车流量实时检测的交通灯配时监控系统设计
2018-12-28孙竹梅张玥玥
孙竹梅,张玥玥,王 琦,王 政
(1.山西大学自动化系,山西 太原 030013;2.山西省实验中学,山西 太原 030031)
0 引言
传统城市干道的十字路口交通信号控制系统是按固定方式运行的定时控制系统。该控制系统有两点不足:在车流量较少的夜间,由于交通灯仍按固定方式运行,会造成不必要的通行等候;在车流量大的白天,尤其是车流高峰时段,在直行车道上经常出现交通拥堵,降低了道路的通行能力。
本文提出一种基于车流量实时检测的控制方案。该方案可根据车流量大小,及时合理调配十字路口各个方向信号灯时长,实现交通灯的有效控制,保持道路畅通;借助监控组态技术,创建远程监控系统,远程监控道路的通行状况,将有助于提升交通管理的自动化水平。
1 现场情况调查分析与总体设计思路
某十字路口东西方向是连接居民区的主干道,车流量相对较小,车流高峰时段为早上和傍晚。南北方向为连接商业区和中小学校的主干道,在早7时至晚22时车流量都比较大,而且具有不确定性。南北方向在车流高峰时,车流量比东西方向大。另外,该十字路口左转方向车流量相对较小,且平稳。
通过对现场交通状况调查,重新设计交通信号灯控制系统,以减少不必要的通行等候时间,缓解道路的拥堵情况。系统总体设计思路如下:将交通灯控制模式分为日间繁忙模式、日间正常模式和夜间模式,编写相应的交通灯配时控制程序。车流量检测系统实时检测车流量,可编程逻辑控制器(programmable logic comtroller,PLC)根据车流量实际情况调用不同的交通灯控制程序,自动合理调配各方向的红绿灯时长。
2 设计方案
基于车流量实时检测的交通灯远程监控系统分为上位系统、下位PLC控制系统和现场监控设备。上位系统为计算机,显示WinCC监控组态画面,实现可视化监视和控制;下位PLC控制系统主要由电源模块、CPU模块、数字量输入输出模块组成;现场监控设备主要包括车流辆检测系统和交通信号灯被控对象[1-2]。系统结构如图1所示。
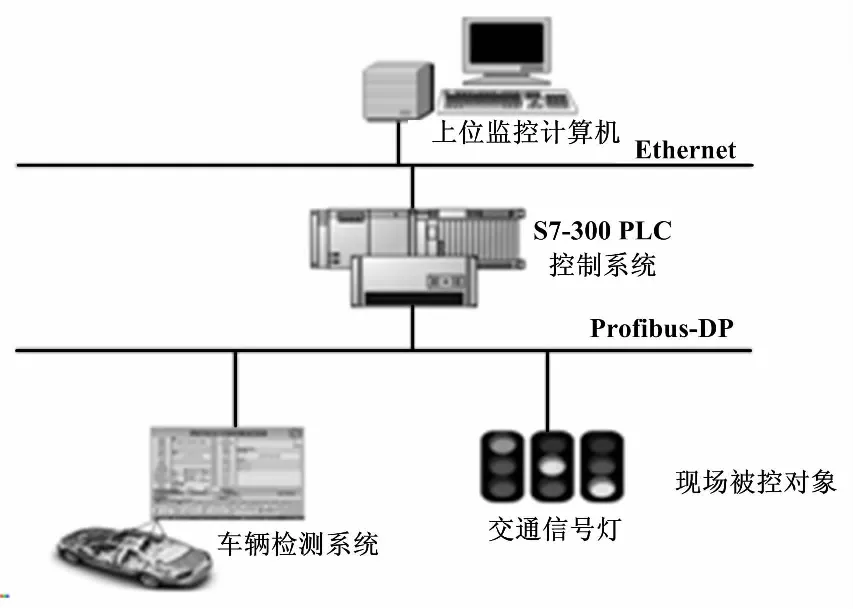
图1 系统结构图
2.1 车辆检测系统
车流辆检测系统由220 VAC电源、地感线圈、线圈引线(双绞线)和地感线圈检测器组成,其结构如图2所示。
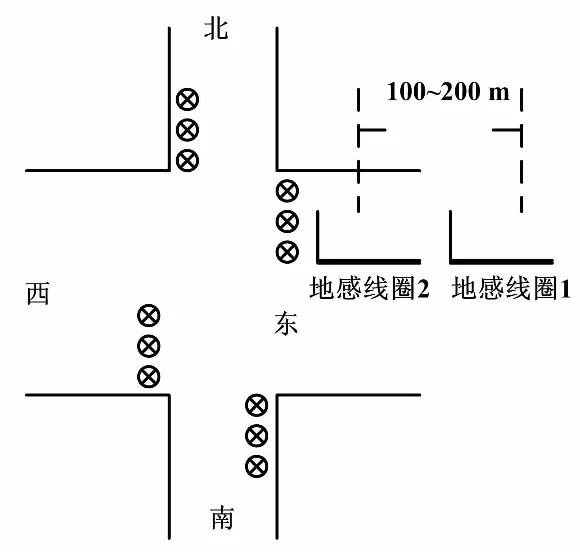
图2 车流辆检测系统结构图
地感线圈、线圈引线(双绞线)和地感线圈检测器(电容C)三者构成了LC振荡电路。
