部分状粒子处理方法及其对云微物理参数测量的影响∗
2018-12-28黄敏松雷恒池
黄敏松 雷恒池
1)(中国科学院大气物理研究所,云降水物理与强风暴重点实验室,北京 100029)
2)(南京信息工程大学,江苏省气象探测与信息处理重点实验室,南京 210044)
3)(南京信息工程大学,大气环境与装备技术协同创新中心,南京 210044)
(2018年7月24日收到;2018年9月26日收到修改稿)
作为云微物理过程测量的重要利器,机载云降水粒子成像仪在云降水物理与人工影响天气研究中具有重要的作用.从采样结果来看,机载云降水粒子成像仪所测粒子图像中含有大量的粒子图像仅是粒子的一部分而已,即部分状粒子.因其数量较多,对该类粒子所选处理方法不同,会引起测量结果的很大差异.本文介绍并分析了现有部分状粒子处理方法的优劣,通过对部分状粒子的再定义与粒子形状分类,提出了一个融合粒子形状识别技术、“粒径重构”和“中心在内”方法的新的部分状粒子处理方法;利用实测数据,对所提方法与现有方法进行了云微物理参量处理结果的对比,发现本文所提方法与“粒径重构”方法处理结果比较一致,能较好地克服“整体在内”与“中心在内”两种方法存在的缺陷;同时,在针柱状粒子占比较多情形下,本文所提方法要比“粒径重构”方法处理后的结果相对合理.因此本文所提方法对仪器所测粒子数据处理具有更好的适应性.
1 引 言
云是由空气和水凝物粒子构成的悬浮在大气中的可见聚合体,它是地气系统能量平衡和地球水循环的关键[1−4],但在目前的全球气候变化研究中,最不确定的是云过程.云中粒子的准确测量是准确理解云中微物理过程的关键和基础,目前较为准确的云降水粒子测量方式是飞机测量.在飞机所搭载的云降水粒子测量仪器中,基于光电二极管阵列的云粒子成像测量仪(cloud imaging probe,CIP)和降水粒子成像仪(precipitation imaging probe,PIP),这里统称为机载云降水粒子成像仪,是目前国内外使用较为广泛的机载云微物理测量仪器之一.利用该类型仪器所获取的云微物理数据——云粒子谱、云水含量、云粒子数浓度等被广泛应用于云物理研究、数值模式研究以及遥感仪器测量结果的验证等[5−11].从机载云降水粒子成像仪所获取的粒子图像来看有相当多的粒子仅是其某一部分为仪器所记录,如图1所示,对于这类粒子,我们统称为部分状粒子.与此相对应的是,我们将整个粒子形态被完全记录下来的粒子称为完整状粒子.部分状粒子出现的主要原因是仪器采样体积有限而无法完整记录下整个粒子,对这部分粒子的处理方法不同会导致云微物理数据的差异很大[12].
对于部分状粒子参与云微物理参数计算的处理方法,目前主要有“整体在内(ALL-IN)”,“中心在内(CENTER-IN)”和“粒径重构(DIA-RE)”三种方法[12],虽然“整体在内”和“中心在内”这两种方法因其几何计算比较简单而为仪器采用,但这三种方法的优劣以及如何从这三种处理方法之间进行选择,目前并无定论.“整体在内”的方法是由仪器的发明人Knollenberge[5]提出,它仅对完整状粒子图像进行处理,所有部分状粒子均被剔除,这会大大降低仪器的采样效率.“中心在内”的处理方法是目前使用较多的一种方法[12],该方法对于粒子中心在采样体积空间内的粒子均认为有效,可参与云微物理参数的计算,但“中心在内”的方法存在着对部分状粒子中心点判定的难题,且只对球形对称状粒子有效,因此对于混合相态云和冰云中测得的数据,该方法具有一定的局限性.为了克服上述两种方法的缺陷,Heymsfield和Parrish[12]提出了基于粒子球形对称假设下的部分状粒子粒径重构方法,但云中粒子形状复杂,远非一种球形对称状粒子,因此对于非球形对称粒子,特别是针柱状粒子,该方法也是具有一定的局限性.除此之外,该方法还存在着如何准确判定部分状粒子的问题.因此如何恰当地对部分状粒子进行处理成为了准确应用仪器所测数据进行云微物理研究的一道难题.此外,前人所提的方法主要是针对32个光阵单元的老一代光阵探头(2DC,2DP)的研究得出的,现在国内的云微物理探测飞机所装载的光阵探头基本都是美国粒子测量技术公司(droplet measurement technology,DMT)新一代光阵探头(CIP,PIP),CIP和PIP的光电阵列均为64个单元,信号响应速度更快.因此前人所提方法及其阈值也未必适合新一代探头.
本文首先介绍了传统的部分状粒子处理方法,在此基础上通过对部分状粒子的再定义,提出了一个融合粒子形状识别技术、“粒径重构”和“中心在内”方法的新的部分状粒子处理方法;利用实测数据,对所提方法与传统方法进行云降水粒子数据处理结果的对比,分析了几种方法的优劣,从而为仪器所测云微物理数据处理提供参考.

