无人驾驶的填埋场智能遥控设备的设计和应用
2018-12-28赵由才杨继红钱春军戴世金黄仁华周海燕
赵由才,杨继红,钱春军,戴世金,黄仁华,周海燕
(1.同济大学环境科学与工程学院污染控制与资源化研究国家重点实验室,上海 200092;2.山推工程机械股份有限公司,山东 济宁 272999;3.上海老港废弃物处置有限公司,上海 201304)
安全填埋是城市生活垃圾和危险废物处理的一种主要方式[1]。在传统的填埋作业中,往往需要卸料、推平、压实和覆盖等操作,使用的机械设备包括挖土机、运输车、推土机和压实机等机械设备[2-3]。由于填埋场地的不稳定性,极易导致在作业过程中发生翻车、垃圾堆体滑坡、沼气爆炸等事故[4]。同时,由于填埋场作业区域潮湿、恶臭等恶劣的作业环境,尤其是危险废物填埋场地的严重污染,极大地影响了作业工人的身心健康。
为了提升填埋设备的安全性和可靠性,国内外许多学者对其进行了深入的研究,也采取了一些较为有效的防范措施,如采用驾驶室全密封以隔绝臭气、采用加厚钢板以提高行驶安全性等[5]。然而对于长期在垃圾场作业的人员,这些措施只能部分减小受污染程度,填埋设备事故率依然居高不下,不能从根本上解决问题。
就目前技术而言,最有效的途径有两种:无人驾驶技术和遥控驾驶(远距离操纵)技术。美国、日本已研制出第一代无人驾驶汽车,但费用高、技术难度大,因此延缓了其商业化进程[6-7]。相比而言,遥控驾驶技术则显得更加经济、有效。国外学者研制了部分无线遥控的填埋设备,但在价格上,这些产品一般为普通机型的2~3倍,国内用户难以承受[8]。在技术上,这些公司都拒绝转让、公开他们这方面的研究成果。目前来看,国内外还未有无线监控式垃圾填埋设备,因此开发具有自主知识产权的远程控制垃圾填埋设备具有重要意义。
在工业4.0和中国制造2025的大背景下,本文基于无人驾驶的新技术,针对填埋场地的特殊性,开发基于含无人驾驶推土机在内的危险废物和生活垃圾填埋作业技术和设备,设计运行了自动旋转式卸料平台替代传统的固定式卸料平台,使用多功能遥控移动装置,实现了设备工具和相关物品的遥控搬运。无人驾驶设备可在垃圾层或覆盖膜上随意行走,极大的改善了目前现场人工作业的强度和工人的身心健康。为填埋场的无人驾驶设备提供设计思路,也为我国的自主设计和制造贡献力量。
