平台会弹出一个提示框,提示“是否再现运行”,此时点击“确定”,则系统开始执行程序,机器人末端开始沿着记录的点位运行。如果点击“取消”,则不进行再现运行。

图1 控制系统图
从图1可以看到,在本设计系统中,用户通过上位机界面输入,直接操作机器人控制平台,上位机会记录并储存操作的一些数据,同时跟STM32之间进行串口通讯,交换数据,STM32根据上位机传递来的数据进行计算并输出相应的信号给驱动系统,从而使机器人末端根据要求运动。
2 控制核心的选择
2.1 对控制核心的要求
根据整个设计的要求,主控芯片要能和电脑之间进行通讯,所以要求主控芯片有串口的发送和接收功能。还有要求主控芯片能输出3路符合要求的PWM,并且能够进行计时来计算输出的脉冲量,这就要求芯片有足够多的定时器。并且要有一定数量的通用IO来满足传感器,驱动器的使用及一些其他需求。另外,并联机器人的算法比较复杂,程序量大,实时性高,所以要求芯片具有较高的运算速度。
2.2 单片机选型
市面上普遍采用的并联机器人主控造价都比较昂贵,而且开发的难度相对较大。本设计采用STM32F103ZET6作为整个系统的主控芯片,该芯片是基于ARM Cortex-M3核心的32位微控制器,LQFP-144封装,具有丰富的外设[2]。
2.3 机器人控制平台设计
本设计的并联机器人控制平台将在个人电脑上完成,采用了C#编程语言,C#是由微软公司发布的一种面向对象的设计语言。C#作为一种现代的、通用的编程语言,其容易学习、结构化和高效率使其成为一种广泛应用的语言[3]。
根据本设计的要求,控制平台要有以下功能:1)STM32单片机与电脑通讯设置;2)并联机器人的运动控制;3)示教与再现运行的设置;4)相关参数的显示。
所以,本设计的并联机器人的控制平台分为4个模块,分别是串口设置、方向控制、示教与再现窗口和数据显示[4]。最终设计的控制平台界面如图2所示。

图2 并联机器人控制平台界面
3 机械结构设计
3.1 机械结构设计整体要求
机械结构作为并联机器人的硬件,对机器人的运动精度有着至关重要的影响,所以对机器人的机械结构有以下的基本要求:
1)基于本设计的定位,首先必须满足运动精度、运动范围、经济性等要求[5];2)满足机器人运动精度对机械结构的刚性、变形量的要求;3)在经济性许可的前提下应该尽可能缩短传动链,简化传动结构,提高传动的精度和效率;4)出于经济性的考虑,部分部件将采用手动加工,所以应该将个人手动加工的能力范围考虑到部分结构的设计和选型中;5)应方便加工和装配,对于加工的误差应该有机构或者措施进行调整补偿,使得可以降低零部件的加工精度要求;6)结构简单,可靠合理,符合加工的可行性。
3.2 机械结构整体布局
本设计的并联机器人一共3个自由度,根据并联机器人的结构要求,每个自由度控制的机械臂互成120°,由步进电动机作为动力来源,步进电动机通过减速装置和主机械臂相连,主机械臂再和副机械臂相连,最后副机械臂的另一端通过抓具中心连接,形成整个机器人运动部分的机械本体,如图3所示。步进电动机和减速机构直接固定在基板上,考虑到机械零部件加工的精度,基板和步进电动机等零件的装配必须位置可调[6]。

