基于加权引导滤波的Retinex刑侦图像增强
2018-12-26刘佳琳刘卫华陈焕平
刘 颖,刘佳琳,刘卫华,陈焕平
(1.西安邮电大学图像与信息处理研究所,陕西 西安 710121;2.西安邮电大学通信与信息工程学院,陕西 西安 710121;3.电子信息现场勘验应用技术公安部重点实验室,陕西 西安 710121;4.陕西省无线通信与信息处理技术国际合作研究中心,陕西 西安 710121;5.山西省长治市92925部队,山西 长治 046011)
在获取刑事侦查(以下简称刑侦)图像时,由于光线、天气等因素的影响,致使拍摄出来的图像质量下降或退化,给后续很多工作带来不便,必须采用图像增强技术对采集的刑侦图像做一定的处理。
常见的图像增强技术有空域图像增强和频域图像增强两类。前者例如直方图均衡化算法[1]和线性变换算法[2],这类算法复杂度低,计算简单,但存在细节信息丢失现象,不符合实际场景。后者最常见的方法为Retinex图像增强算法[3]和小波变换图像增强算法[4],这类算法复杂度高,但是增强效果好,一般能满足人们对图像质量的要求。
在单尺度Retinex(single scale Retinex, SSR)算法和多尺度Retinex(multi-scale Retinex, MSR)算法[5]中,照度分量由图像高斯函数卷积得到,虽能达到增强图像质量的目的,但处理后的图像边缘有明显光晕[6-7];如果采用双边滤波[6]和具有边缘保持特性的引导滤波[7]代替高斯滤波对图像进行增强,可以有效避免Retinex图像增强技术在高光区边界存在的“光晕伪影”问题,但增强后图像色彩出现偏差[8-9];针对增强后图像的颜色偏差问题,后续研究分别提出了一种线性引导滤波的Retinex夜间图像增强算法[8]和基于加权引导滤波的水下图像增强算法[9],这两类算法虽然能还原图像彩色、抑制过增强,但增强后图像的细节丢失[10];文[10]用对数图像处理模型来实现低照度图像增强,该算法可以提高图像亮度和对比度,视觉效果良好,但算法复杂度高,运算时间长[11];文[12]对Retinex算法进行了相应的改进,该算法可以提高图像亮度和对比度,避免光晕现象,但是增强后图像出现少量的噪声,部分细节丢失,整体效果偏差[13]。
为减少增强后图像出现的光晕现象和细节丢失问题,提高刑侦图像质量,本文拟选用自适应权重提高引导滤波的边缘保持特性,进而估计出图像光照分量,并采用对数处理模型对光照分量进行增强,得到准确的反射分量。
1 Retinex理论
Retinex理论[14]是一种基于人眼感知和色度特征的视觉模型,其指出人眼对物体本身的反射能力决定物体的颜色,而入射光的强度对物体颜色影响不大。根据Retinex理论,一幅图像可认为它是入射部分乘以其反射部分得到[14],即图像
I(x,y)=L(x,y)R(x,y)。
(1)
其中,L(x,y)为图像的入射部分,R(x,y)为图像的反射部分。
根据对人类视觉特性的研究,人眼对亮度的变化近似于对数变化模式[14],对公式(1)两边同时取对数,得
logI(x,y)=logL(x,y) + logR(x,y)。
(2)
通过高斯环绕函数与原图像进行卷积,估计出光照分量,用原始图像减去光照分量,即为反射图像,对应的公式[14]为
logR(x,y)=logI(x,y) -
log[L(x,y) ⊗G(x,y)]。
(3)
其中,I(x,y)为原始图像,logR(x,y)为反射图像,“⊗”是卷积运算,G(x,y)是高斯函数,定义为[15]
(4)
其中,λ为使得∬G(x,y)dxdy=1的归一化系数,σ为高斯标准差,也称环绕尺度。
对反射图像取指数,得到最终增强图像[15]
R′(x,y)=exp[logR(x,y)]。
(5)
上述计算过程即为SSR算法,若将不同Retinex算法的输出结果进行加权合并,即为MSR算法,此时的输出图像[15]