图1 仪器所测的云降水粒子图像中的部分状粒子图像(黑色方框所示) (a),(b)CIP;(c),(d)PIPFig.1.Partial cloud and precipitation particle images measured by the probes:(a),(b)CIP;(c),(d)PIP.
2 部分状粒子及其重构
2.1 完整状粒子和部分状粒子
就单个粒子而言,其被仪器记录下来时的情形可能为图2四种形式中的任何一种.除了图2(a)为完整状粒子之外,其余三种形式均可称为部分状粒子.但是对于任一图形存在着边缘光阵单元像素点时不一定完全就是部分状粒子,比如粒子图像边缘刚好和光阵边缘单元重合的情形,因此Holroyd[13]曾将粒子图像中仅有1个边缘光阵单元的情形不归入部分状粒子;而Korolev和Sussman[14]则将粒子图像中边缘光阵单元总数(Nedgt)大于4以上的粒子才归入部分状粒子.就单个球形状粒子而言,其形状边缘刚好与光阵边缘单元重叠的情形与仪器的分辨率和粒子在仪器采样空间中的位置有关.就无限逼近而言,其应该是一个单元像素点,但实际上,从完整状粒子形态上看,如图2(a),球形状粒子图像边缘的像素点数不只1个,而是多个.考虑到粒子球形对称情形,这里将粒子图像像素中具有不超过2个边缘光阵单元的情形视为完整状粒子,而将超过2个边缘光阵单元数以上的粒子图像称为部分状粒子.

图2 单粒子的记录形态 (a)完整状粒子;(b)部分状粒子,但仅挡住光阵的一边;(c)部分状粒子,但将光阵的两个边缘端皆挡住,且为对称形式;(d)部分状粒子,且挡住光阵两端,但为不对称形式Fig.2.Single particle image:(a)Complete particle;(b)partial particle,but one end element obscured;(c)partial circularly symmetric particle,but both end elements obscured;(d)partial noncircularly symmetric particle obscuring both end elements.
2.2 仪器的采样体积
机载光阵探头的采样体积是一个随粒子粒径变化的参量,同时也是利用仪器测量得到的粒子数据进行云微物理参量计算的一个非常重要的基础参量.Heymsfield和Parrish[12]指出,仪器的采样体积可采用(1)式进行计算:

其中WEA为有效阵列宽度,fDo为探头景深,V为飞行空速,T为飞行采样的时间.
基于粒子处理选择策略的不同,有效阵列宽度WEA有两种不同计算方法[15],即引言提及的“整体在内”(ALL-IN)和“中心在内”(CENTER-IN)的计算方法,基于“整体在内”的WEA计算方法,具体为

而基于“中心在内”的WEA计算方法为

其中sRe表示仪器的测量精度,仪器CIP是25µm,PIP是100µm;N是光电二极管阵列的单元数,仪器CIP和PIP均为64;X则是粒子图像所覆盖的光电二极管数目.
2.3 部分状粒子粒径的重构
Heymsfield和Parrish[12]提出了基于粒子球形对称假设下的部分状粒子粒径重构方法,在满足阈值条件下部分状粒子重构后的粒径D可以分别为

其中(4)式是仅挡住一侧情形的部分状粒子重构后的粒径计算式,Nx表示光阵方向上的粒子粒径,Ny表示飞行方向上的粒子粒径,一般为挡住的光阵边缘单元数,sRe表示仪器的测量精度.(5)式是光阵两端均挡住时部分状粒子重构后的粒径计算式,Ny1和Ny2分别表示两侧分别挡住的光阵边缘单元数.
重构后粒子采样面积为重构后粒子有效宽度与粒子景深的乘积,其中粒子景深依然为探测臂距离所限制.重构后粒子有效宽度和采样体积计算公式分别为