其振荡频率(f)可由式(1)算得。
(1)
式中:C为常数。
当有金属物通过地感线圈时,电感L发生改变。L值与线圈匝数、线圈的面积、线圈引线的长度和线圈中的介质有关。在匝数、面积、引线的长度都确定的前提下,电感值只与介质有关,即振荡频率与线圈内通过的金属物体有一一对应关系。当振荡频率相对于基准频率发生变化时,车流辆检测系统输出电压为5 V的脉冲信号,据此判定有一辆车通过。通过统计车流辆检测系统输出5 V脉冲信号的次数,可以确定车流量的大小。
在东西向、南北向各设4个地感线圈,共计8个(因每一方向的红绿灯时长应保持一致,顾只需铺设十字路口每一方向任一侧),如图2所示(只画出一个方向直行道路的地感线圈),以统计每个方向直行和左转的车流量。线圈2铺设在十字路口人行横道内测黄线处,线圈1则可铺设在距离线圈2的100~200 m(也可根据实际路段长度而定)处。对线圈1和线圈2的检测信号作差,即可得该方向的车流量。由于右转车辆不受信号灯限制,故不作统计。
2.2 下位PLC控制系统
下位PLC控制系统采用西门子S7-300,由电源、CPU、输入/输出模块组成。西门子S7-300 PLC控制系统与上位系统通过工业以太网通信,与现场监控设备通过Profibus-DP现场总线通信[3]。
3 程序设计与调试
3.1 交通灯实时控制程序分析
交通灯实时控制系统的控制模式分为日间繁忙模式、日间正常模式和夜间模式3种。PLC根据车流量实际情况调用不同的控制程序,自动、合理地调控交通信号灯绿灯时长。
程序由组织块OB1块、OB35块和10个功能(function,FC)子程序组成。组织块OB1块读取车流量实时检测信息,经过与设定值的比较,判断当前所对应的交通灯控制模式;通过调用FC子程序执行相应的控制程序,改变交通信号灯时长,从而控制车辆通行。考虑到交通控制系统的整体调度,当接到上位系统的控制指令时,优先执行上位控制指令。上位控制指令执行的相关程序放在组织块OB35中[4]。OB35是放置中断执行程序。为配合其他道路的交通,以及管理员对整个市内交通的整体调度而编写的程序,该运行方式可以随时无条件地执行,以提高城市道路整体通行能力和自动化管控水平。
交通信号灯控制系统中,东西方向直行程序流程如图3所示。
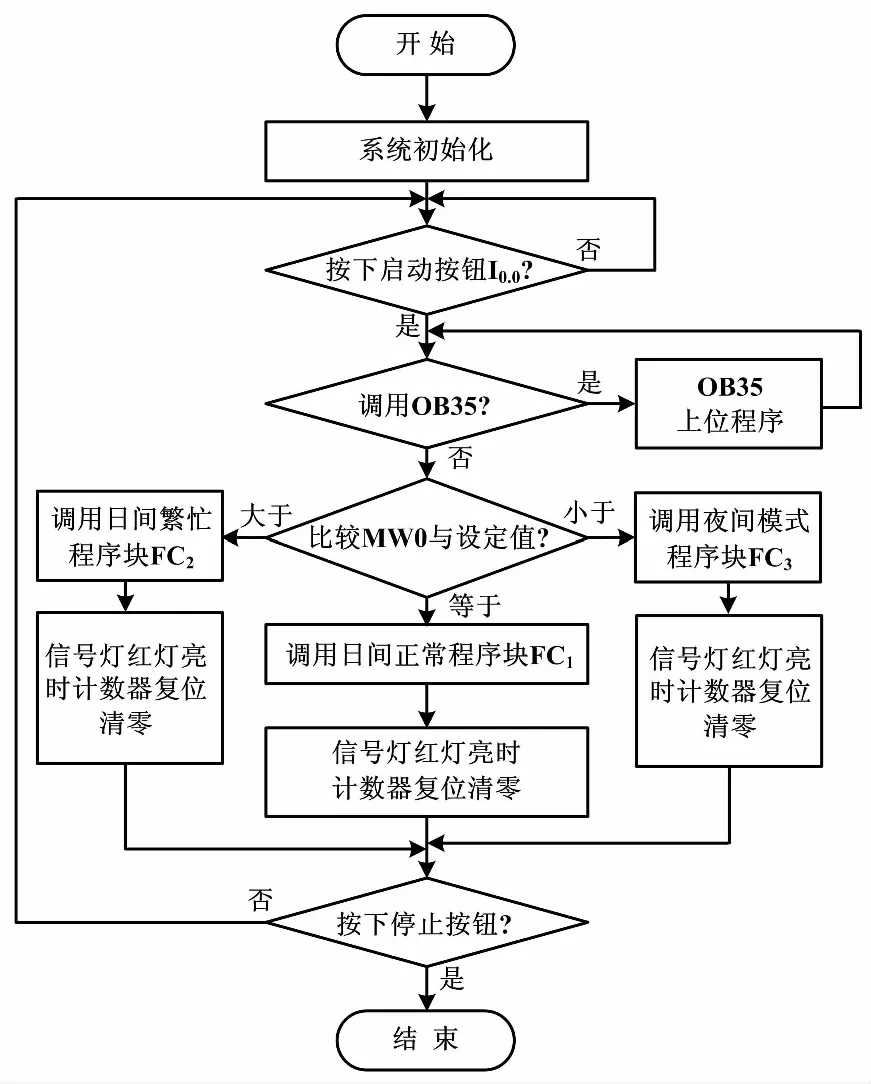
图3 东西方向直行程序流程图