(6)
其中,z表示图像R(红)、G(绿)、B(蓝)3个通道,z=1时为灰度图像,z=3时为彩色图像;Wn(n=1,2,…,N)是权重因子,N为尺度总数。
2 基于加权引导滤波的Retinex图像增强算法
由于SSR算法和MSR算法使用不具有保边平滑能力的高斯环绕函数来估计光照图像,致使估计出的光照图像存在一定的偏差。为了更好地估计光照图像,本文选用加权引导滤波取代高斯滤波。
2.1 算法原理
针对经典Retinex算法中存在的颜色偏差问题,采用加权引导滤波的Retinex图像增强算法。算法流程如图1所示。
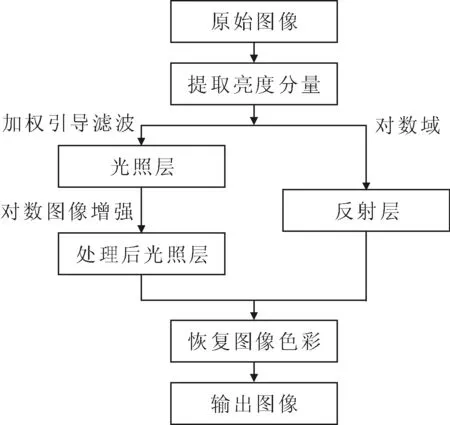
图1 加权引导滤波的Retinex图像增强算法原理
如图1所示,首先,输入一幅低照度刑侦图像,提取其亮度分量;其次,采用加权引导滤波估计出光照层,并用对数图像增强处理模型对光照信息进行增强,得到处理后的光照层;再次,在对数域计算图像的反射层;最后,恢复图像的色彩信息,得到最终输出图像。
2.2 利用加权引导滤波估计光照分量
刑侦图像中的细节信息十分重要,将具有保边平滑特性的引导滤波应用在刑侦图像增强算法中,既可降低噪声干扰又可保留细节。设经过线性转化[7]后,第i个像素处的输出图像
Qi=cjPi+dj, ∀i∈wj。
(7)
式中,Pi为第i个像素处的引导图像;wj为Pi与Qi之间以第j个像素为焦点,半径为r的方形窗;cj和dj是wj中固定的系数。
引导滤波中的所有窗口均采取相同的权重因子,并未考虑窗内像素差异。针对引导滤波应用在刑侦图像中的不足,改进算法采用像素的局部特征来衡量图像质量的好坏和细节信息的丰富程度,从而确定引导滤波的权重。实验中,对于每个像素点(i,j),取其为中心的一个(2k+1)×(2k+1)的正方形窗,统计窗内的方差、均值、梯度等图像特性作为该像素点的特征,继而根据该像素点所属第p次引导输出的局部特征来确定对应的权重,最后按照像素融合的方法对3次引导滤波图像进行融合。图像像素点(i,j)的方差、均值、梯度的计算公式分别为
(8)
(9)

(10)

图像像素点(i,j)的联合质量测度是由上述方差、均值、梯度的一种或多种构成,对应的质量测度
(11)
其中,α,β,γ分别为联合质量测度取方差、均值和梯度时对应的取值。由于图像拍摄特性的差别,使得每幅图像的侧重信息不一样。α,β,γ取值可以为0或1。当α,β,γ其中一项或者两项取值为0时,说明图像的联合质量测度不采用此特性,相反,当α,β,γ其中一项取值或者全部取值为1时,说明此特性占据的权值比较大,采取此特性作为图像的联合质量测度。
权重系数
(12)
其中,Qp(i,j)分别是进行3次引导滤波后图像的质量测度,且权重系数满足0≤wp(i,j)≤1,ξ是一个很小的正数,目的是使分母不为零。则融合后的引导输出图像可由以下公式得出
(13)
其中,G(i,j)为融合后的引导滤波输出图像;Gp(i,j)为3次引导滤波对应的输出图像。
通过上述加权引导滤波取代传统的高斯滤波对光照分量进行估计,这样不仅可反映图像整体情况,而且能够避免传统Retinex算法中带来的“光晕”现象。实验中,将亮度图像Il进行归一化,引导图像与输入图像采取相同的图像,即P=Il,I=Il,将输入图像I和引导图像P作为引导滤波的输入,采用加权引导滤波处理,如下式
Q=fguide(I,P)。
(14)
其中,Q是加权引导滤波后的输出图像;fguide(·)是加权引导滤波操作。
2.3 利用对数处理模型增强光照分量
对数图像处理模型是基于人类视觉系统特性的数学模型[16]。假设图像的2个灰度色调函数分别为f(x,y)和g(x,y),对数图像处理模型中的部分运算公式为

(15)