其中为粒径重构后的有效阵列宽度,W为光阵长度,D为粒径重构后的粒子粒径,为粒径重构后的粒子采样体积,fDo为探头景深,V为飞行空速,T为飞行采样的时间.
2.4 针柱状粒子的识别处理
2.3 节粒径重构方法是基于云中粒子皆为球形对称状粒子的假设提出的,但实际冷云中粒子具有不同的形状.基于光阵探头的观测资料,Holroyd[13]和王磊等[16]将云中粒子分为8类,即微小状、线状、聚合状、霰状、球状、六角形状、不规则状和枝状.Korolev和Sussman[14]经过对大量粒子形状统计后认为冰晶粒子形状可以分为球形状,针柱状,枝状和不规则状四种.Heymsfield和Parrish[12]认为球状、板状、霰和枝状均可归为球形对称状粒子,针柱状为非球形粒子,聚合状和不规则状则可能两者兼而有之,但是在高密度场景,聚合状和不规则状则也可以归结为球形对称状.因此,对于冷云中的观测资料,应用Heymsfield和Parrish[12]所提的方法必须准确识别出球形对称状粒子和非球形对称状粒子,即针柱状粒子.考虑到球形对称状粒子所含粒子形状的复杂多样性,这里仅对形状较为简单的针柱状粒子进行识别.由于粒子图像是基于物理挡光成像原理而成,因此,球形对称状粒子图像形状类似于一个圆形,而针柱状粒子图像形状类似于一个长条形.所获取的粒子图像是以二值的粒子图象矩阵存在,如果以光阵方向为x轴和以飞行方向为y轴,则可以建立一个粒子图像坐标系,每一个图像像素均有对应的像素坐标点(Xi,Yi),由于针柱状粒子形状是近似于长条形的,其长轴和方向一般是惟一的,而球形状粒子其长轴和方向则不惟一,如果用最小二乘拟合方法对粒子图像的所有像素点做线性拟合回归,则可以获取粒子图像像素点的线性相关系数值r,r的计算公式如(8)式所示,其物理意义描述的是粒子形状的线性程度.

式中Xi和Yi为粒子图像的像素点坐标值,和分别为图像像素在x轴和y轴坐标点位置均值.一般来说,理想的针柱状粒子的线性相关系数值接近于1,而球形状粒子则接近于0.因此,可以利用线性相关系数r来识别针柱状粒子,但识别前需要准确地确定出该特征量的识别阈值,为此本文构造了部分状粒子图像数据集,分为针柱状与非针柱状(即球形对称状)两类,通过比较两类粒子数据集的线性相关系数r的数值分布,来确定出合适的识别阈值.两类图像的相关系数值分布如图3所示,可以看出以0.5为阈值可以比较多地识别出针柱状粒子的同时可以较少地误判球形对称状粒子,因此最终以线性相关系数值不小于0.5作为部分状粒子中针柱状粒子的识别指标.
虽然部分状粒子中的针柱状粒子可以被识别,但被识别出的针柱状粒子粒径无法采用Heymsfield和Parrish[12]所提重构方法进行准确获取,因此针柱状粒子的粒径仍难以确定.但是Korolev和Sussman[14]经过统计指出针柱状粒子的轴比在3—8之间,在针柱状粒子形状近似于一个矩形时,其中心点刚好位于矩形对角线的交点,对于部分的针柱状粒子而言其中心在内的极端情况是刚好粒子有一半没有进入仪器采样区,此时该粒子中心点刚好位于图像采样后的边缘线上,这时其轴比应该位于1.5—4之间.因此只要部分的针柱状粒子的轴比大于等于1.5时,可判定该粒子中心在仪器采样空间内,可以采用“中心在内”的方法参与云微物理参数的计算.

