一种推土机智能安全制动控制方法
2018-12-26张士聪房翡翡于中有
张士聪,房翡翡,于中有
(山推工程机械股份有限公司,山东 济宁 272000)
1 存在问题及解决
如今,工程机械操作人员对工程机械驾驶舒适性、可靠性以及设备寿命周期提出了更高的使用要求,如果推土机制动不平稳甚至产生剧烈震动时,不仅会对推土机制动系统带来较大冲击,增加推土机各零部件损坏的可能性,而且会严重影响驾驶舒适性,增加操作人员的劳动强度。另一方面,对于静压驱动的设备,电磁阀是最常用的控制执行元件,而电磁阀的频繁动作也会带来许多隐患,比如制动电磁阀频繁动作时,线圈会发热、加速老化等,最后出现卡阀现象,导致无法实现制动,因此,简单制动控制模式对特定工况的适应是不够的。
随着推土机电控技术和液压技术的不断发展,静压驱动推土机已经成为推土机发展的一种趋势,目前国内静压驱动推土机控制系统,还处于研究起步阶段,而专门针对制动控制系统的研究更是少之又少,与世界先进水平相比还有较大差距。
现有系统制动控制方式多以手柄回中位或制动踏板是否踩到底来直接判断有无制动需求,这种制动方式的不足是:如果设置的制动延时长会造成坡道溜坡较长,如果设置的制动延时短会造成车速未降至零,导致制动冲击。
本文提出一种智能控制方法,能够有效解决静压驱动推土机现有制动系统存在的制动溜坡、制动延时长、稳定性差等缺点,并且可以减少制动电磁阀因频繁动作带来的发热、磨损等影响使用寿命的问题,有效延长制动系统执行元件的使用寿命,在特定情况下还可以更迅速地响应操作者的驾驶命令,驾驶操作更流畅。
2 智能安全制动控制的三种情况
本文提出的制动控制方式包括以下3种情况。
1)坡道制动 当推土机爬坡作业并有制动需求时,由于推土机自身重力的原因会产生一个与行驶方向相反的力,这个力会使推土机出现溜坡现象,这样会对推土机本身及周边产生安全隐患,因此溜坡现象是应该避免的。本文提出了一种静压驱动推土机坡道溜坡检测及制动的控制方法,当操作者踩下制动踏板直至最低或行走控制手柄回中位时,控制器会根据踩踏角度或者行走控制手柄位置计算出液压泵和液压马达控制电流的控制值,推土机车速随控制电流减小而降低,直至速度为零。而液压泵和液压马达控制电流已经减小到最小值,即说明操作者有制动需求,此时如果控制器检测到左右两侧马达有速度,说明推土机有溜坡现象或有溜坡的趋势,这样制动电磁阀会立即断电,实现整车液压制动。
