基于地磁 /惯性算法的行人导航系统设计
2018-12-26海青
,, , , ,海青,
(陕西省地方电力(集团)有限公司宝鸡供电分公司, 陕西 宝鸡 721000)
0 引言
目前,市场中使用较多的可以实现行人定位导航功能的导航系统,主要是全球定位系统GPS[1]。由于城市中高楼林立的地段对有源信号有屏蔽效应,导致该区域无法很好地接收到卫星信号,因此对导航系统的连续性造成了很大的挑战。具有自主性的不太依赖GPS的行人定位系统成为导航发展的主要方向[2]。其存在的问题则被自主式导航系统和有源与无源组合导航系统完美解决,将地磁等导航方式与GPS联合,可以弥补不能连续定向的缺点和其他外界因素带来的影响[3]。从而实现利用多种信息源互相补充和校正,构成一种准确度更高的多信息源组合导航系统[4]。
惯性导航系统可以全天时、全地域地作为一种自主式的导航系统来工作。地磁导航系统作为一种无源式导航形式,不仅可实现自主导航,而且还具有高精度的特点[5]。在此,将地磁和惯性两者组合的导航算法应用于行人系统中,具有不受区域限制,以及在各种场合下精度高、应用范围广的优点。
1 系统设计原理
地球的磁场分布有其独特的特点,测量地磁的各种信息,可以为地磁导航提供依据。地磁行人导航的主要原理就是利用这些信息与已知地磁图进行匹配,从而确定行人的位置[6]。
在已知行人运行经过区域的地磁基准图时,地磁/惯性行人导航系统在设计结构上主要包括显示、位置监测、速度监测和无线传输。系统可以获取到行人的位置数据、行走方向和行走速度,并将数据显示。其中,位置检测、速度检测和方向检测是系统的重要组成部分,用来实现系统的主要功能。位置检测得到经纬度等信息,速度检测得到系统的三轴加速度及速度,方向检测获得系统的航向角信息,最终由主控制器处理后,由显示模块将这些信息显示出来。具体的系统结构如图1所示。
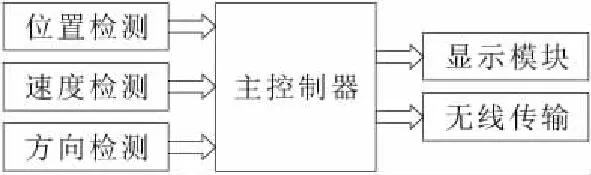
图1 系统结构
2 系统硬件软件设计
2.1 位置检测电路
位置检测电路选用GPS模块。GPS模块是以UART形式输出的。模块RX接单片机或USB转TTL的TX,TX接RX[7]。GPS模块的TXD口与52单片机的RXD(P3^0)连接,如图2所示。测试时加上天线,放置于阳台外黑面朝天,以接收信号。因系统采用的GPS模块较小,所以在室内的信号较弱,需等待1~2 min,待PPS信号灯1 s 1次闪烁,表示已经定位。其定位信息将传输到显示模块,显示模块将实时显示所接收到的经纬度信息。