图3 并联机器人工作范围

图4 传动系统
3.3 传动系统设计
考虑到成本与体积问题,还有机器人使用的负载不会太大,所以使用的步进电动机力矩和传动系统减速比不要求太大。同步带传动具有传动比准确、对轴作用力小、结构紧凑等优点,但是减速比没办法像减速箱一样大,且体积较大,占空间,考虑到并联机器人的主要搬运对象是重量较轻的物体,所以选用同步带减速是可行的[7]。所以本设计选用同步带进行减速,考虑到带轮的直径,选用减速比为1:4,主动轮齿数为10,从动轮齿数40,如图4所示。
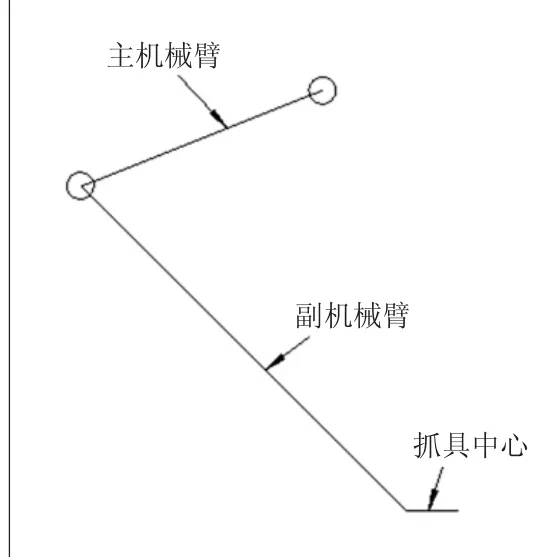
图5 机械臂结构简图
3.4 机械臂设计
并联机器人的机械臂分为主机械臂和副机械臂,如图5所示,主副机械臂一共3对,一个主机械臂和一个副机械臂相连,最后每个副机械臂的另一端通过抓具中心相连[8]。
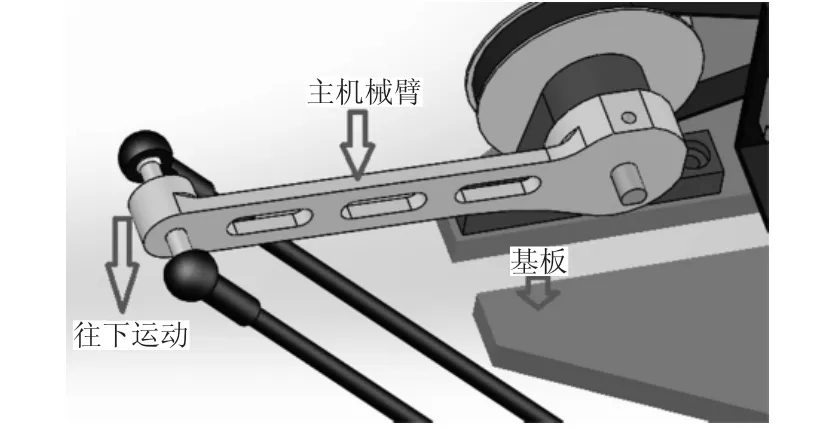
图6 主机械臂往下运动
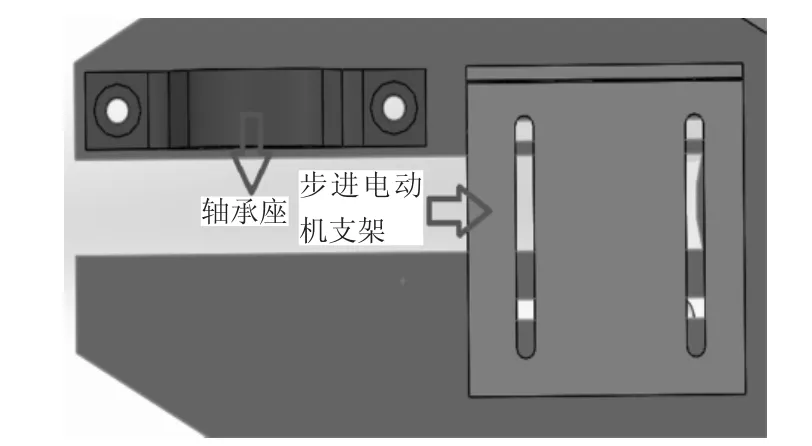
图7 轴承座和步进电动机支架相对位置
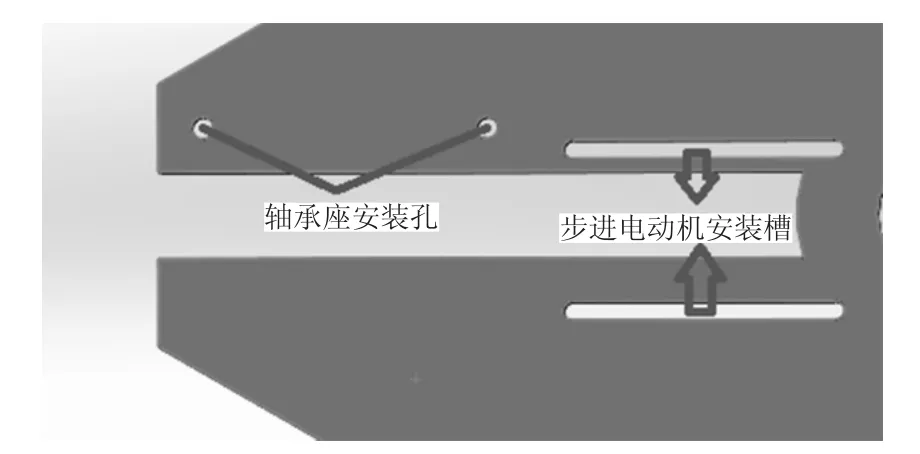
图8 轴承座和步进电动机安装孔设计