1 遥控推土机
推土机是填埋场的常用设备,常用于生活垃圾或危险废物的填埋-压实-推土-覆土及场地平整等流程。实现推土机的无人驾驶和智能遥控,可有效改进填埋作业的安全性。一般来说,要实现推土机的无线遥控,需要将推土机遥控系统、监视系统、运行状态参数遥测系统、安全运行全自动实时在线监控系统作为填埋设备的附加装置。在现有的推土机上加上该系统便具有相应功能。同时,由于填埋作业的特殊性和连续性,需实现手控/遥控完全兼容。
推土机遥控操作的原理如图1所示。设立远程操作仿真平台,工作人员可在仿真平台上操作操纵杆,同时把操作信号转换成遥控信号,遥控信号发射到接收平台并转换成控制信号,从而驱使推土机上的泵、马达等元件工作。这时,需要对原机型进行电液操纵改造,对设备启动、熄火、油门控制、转向、换档、制动、工作装置动作的手动操纵特点进行研究,确定推土机无线遥控操纵控制策略。开发填埋设备安全运行全自动监控系统,自动检测并判断设备的安全运行状态,及时进行减速或停车以防设备破坏性损伤,确保设备运行安全,实现设备安全运行的全自动实时在线监控[6]。
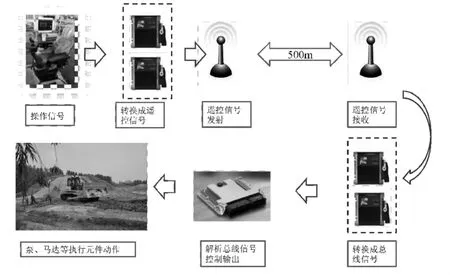
图1 遥控操作的基本原理
目前,山推公司开发的DE17R智能遥控推土机已成功应用于上海老港公司填埋作业,该遥控推土机主要性能参数如表1[9]。该系统可遥控与在机驾驶同步兼容,具有推土机仿真驾驶遥控操作平台,实现1000 m远程遥控控制。推土机具有双向防倾翻功能,防碰撞功能和自动怠速功能。
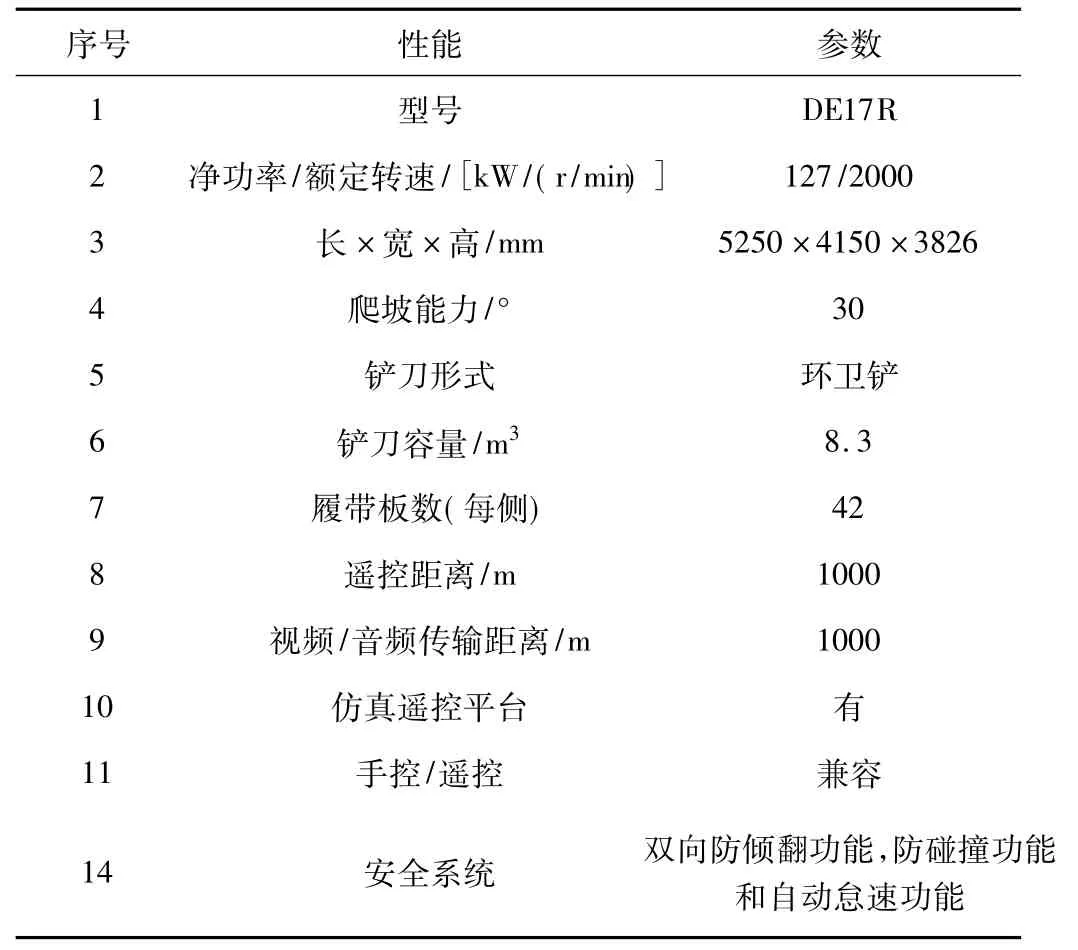
表1 DE17R智能遥控推土机部分参数
无人驾驶的推土机在未来具有较高的优势:
(1)无人驾驶仿真控制平台:遥控操作室模拟推土机驾驶临场感设计,驾驶环境真实、操作更舒适。可在一定操作范围内对推土机的遥控驾驶操作并配有急停按钮确保无人驾驶安全。同时可具有无线视频监控控制,实现对推土机前面、后面、铲刀左刀角、铲刀右刀角及推土机周边环境云台监测。
(2)无人驾驶遥控功能:可远程遥控实现推土机上下电、发动机启动、熄火及油门大小控制。远程遥控操作前进、后退、行进左转向、行进右转向、原地转向、推土机加减速控制及制动控制。远程遥控操作铲刀升降控制、铲刀左右倾斜控制、铲刀浮动控制。