图3 不同形状粒子图像的线性相关系数值的粒子频数分布 (a)针柱状;(b)球形对称状Fig.3.Frequency distribution of the particle’s linear correlation coefficiency for the partial particles measured by CIP:(a)Non-symmetrial;(b)symmetrical.
2.5 部分状粒子处理方法
基于前述分析,此处提出了对机载云降水粒子成像仪所测部分状粒子进行处理的新方法,也称部分状粒子融合处理方法(简称融合方法).首先判定该粒子是否为部分状粒子,具体以所测粒子图像中包含的光阵边缘单元数(Nedgt)为判断标准,当Nedgt>2时该粒子为部分状粒子;然后利用线性相关系数(r)这一特征量,对该部分状粒子进行粒子形状识别,当该粒子满足r>0.5时,判定该部分状粒子为针柱状粒子;如不满足,则判定该粒子为球形对称状粒子.对于球形对称状粒子,直接采用Heymsfield和Parrish[12]所提的方法进行重构;对于针柱状粒子,则选用“中心在内”的方法,当该粒子的轴比大于等于1.5时,则判定该粒子中心在仪器采样空间内,直接采用仪器所测的粒子粒径值参与云微物理参数的计算.因此,与“整体在内”的方法相比,本方法增加了部分状粒子参与云微物理参量计算的机会,提高了仪器的采样效率;与“中心在内”和“粒径重构”的方法相比,本方法更加注重部分状粒子的具体形状,使得在部分状粒子处理上显得更为合理.
3 不同方法的处理结果对比
利用本文所提的方法与现有的三种方法对2008年7月5日和2010年4月20日山西省人工降雨防雹办公室的探测飞机在太原地区两次降水性层状云中所测的部分航段数据进行处理以获取云中粒子谱、粒子数浓度和冰水含量等云微物理参量,并分析比较不同处理方法对仪器所测云微物理参量的影响,处理前利用文献[17]所提的方法对数据中所包含的伪粒子进行了剔除.其中2008年7月5日的数据为飞机在3700 m高度层左右所测到的粒子数据,时长为7 min多(9:40:11—9:47:16),大体上以近似于球状的霰粒子为主,如图4所示;而2010年4月20日的数据时长为7.5 min(15:52:30—16:00:00)为飞机在3600 m高度层左右所测到的粒子数据,主要以柱状粒子为主,如图5所示.对所选两个航次测量时间内的部分状粒子进行统计,统计结果如表1所示,其中部分状粒子数占比是指部分状粒子数与总粒子数比值,部分针柱状粒子数占比是指部分状中的针柱状粒子数与总粒子数比值;从表1可以看出部分状粒子占比最高可达66.8%,而部分的针柱状粒子占比最高可达24.8%.此外,同一个测量时间内,CIP仪器所测到的部分状粒子占比要高于PIP仪器所测到的部分状粒子占比,这与CIP的采样面积较小有关.

表1 所选航次时间段内测量到的部分状粒子占比Table 1.Proportion of partial particles in the measured period.

图4 20080705航次仪器所测的云降水粒子图像(a),(b)CIP;(c),(d)PIPFig.4.Cloud and precipitation particle images measured in 20080705 by the probes:(a),(b)CIP;(c),(d)PIP.

图5 20100420航次仪器所测的云降水粒子图像(a),(b)CIP;(c),(d)PIPFig.5.Cloud and precipitation particle images measured in 20100420 by the probes:(a),(b)CIP;(c),(d)PIP.
3.1 不同方法对粒子谱测量结果的影响
云粒子谱是云降水粒子群体最基本的微物理属性,具体粒子谱的计算公式如(9)式所示.

其中ni表示第i个尺度间隔内云粒子数浓度的粒径分布函数,Ni为一个采样周期内测得的半径在ri—(ri+∆r)之间的粒子数目,Vsamp为采样体积.
利用上述方法对所选数据进行处理后的云粒子谱数据结果分别如图6和图7所示,图中“PSD_All_In”是指利用“整体在内”的方法求得的粒子谱分布;“PSD_CEN_IN”是指利用“中心在内”的方法求得的粒子谱分布;“PSD_DIA_RE”是指利用“粒径重构”的方法求得的粒子谱分布;“PSD_DIA_R_H”是指利用本文所提方法,即“融合方法”求得的粒子谱分布.
图6(a)为利用四种不同方法对20080705航次中CIP仪器所测量到的云粒子数据进行处理后获得的粒子谱分布图.从图中可看出,“融合方法”和“粒径重构”方法的处理结果基本一致.“整体在内”方法处理后的粒子谱数据数值在1300µm以下均较低,但在1300µm以上突然变高;“中心在内”方法和其他方法处理结果相比有高有低;此外,“整体在内”和“中心在内”这两种方法在处理CIP仪器所测粒子谱数据上出现了粒子谱不连续现象,而“粒径重构”和“融合方法”均保持了粒子谱较好的连续性.Heymsfield和Parrish[12]指出“中心在内”处理后的粒子谱不连续现象是由大粒子数浓度较低以及采样体积较小共同导致的,而“整体在内”所处理得的结果在大部分粒径档处数值偏低以及粒子谱的不连续性与其对于粒子有效性的要求比较高是相关的,最后在大粒径处粒子谱数值较高的原因是“整体在内”方法的有效采样体积随粒子粒径的增大而减小所致.