图9 机器人机械结构装配图
3.5 基板设计
基板是并联机器人的主要结构,要承受整个机器人本体大部分结构的重量,在本设计中,包括整个传动系统,步进电动机都是安装在基板上,所以基板的设计合理性尤为重要。
我们的并联机器人指的是Delta机器人,从字面上理解就可知道这种机器人的外观呈三角形,所以基板的外观也是三角形,使整个作品更加美观。因为传动系统安装在基板上,所以主机械臂也在基板上方,但是由于主机械臂将跟着带轮轴旋转,基板将阻碍到主机械臂往下方转动,所以,基板上应该开一个槽,使得主机械臂能顺利通过基板。如图6所示。
另外,本设计使用同步带作为减速机构,同步带在使用一定时间后会出现松弛现象,且由于制造精度的问题,每个同步带实际周长都不一定等于设计周长,所以,同步带的张紧就要依靠调节主从动轮之间的中心距来实现,所以就要求轴承座和步进电动机支架之间的距离可调[9-15],如图8所示。由于轴承座的位置将决定主机械臂的位置,且每个主机械臂之间互成120°,所以,轴承座的位置应该确定下来,通过调整步进电动机支架的位置来调整二者之间的中心距。如图8所示,在基板上安装步进电动机支架的地方铣出两道比电动机支架安装螺栓略大的槽,支架在基板上可以左右运动,从而达到调整中心距的目的。
最后设计完成的机器人整体结构如图9所示,其中机器人的支架隐藏处理。
4 结 论
本设计验证了利用单片机作为控制核心实现并联机器人基本功能的可能性,可作为继续研究并完善桌面型并联机器人的基础,本设计中的并联机器人一些功能还有待改进及完善。本设计中使用的主控芯片STM32单片机的性能及配置只能满足目前相对简单的机器人功能使用,在后续的研究设计中,需要更换性能更高的主控芯片,并且需要引入操作系统方能满足设计要求。
[1] 赵杰.我国工业机器人发展现状与面临的挑战[J].航空制造技术,2012(12):26-29.
[2] 刘火良,杨森.Stm32库开发实战指南[M].北京:机械工业出版社,2013.
[3] PERKINS B,HAMMER J V,REID J D.C#入门经典[M].7版.黄俊伟,译.北京:清华大学出版社,2016.
[4] 梅莱.并联机器人[M].北京:机械工业出版社,2014.
[5] 郭胜,曲海波.冗余并联机器人构型综合与应用[M].北京:科学出版社,2016.
[6] 徐兵.机械装配技术[M].2版.北京:中国轻工业出版社,2014.
[7] 薛承基.电动机传动系统控制[M].北京:机械工业出版社,2013.
[8] 刘善增.少自由度并联机器人机构动力学[M].北京:科学出版社有限责任公司,2016.
[9] 何一文.机电一体化系统设计与应用[M].北京:中国水利水电出版社,2015.
[10] 祝琨,杨唐文,阮秋琦,等.基于双目视觉的运动物体实时跟踪与测距[J].机器人,2009,31(4):327-334.
[11] 秦志强.C51单片机应用与C语言程序设计[M].北京:电子工业出版社,2007.
[12] 陈落根,罗振军,李玉航,等.基于SAMCEF的四自由度并联机器人动力学建模与仿真[J].机械设计与研究,2013(6):796-800.
[13]程世利.并联机构若干基本问题研究[D].南京:南京航空航天大学,2010.
[14]黄真,赵铁石,李秦川.空间少自由度并联机器人机构的基础综合理论[C]//第一届国家机械工程学术会议.2000.
[15]徐鑫.数控进给伺服系统与驱动电动机的发展及趋势[J].装备制造技术,2011(6):121-123.
Design of Desktop Parallel Robot Based on Single-chip Computer
LU Guiping,ZHENG Wenduo,CHEN Zenglin
(School ofIndustrial Automation,BeijingInstitute ofTechnology(Zhuhai),Zhuhai 519088,China)
The traditional parallel robot is controlled by PLC and other industrial controller,which has the disadvantages of relatively large volume and high cost.This paper designs a parallel robot which uses STM32 MCU to replace PLC as control core,which communicates with PC software written by C#software.Step motor is used as driver to realize functions of the parallel robot teaching and representation.
parallel robot;desktop;single chip microcomputer;PC;stepper motor
TP 242
A
1002-2333(2018)01-0008-04
珠海市重点项目(3200030/070/001/001);广东省大学生创新创业计划2016年省级项目(DC201673)
(编辑立 明)
卢桂萍(1976—),女,硕士,副教授,研究方向为机电一体化系统设计。
2017-04-18