2)非坡道制动 当推土机在平地作业制动或在不足以造成推土机溜坡的缓坡道上作业制动时,控制器检测不到左右两侧马达速度值,此时控制系统会根据操作者采用的不同制动操作采取不同的控制方式。如果操作者踩下制动踏板直至最低制动时,控制器会根据踩踏角度计算出液压泵和液压马达的控制电流值,推土机车速随控制电流减小而降低,直至速度为零。控制系统认为此时的操作是短时间制动,为了使推土机可以快速响应操作者接下来的驾驶意图,控制系统仅将推土机速度降为零,而不会触发制动电磁阀动作;当操作者将行走控制手柄拨回中位制动时,控制系统认为此操作为非短时间制动,液压泵和液压马达控制电流值会降至最小值,推土机车速会逐渐降低至零。一定时间内,如果控制系统检测不到有其它驾驶操作,制动电磁阀会被立即触发动作,实现整车液压制动。
3)驻车开关急停制动 当操作者拉起驻车拉杆时,控制器输出端口供电被切断,控制器所有控制输出便会被切断,制动电磁阀立即处于制动状态。
以上三种情况在实现制动的同时,控制器还会通过CAN总线将制动电磁阀状态信号发送至显示屏显示,操作者可以直观地了解到设备当前的制动状态。
3 智能安全制动原理
本文提到的静压驱动推土机采用电控发动机,变量液压泵、变量液压马达、电子制动踏板,电子控制手柄、整机智能控制器。如图1所示,控制器接收制动踏板的制动信号及控制手柄的操作信号,并对当前液压泵和液压马达的控制电流状态进行实时检测判断,通过计算后输出液压泵和液压马达的降速曲线、制动信号。
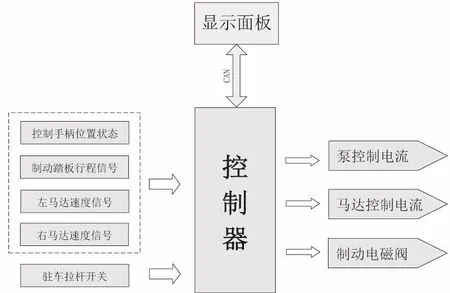
图1 智能安全制动控制原理图
4 智能安全制动方式实现
1)坡道制动 当操作者踩下制动踏板超过90%的行程或行走控制手柄回中位时,控制器会根据踩踏角度或者行走控制手柄位置计算出液压泵和液压马达控制电流的控制值,为了保证降速制动平稳,先将马达控制电流降至零,再将泵控制电流降至零。推土机车速随控制电流减小而降低,直至速度为零。此时控制器通过左右马达上的速度传感器检测马达是否有速度,如果检测到左右两侧的频率值之和大于N(N越小越灵敏),控制系统判定推土机有溜坡现象或有溜坡的趋势,这样控制器输出制动信号,制动电磁阀会立即断电,实现整车液压制动(图2)。