图6 四种方法对20080705航次所选时间段内仪器所测数据处理后的粒子谱分布 (a)CIP;(b)PIPFig.6.Cloud particle spectra distribution of the selected period during 20080705 research flight obtained from the four processing methods:(a)CIP;(b)PIP.
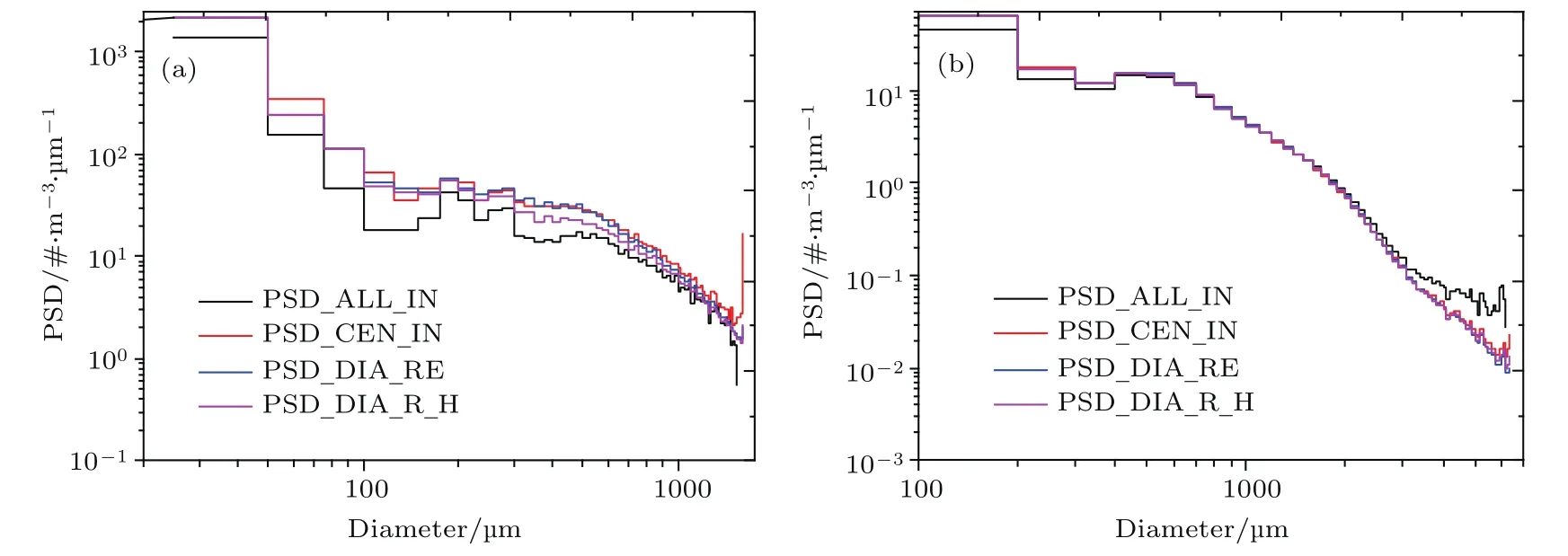
图7 四种方法对20100420航次所选时间段内仪器所测数据处理后的粒子谱分布 (a)CIP;(b)PIPFig.7.Cloud particle spectra distribution of the selected period during 20100420 research flight obtained from the four processing methods:(a)CIP;(b)PIP.
图6(b)为四种方法对20080705航次PIP仪器所测数据进行处理所得粒子谱结果,从图中可看出四种方法处理后的粒子谱均具有较好的连续性.就具体数值而言,“融合方法”与“粒径重构”方法所求结果基本一致;“整体在内”方法所求的的粒子谱在1300µm以下结果相对较小,但在1900µm以上则大于其他三种方法处理后的粒子谱值.
图7(a)是利用文中所提的4种方法对20100420航次所选时间段内CIP仪器所测数据处理后的粒子谱分布,从中可看出四种方法处理后的结果均具有较好的连续性.就具体数值而言,利用“整体在内”方法求得的粒子谱值在有效的粒径档范围内均是最低的.在100µm以下,“融合方法”的处理结果和“粒径重构”的方法差别不是很大;但在100µm以上粒径段,“融合方法”所处理得到的粒子谱值均低于“中心在内”的方法和“粒径重构”方法所求得的粒子谱值,尤其在300µm以上粒径段更为明显.“融合方法”相较另两种方法数值较低的原因是,在针柱状粒子占绝大多数的情形下,对于部分状粒子的中心是否位于采样体积内采取了更为严格的判定,因此有效粒子数较其他两种方法更少.
图7(b)为利用文中所述4种方法对20100420航次所选时间段内PIP仪器所测数据处理后的粒子谱分布图,从中可以看出“融合方法”处理后的结果与“中心在内”和“粒径重构”方法处理后的结果较为一致;而“整体在内”方法在1000µm以下粒径处求得的粒子谱数值较小,但在1600µm以上其处理后的粒子谱值均高于其他三种方法处理后的粒子谱值.