以东西方向直行交通灯控制为例,将地感线圈1和地感线圈2检测的脉冲信号作为下位PLC控制系统加减计数器的两个输入。地感线圈1的脉冲信号是PLC程序加减计数器的CU端子输入信号,地感线圈2的脉冲信号是PLC程序加减计数器的CD端子输入信号,加减计数器的CV端子输出值MW0是东西直行方向红灯时滞留的车辆数,加减计数器的CV端子输出值MW0与3种交通灯控制模式的各设定值进行比较。根据比较结果,确定当前交通状况类型,然后调用相应FC块,执行对应的交通灯配时程序。东西直行方向的计数器在绿灯后复位清零,红灯后计数器开始计数。东西左转、南北方向直行与左转的控制相同。PLC控制系统周期扫描,实现了基于车流量检测的交通灯实时控制[5-6]。
下位PLC控制系统采用西门子S7-300 PLC控制系统,工程师可以随时在线修改程序,修改交通灯的时长,并能够根据实际情况编写更合适的程序,在线下载并立刻投运,使得交通更为顺畅、合理。这是现在其他控制器不容易实现的。西门子S7-300 PLC的可靠性高,尤其在城市中电感、电磁等多种干扰共存的情况下,可以平稳地运行。
3.2 上位系统实时监控系统设计
西门子视窗控制中心SIMATIC WinCC可用于实现数据采集、数据分析管理、画面动态显示、报警记录以及变量归档等功能[7-9]。在创建项目工程后,添加通信连接、建立过程变量、创建过程画面、改变画面对象属性,保存下载,运行工程,实现对交通灯的实时监控[10]。
实时监控画面中包含系统的启动、停止按钮;根据实际运行情况,可以在画面上实现手动/自动运行方式的切换,并能够顾全大局,实现上位控制。
4 交通灯实时监控系统效果
采用监控组态技术,在上位系统中创建变量和人机接口画面,并建立变量与人机接口画面之间的连接。该系统远程监控画面可以显示所有下位PLC控制系统及现场设备的实时检测参数、交通灯状态等信息,方便监控室的监控人员了解路口交通情况。监控人员也可以根据整个路段的交通需求进行统一调配,随时更改交通灯的运行时长[11],使得系统更及时地适应现场需求。
十字路口的监控信息可以通过光纤和以太网汇集到城市交通监管中心,为城市路面交通的统筹协调提供便利。
5 结束语
本文针对城市高峰、夜间、正常交通现状,提出了根据实际交通状况对交通灯进行实时配时的方案。通过地感线圈对车流量实时监测,编写西门子PLC设计控制程序。针对日间正常、高峰以及夜间车辆少等情况,采用不同的控制方案,及时、有效地缓解了交通压力,提高了道路的利用率。同时,为配合全市交通统一调度,设计了上位控制方式。整个系统可以实现就地、远程、手自动切换,以及对上位指令的响应。系统通过多种功能的自动调用,实现了对市内交通的全局控制。