(3)无人驾驶安全系统:可设计防倾翻功能,前后倾斜15°显示报警,25°自动进入怠速制动状态;左右倾斜10°报警,15°自动进入怠速制动状态;防碰撞功能可实现左右及后方5m距离报警、1m自动进入怠速制动状态。推土机自动怠速控制等节能降耗控制;
(4)工况适应能力:静压传动系统,可无级调速、带载转向、原地转向,灵活机动,适应多种工况。底盘系统接地长度长,离地间隙大,行驶平稳,通过性良好;配置环卫铲,容量大。牵引架与刮泥板一体化设计,可牵引、可踩踏;刮泥板加强设计,强度更强、刮泥效果更好。
2 遥控式履带布料机
布料机适用于各种块状、粒状等松散物料堆场堆料。它包括:履带式行走机构、进料装置、皮带机系统、臂架俯仰机构、臂架旋转机构、出料筒系统、液压控制系统等。对于材料稳定的大型堆场一般采用固定式堆取料机,而对于填埋场等临时堆场采用装载机堆料效率很差,颗粒小的物料很难堆到一定高度,且有很大的危险性。目前市场上有简易的堆料装置,其存在以下缺点:堆料效率差;堆料高度低,不适应有粉尘物料[10]。

表2 遥控式履带布料机部分参数
履带式布料机可解决以上问题。其特征是:全部系统安装在移动式平台上,可以在填埋场作业区域内自由移动,行走机构采用履带式,接地比压满足在垃圾表面移动的要求。进料装置与输送悬臂集为一体,二者均安装于一个公共底盘之上,构成一体式移动堆料机。皮带机系统采用直线式,臂架俯仰机构采用液压油缸悬臂拉杆或采用液压油缸推动升降,臂架旋转机构采用液压油缸和回转轴承,出料筒可前后偏摆或回转布料,使整个系统具有完整地独立性。
遥控式履带布料机具有以下优点:
(1)使用的灵活性:不需固定设施,不需要增加基础设施。当不进行作业时,可以清空所有的移动设备,对现存的作业工艺影响小。可以在任意位置堆料,扩大利用空间。该设备可以轻松迁移到其它地方,提升设备的利用率。
(2)设计的科学性:进料装置具备稳流功能,保证连续、均匀、平稳地供料;整套系统实现了环保堆料,无论是采用液压油缸悬臂拉杆或采用液压油缸推动升降,都能使卸料点降到最低水平,减少物料降落的距离;当输送有尘物料时,进料装置设计为厢式,进料口处增加橡胶帘罩;出料槽可前后偏摆或回转布料,设备可移动到码头的任意位置和出料槽的广幅布料极大提高了平均堆料速度。