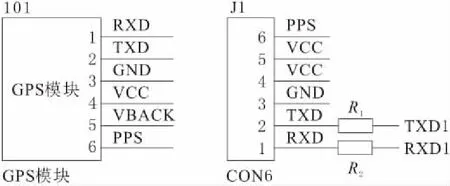
图2 GPS接口电路
2.2 速度检测电路
速度检测选用MPU6050模块。美盛的MPU6050原理如图3所示,其中IIC最大通信速率能够达到400 kHz,SPI最高通信速率能达到20 MHz,为了提高姿态更新的速率,选用的是SPI通信。陀螺仪工作电流5 mA,待命电流只有5 μA,加速度工作电流为500 μA,工作电压3.3 V±5%。其工作原理是:MPU6050 被封装为1个盒子,盒子内部装有1个小球,当盒子发生倾斜,在重力作用下,小球就会滚动压到盒子的内壁,重力的分量改变内壁上压敏电阻的阻值,从而将重力信息转化为电压或者电流信息[8],其接口电路及其设计如图4所示。MPU6050模块添加了电源指示灯,方便显示模块运行情况,并且支持5 V到3.3 V电源供电[8]。SCL与SDA通过上拉电阻连接到电源,AD0另接100 kΩ电阻后接地。当连接使用多个MPU6050模块时,AD0可以选择接高低电平,它会改变MPU6050模块的IIC地址。

图3 MPU6050原理

图4 MPU6050和电源模块原理
2.3 方向检测电路
方向检测采用的是QMC5883L弱磁磁场测量传感器。通过构建1个库,实际测量时利用数据匹配,确定行人位置A,GPS可以得到1个定位B,A和B利用数据融合办法进行处理。此模块通过IIC进行通信,来获取数据信息[9]。霍尼韦尔QMC5883L 是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯片。其经常应用于低成本罗盘和磁场检测领域。QMC5883L 包括最先进的高分辨率HMC118X 系列磁阻传感器,并附有霍尼韦尔专利的集成电路。其包括放大器、自动消磁驱动器、偏差校准,以及12 位模数转换器,能使罗盘精度控制在1~2°。QMC5883L采用无铅表面封装技术,带有16引脚,如图5所示,其尺寸为3.0 mm×3.0 mm×0.9 mm。通过地磁场的数据和加速度数据获得初始四元数,再利用陀螺仪的输出值更新四元数,将更新的四元数转换成欧拉角;利用欧拉角的横滚角及俯仰角结合地磁场数据,得到新的航向角;再计算得到航向角和欧拉角中的航向角,利用互补滤波进行融合得到航向角,接口电路如图6所示。