图8 20080705航次时间段内测量得到的粒子数浓度数据 (a)CIP;(b)PIPFig.8.Cloud particle number concentration of the selected period during 20080705 research flight obtained from the four processing methods:(a)CIP;(b)PIP.
3.2 不同方法对粒子数浓度测量结果的影响
粒子数浓度表示的是单位体积内的粒子总数.根据(10)式进行计算.其中Nd为粒子数浓度,Nn为粒子个数,Vsamp为采样体积,其计算公式如(10)式所示:

利用文中所述四种方法对所选航测时段内的粒子数据处理后的粒子数浓度如图8和图9所示,图中“CON_All_In”是指利用“整体在内”的方法求得的粒子数分布;“CON_CEN_IN”是指利用“中心在内”的方法求得的粒子数浓度分布;“CON_DIA_RE”是指利用“粒径重构”的方法求得的粒子数浓度分布;“CON_DIA_R_H”是指利用“融合方法”求得的粒子数浓度分布.
从图8和图9可以看出,无论是CIP仪器还是PIP仪器,“中心在内”方法处理后的粒子数浓度均高于其他三种方法,基本上是其他方法的2—3倍以上,这在粒子数浓度较大的时间段内更为明显,这与其对部分状粒子有效性的要求较低以及采样体积计算相关,因为其对粒子有效性要求比较低,这样会导致有效的部分状粒子数较多,而其他方法对粒子有效性要求高,因此其他方法有效的部分状粒子数就较少,再加上“粒径重构”和“融合方法”在粒径重构时采样体积是变大的,但粒子数浓度与粒径大小是无关的,因此,导致“中心在内”方法处理后的粒子数浓度相比其他三种方法异常偏高.“整体在内”方法处理后的粒子数浓度值在四种方法中基本处于最小值这样一种状态.“融合方法”与“粒径重构”方法处理后的粒子数浓度值位于“中心在内”和“整体在内”之间,就20080705航次而言(图8),“融合方法”与“粒径重构”方法处理后的粒子数浓度值基本一致,但在柱状粒子数占大多数情形下的20100420航测时段(图9(a)),“融合方法”处理后的CIP所测粒子数浓度值要稍微低于“粒径重构”方法处理后的数值,这可能与“融合方法”对柱状粒子进行了有效判别有关;而对于PIP仪器的测量结果,“融合方法”与“粒径重构”方法处理后的结果基本一致(图9(b)),从表1可知该时段内PIP仪器所测粒子数据中部分状粒子,尤其是部分状粒子中的针柱状粒子出现比例较低,这个是和仪器的采样体积和分辨率休戚相关的.因此在相同的云环境下PIP所测的部分状粒子数要少于CIP所测部分状粒子数,在部分状粒子出现比例较低的情况下,本文所提方法与“粒径重构”方法处理的结果差异不明显.