(3)系统的完整性:配套移动进料装置,让自卸卡车以最快的速度进行卸料,极大提高了运营能力。电力或移动式电站可适应不同的工作环境,输送有尘物料配套高效的除尘设施。
3 自动旋转卸料平台
填埋场用旋转式卸料平台替代固定式卸料平台,主要作业工艺为:运输车经运输通道直接正面驶入旋转卸料平台,由旋转卸料平台完成车头、车尾的互换,进行360°任意方向的卸料,卸料完成再由旋转平台进行转动,使得运输车车头面向运输通道,正面驶离卸料平台。此工艺运输车全部正面驶入(驶离)作业平台,完全脱离倒车上坡,最大程度的避免了车辆翻车事故,减少了填埋作业机械设备的安全隐患。
平台主要由底盘、平台、过渡板、一二级爬坡板、支腿稳定架、动力系统、行走系统、电控系统等组成。平台专用装置的工作全部采用液压传动,液压电磁阀完全采用电控,同时也设计手动应急操作。具有自行走、回转、自带引坡板结构,回转过程平稳、安全可靠,机械化自动化作业程度高、功能齐全、承载能力大、操作方便、外形美观大方等优点,是一种实用的车辆回转卸料平台。

表3 旋转式卸料平台部分参数

图2 车辆在自动回转平台外形图
4 多功能遥控移动装置
该移动装置依靠安装的蓄电池组来提供动力源,蓄电池将电能输出至电机减速机一体机,一体机内部将电能转化为机械能,再在一体机内部将电机输出的高转速动力转化为低转速动力,同时提高输出扭矩,传递至履带式行走机构,从而驱动移动装置的前进、后退、变向等动作。专门用于设备工具和相关物品的搬运,并且自身依靠电能驱动履带式行走机构可在垃圾层或覆盖膜上随意行走,极大的改善了目前现场人工作业的强度。整个移动装置的一些列动作全部由一台手持式的遥控操作手柄来控制完成。
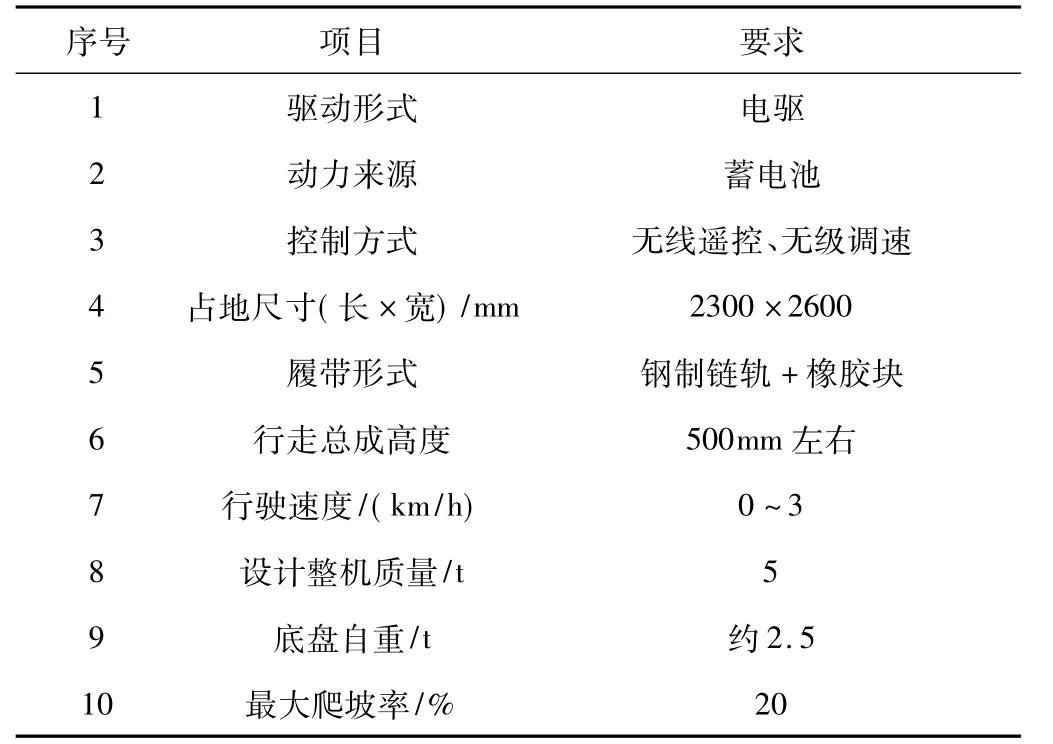
表4 多功能遥控移动装置参数
5 结论与展望
填埋场遥控装置的设计需针对其特殊性,做更高的要求。本文针对目前填埋场中的推土机、布料机、卸料平台、遥控装置等自动化设备,介绍了其基本原理和参数,为后续跟多的装备设计提供思路。
无人驾驶的自动车装备已在国内外悄然兴起,填埋场这一细分领域也开始了远程遥控和无人驾驶的探索。未来,针对更多的设备和装置,自动化水平会逐步提高,可有效解放生产力,降低安全系数。