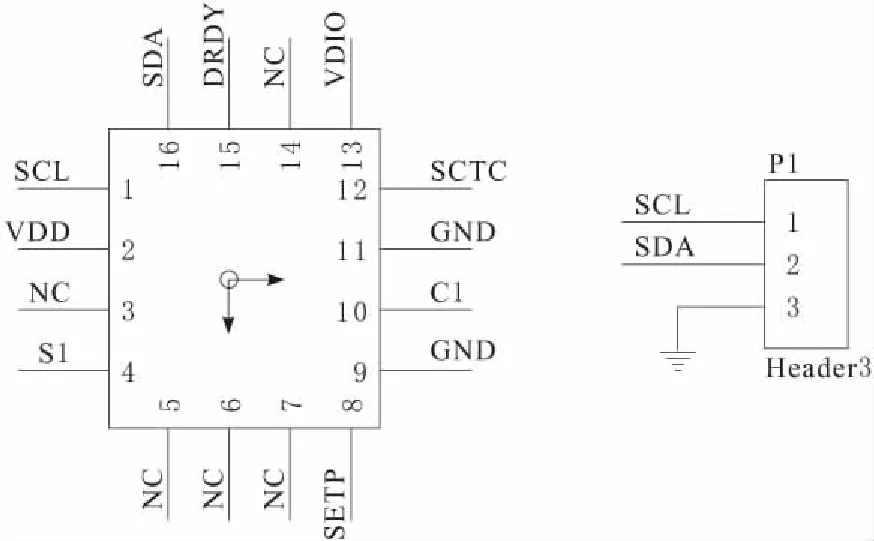
图5 QMC5883L引脚 图6 接口电路
2.4 无线传输电路
无线通信通过蓝牙模块实施,选择蓝牙通信中的命令模式进行数据传输,也就是AT指令进行操作[10-11]。单片机通过串口对蓝牙模块进行操作,单片机的RXD P3.0和蓝牙模块的TXD连接,单片机的TXD P3.1和蓝牙模块的RXD连接,如图7所示。在实物中没有展示出此功能,但预留了实现此功能的接口。此功能可以用来进行人机分离的功能实现。

图7 蓝牙模块接口电路
2.5 系统软件设计
本设计整体软件开发包含几个内容:数据显示、位置检测、速度检测和无线传输(预留)。系统可以获取行人的位置数据、行走方向和行走速度,并将数据进行显示,或者通过蓝牙进行传输[12]。系统软件设计流程如图8所示。
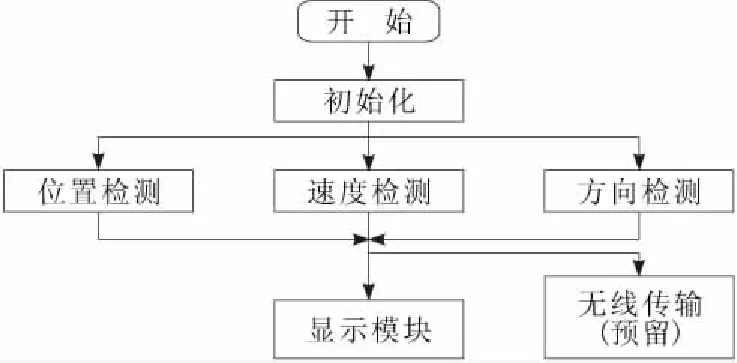
图8 软件设计流程
3 系统设计结果
按照上述设计电路,将搭建好的实物上电测试,液晶显示数据如图9所示。左侧显示内容为角度和加速度数据,右侧显示采自GPS的实时数据。如图9a所示,液晶第1行显示“A:252.1”,即为欧拉角度数据,若触动QMC5883L弱磁通传感器则可改变角度;液晶第2行显示“x:03.3g”,即为X轴方向的加速度数据;液晶第3行显示“y:00.5g”,即为Y轴方向的加速度数据。可通过MPU6050运动处理传感器改变其数据,如图9b所示。加速度测试如图9c所示,X轴和Y轴方向的加速度均较之前有所增大。通过上述调试可知,设计的地磁惯性系统可较准确显示行人的位置和行走信息,为导航提供相关数据。
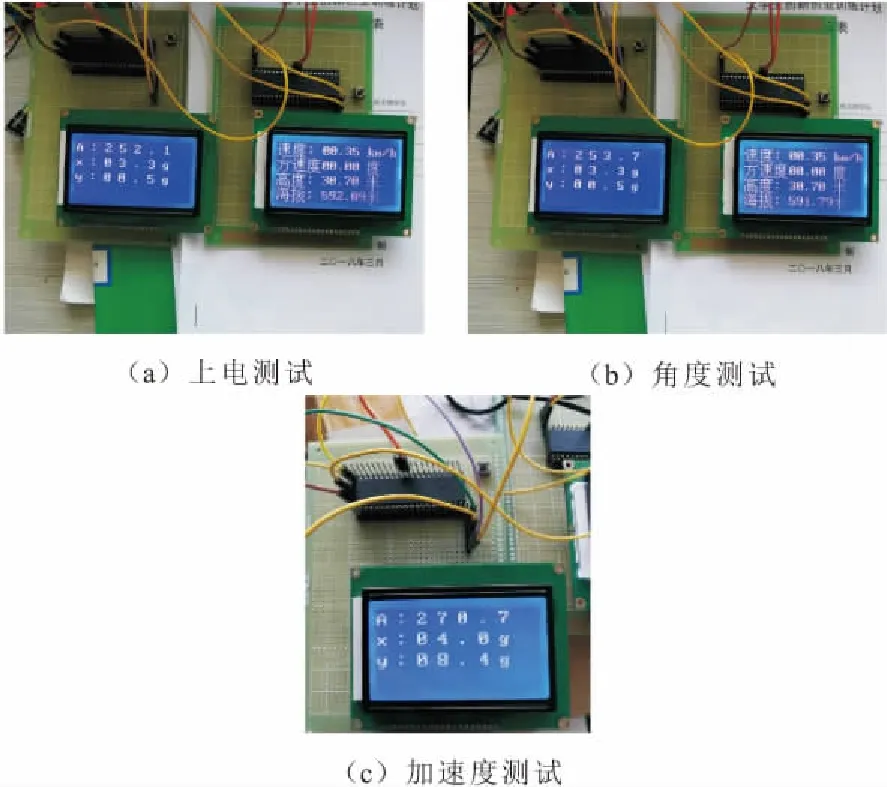
图9 上电测试实物
4 结束语
利用地磁惯性算法,设计了行人导航系统的位置、速度、方向以及无线传输电路。在搭建的实物模型上,测试行人的GPS位置数据、行走方向和行走速度,并通过LCD12864进行数据显示。该设计定位不依赖于卫星信号的接收,可以较准确地获取行人的位置数据、行走方向和行走速度。该定位方法还可应用到工业AGV无人搬运车、作战平台以及飞机的导航。