图9 20100420航次时间段内测量得到的粒子数浓度 (a)CIP;(b)PIPFig.9.Cloud particle number concentration of the selected period during 20100420 research flight obtained from the four processing methods:(a)CIP;(b)PIP.
3.3 不同方法对冰水含量测量结果的影响
冰水含量CIW的计算利用(11)式进行计算:
其中L表示探测飞行的距离,Sj则表示与粒径相关的采样面积,mj表示与粒径相对应的冰粒子质量,可利用质量-维数的关系方法进行计算[16],如(12)式所示:

其中mj是粒子质量,单位是g;Dj是粒子粒径,单位是µm;a=7.38×10−11,b=1.9.
图10和图11是利用四种方法处理后的云中冰水含量分布图,图中“IWC_All_In”是指利用“整体在内”的方法求得的云中冰水含量分布;“IWC_CEN_IN”是指利用“中心在内”的方法求得的云中冰水含量分布;“IWC_DIA_RE”是指利用“粒径重构”的方法求得的云中冰水含量分布;“IWC_DIA_R_H”是指利用“融合方法”求得的云中冰水含量分布.
从图10(a)和图11(a)可以看到,利用“整体在内”方法求得的冰水含量值与其他三种方法差异比较明显,该方法会导致从CIP仪器测得的冰水含量峰值时刻以及具体数值出现偏差;而“融合方法”与“粒径重构”方法处理后的结果较为一致;在部分针柱状粒子较多的航测时段(图11(a)),“融合方法”对CIP仪器所测数据处理后的冰水含量值要小于“粒径重构”方法处理后的结果.对PIP仪器而言,“融合方法”与“粒径重构”方法处理后的结果也较为一致,“中心在内”的方法在某些时段会偏低(图10(b)),这可能与该时段内部分状粒子的粒径较小有关,而“整体在内”的方法在针柱状粒子较多场合又偏高(图11(b)),从表1可知,该时段内完整状粒子占比较高,而从图7(b)可看出,该时段内利用“整体在内”方法处理后的粒子谱在大粒径段是比较高的,因为“整体在内”方法的有效采样体积计算是粒径越大,体积越小,而冰水质量是粒径越大,质量越大,因此两方面因素的叠加导致了“整体在内”方法求得的冰水含量结果较高.