图2 坡道制动控制系统结构原理图
2)非坡道制动 当推土机在平地作业制动或在不足以造成推土机溜坡的缓坡道上作业制动时,控制器检测不到左右两侧马达速度值,此时控制系统会根据操作者采用的不同制动操作,采取不同的控制方式。控制器实时检测行走控制手柄位置、油门踏板踩踏行程,如果操作者踩下制动踏板直至超过90%行程制动时,控制器会根据踩踏角度计算出液压泵和液压马达的控制电流值,推土机车速随控制电流减小而降低,直至速度为零。参见图3。控制系统认为此时的操作是短时间制动,为了使推土机可以快速响应操作者接下来的驾驶意图,控制系统仅将推土机速度降为零,而不会触发制动电磁阀动作;当操作者将行走控制手柄拨回中位制动时,控制系统认为此操作为非短时间制动,液压泵和液压马达控制电流值会降至最小值,推土机车速会逐渐降低至零。在T(T大于泵马达控制电流降至最小值所用时间)时间内,如果控制系统检测不到有其它驾驶操作,制动电磁阀会被立即触发动作,实现整车液压制动。
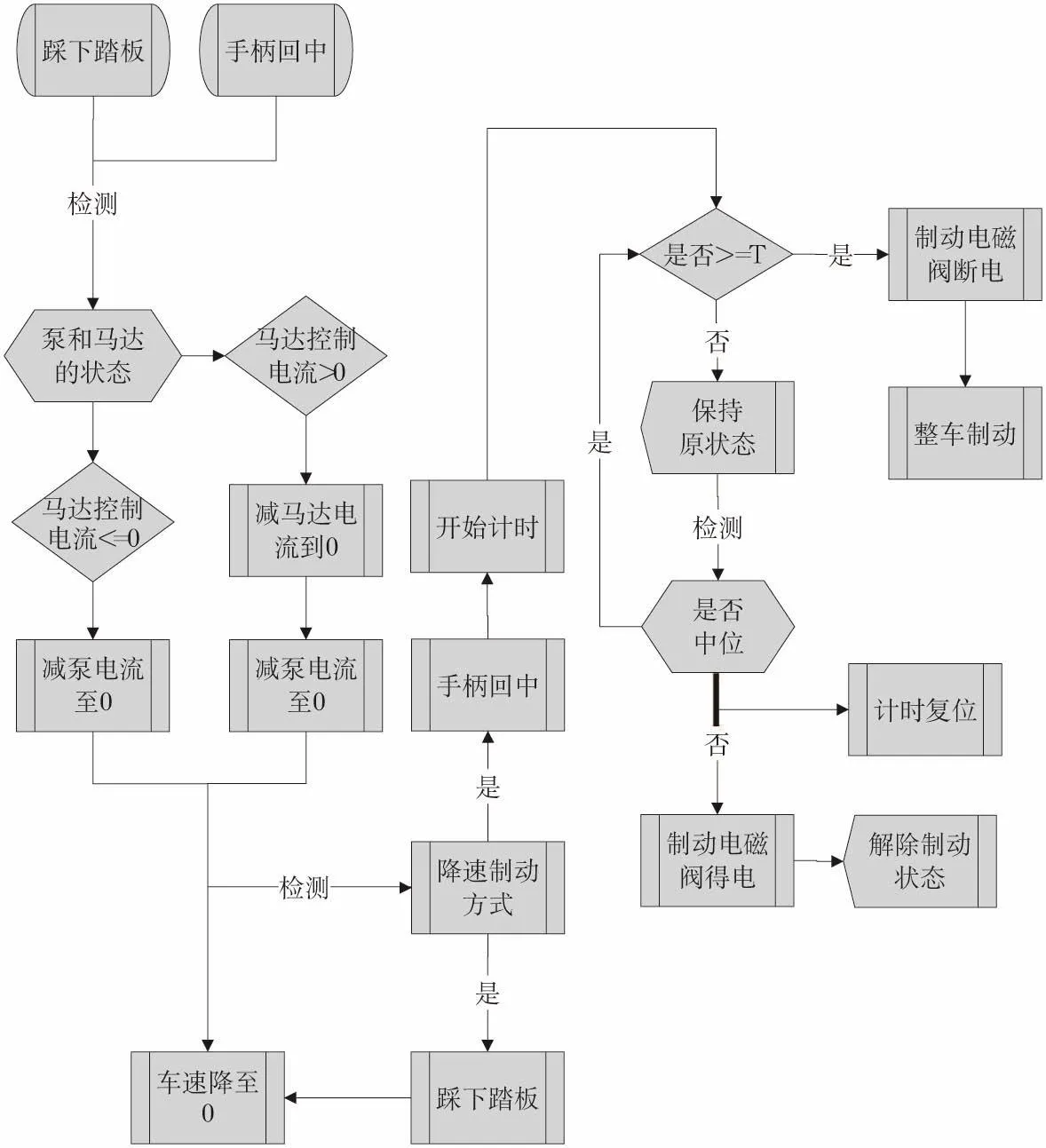
图3 非坡道制动控制系统结构原理图
3)急停制动 当操作者遇到紧急情况或者需要维修检查等特殊情况,而发动机又不能停转,这时必须使推土机绝对制动,以保证维修人员及周边的安全。为此,我们配置了整车驻车拉杆,需要时拉起驻车拉杆,控制器所有控制输出会被切断,这样制动电磁阀立即处于制动状态,整车进入急停状态,无论行走控制手柄或电子油门如何动作,整车都不会响应,达到双重保护的效果。参见图4。
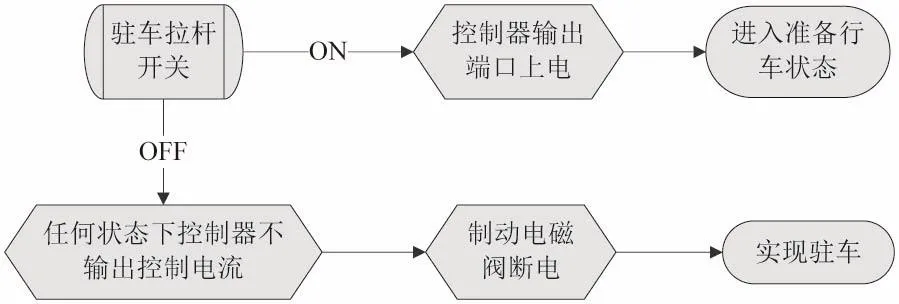
图4 驻车拉杆开关制动结构原理图
5 结 论
本文提出了一种推土机智能安全制动控制方法,可以提高推土机制动时的可靠性及实效性,对制动装置产生的较大冲击得到有效缓解并且可以有效延长其使用寿命,降低故障率;开发的溜坡自动检测功能,提高了推土机制动控制的安全性和可靠性。