图10 20080705航次时间段内测量得到的冰水含量 (a)CIP;(b)PIPFig.10.Ice water content during the measured period in the 200800705 flight:(a)CIP;(b)PIP.
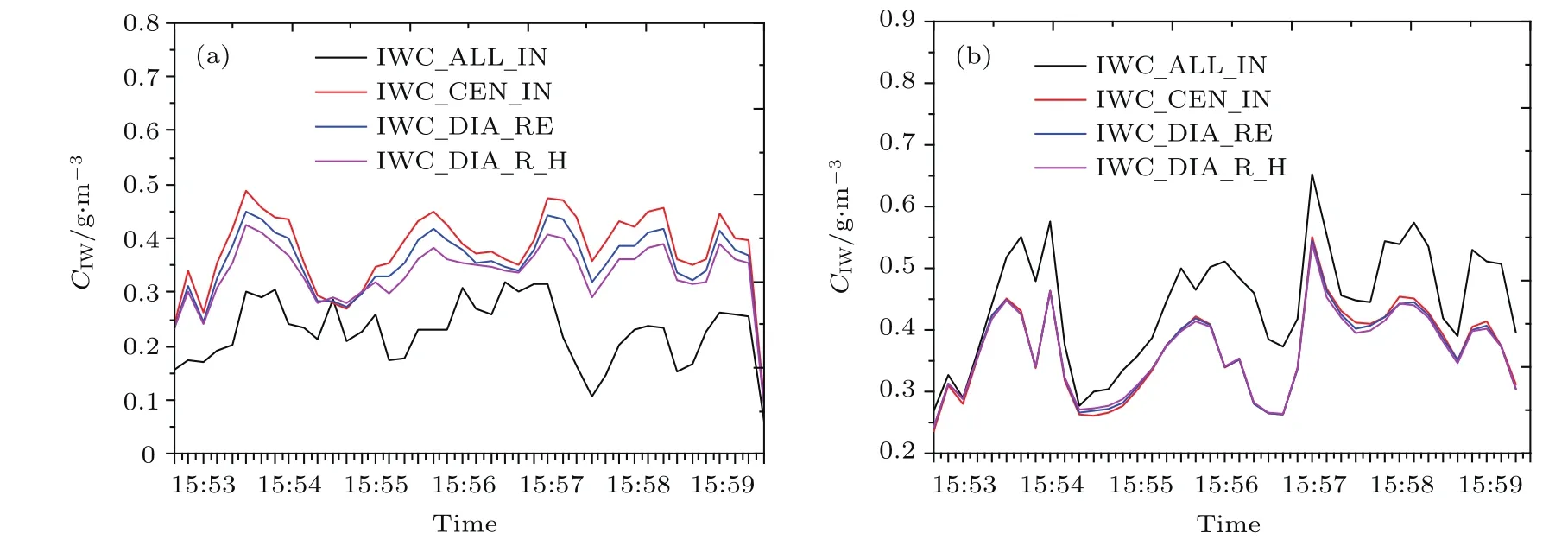
图11 20100420航次时间段内测量得到的冰水含量 (a)CIP:(b)PIPFig.11.Ice water content during the measured period in the 20100420 flight:(a)CIP;(b)PIP.
4 结论与讨论
CIP与PIP是目前云降水微物理飞机测量仪器中两款较为重要的成像测量仪器.由于这两款仪器的采样体积比较有限,导致了仪器测量结果中部分状粒子的存在.利用文中所提的四种部分状粒子处理方法对两个不同航次仪器所测粒子数据进行处理,对处理后的结果进行对比分析,得到以下结论.
1)就CIP仪器而言,“整体在内”的处理方法会导致其所测云粒子谱出现不连续情形以及云中冰水含量及其峰值出现时刻发生偏差的情形,与其他三种方法相比,“整体在内”的方法求得的云微物理参数值整体偏低.“中心在内”的处理方法也会导致其所测云粒子谱出现不连续情形以及云中粒子数浓度异常偏高的现象.相较而言,本文所提的方法和“粒径重构”方法能够较好地克服“整体在内”和“中心在内”在数据处理结果上存在的问题.在针柱状粒子出现比例较低的情形下,这两种方法所求得的结果基本一致,但在针柱状粒子出现较高比例的情况下,本文所提的方法处理的结果要稍微低于“粒径重构”的方法.
2)就PIP仪器而言,四种方法处理后的云粒子谱均没有出现不连续情形,本文所提的方法与“粒径重构”方法处理后的数值基本重叠;在粒子数浓度上,“中心在内”方法会导致处理后的结果异常偏高,基本是其他方法的2—3倍以上,“整体在内”的方法处理后的结果均是最低,而本文所提的方法与“粒径重构”方法处理后的结果基本一致,位于“中心在内”和“整体在内”处理后的结果中间;就冰水含量而言,在部分针柱状粒子含量较少时段内四种方法处理后的结果差别不是很大,但在部分的针柱状粒子大量存在的时段,本文所提的方法处理后的结果与“中心在内”和“粒径重构”方法处理后的结果较为一致,但小于“整体在内”处理后的结果.
整体而言,本文所提的方法与“粒径重构”方法表现比较一致,能够较好地克服“整体在内”与“中心在内”两种方法存在的缺陷;但在针柱状粒子占比较多情形下,本文所提的方法要比“粒径重构”方法处理后的结果相对低一些.虽然缺乏准确的结果做比对,但考虑到本文方法对部分状粒子的处理上要比“粒径重构”更加合理,我们认为在针柱状粒子出现较高比例下本文方法处理后的结果要相对合理.尽管本文所提的方法处理后的结果仅是相对合理,但考虑到针柱状粒子是云中主要的冰晶形态之一[7,19],其主要的生长温度区间是−4—8◦C;而这样一个温度区间也是目前云物理测量飞机所经常探测的区间;除此之外,云中冰晶繁生、云中粒子自身跌落、云中上升和下沉气流等云中微物理与动力过程[20,21],也会令云中其他高度和温度区间分布有针柱状这一形态的冰晶粒子,因此无论对于CIP仪器,还是PIP仪器所测粒子数据进行处理均建议采用本文所提方法.
感谢山西省人工降雨防雹办公室提供的飞机航测资料.