(16)
(17)
其中,⨁、⊗、⊖分别表示对数图像处理模型下的加法运算、数乘运算和减法运算。M为图像的灰度级总数,对于8 bit图像,令M=255[16]。ζ是大于零的常数,用来放大或缩小图像。
为改善光照分量的质量,获取更准确的反射分量,对加权引导滤波的输出图像采用对数模型进行增强,增强后的图像
f′=c⊗A⨁d(Q⊖A)。
(18)
其中,c和d为常数,A是以(x,y)为中心,n×n为窗口的灰度值的平均值,Q为引导滤波的输出图像,式中c⊗A用于拉伸图像灰度区域的范围,而d(Q⊖A)用于锐化图像的边缘,实验中,c取值为10,d取值为2[17]。
通过以上加权引导滤波器估计出准确的光照分量后,将其转换到对数域,将原始亮度与光照分量相减,可得到相应的反射分量
logR(x,y)=
logIl(x,y) - logf′(x,y)。
(19)
其中,Il(x,y)代表原始亮度图像,f′(x,y)表示处理后的光照分量,进行以上操作后,需要将计算结果代入式(5)中,得到最终的反射分量,再恢复图像颜色,便可计算出最终的增强图像。
3 实验结果及分析
为验证改进算法的有效性,采用Matlab R2016a软件作为编程工具,在Windows 10系统下对SSR算法、MSR算法、直方图均衡化算法、引导滤波算法[7]和本文改进算法分别进行测试,并通过主观评价和客观评价分别对实验仿真结果进行分析。实验选取不同场景下的低照度刑侦图像,如图2 所示。
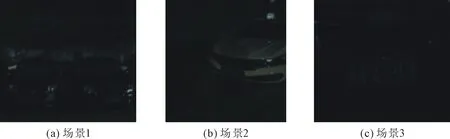
图2 实验测试低照度刑侦图像
3.1 主观评价
对场景1下的低照度刑侦图像,分别利用不同算法进行仿真。不同算法的仿真结果,如图3所示。
从图3可以看出,图3(a)中整体效果较差,图像暗淡不清;图3(b)虽能看见车辆的边缘信息,但是整体颜色偏白,增强后引入较多的噪声;图3(c)和图3(d)虽然能看见车辆整体轮廓,但图像存在一定的噪声;3(e)中图像细节清晰可见,层次感较强,如车灯的边缘部分和车牌号码信息都可清晰地被感知。
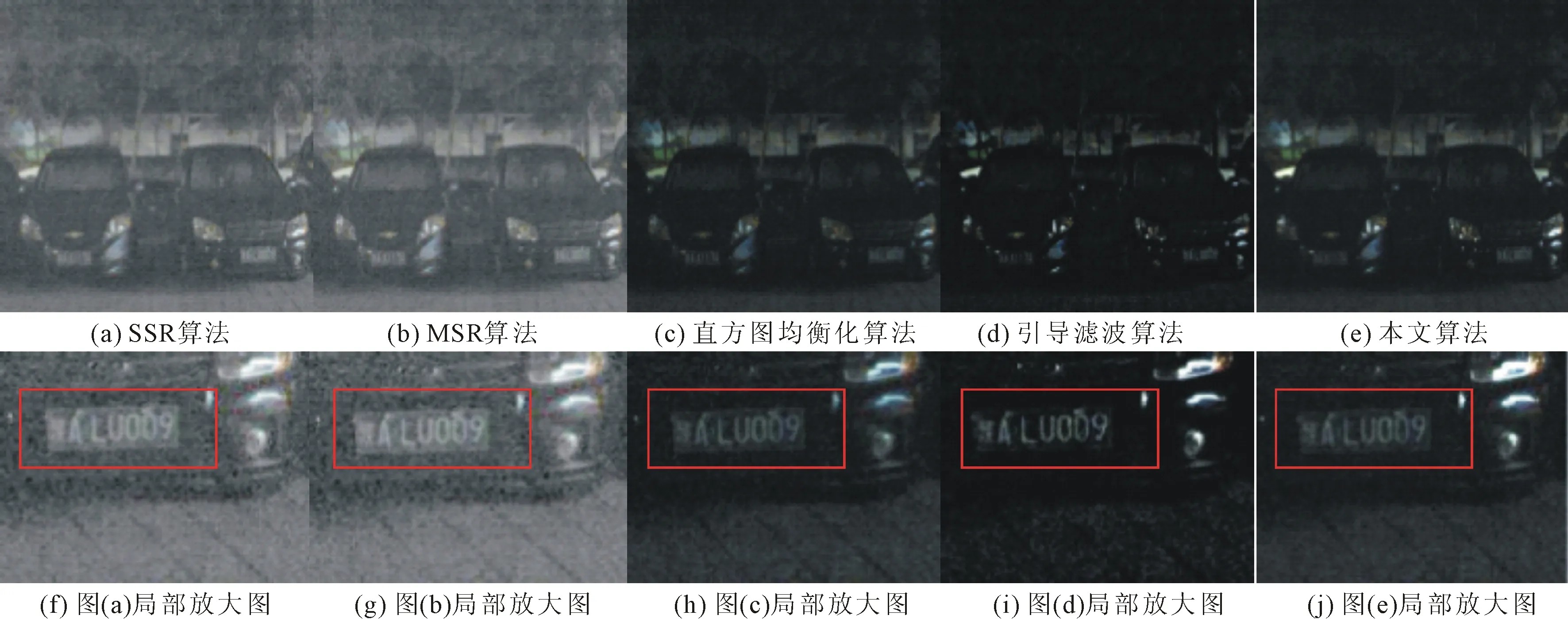
图3 不同算法对场景1的仿真结果
对场景2下的低照度刑侦图像,分别利用不同算法进行仿真。不同算法的仿真结果,如图4所示。
从图4可以看出,图4(a)中图像模糊不清,车牌信息无法被感知;图4(b)中图像颜色出现偏差;图4(c)中虽然图像整体效果较好,但是车牌信息不可清晰地被感知;图4(d)中图像局部信息丢失,不能达到人类视觉要求标准;图4(e)改进算法得到的结果能清楚地看到车身的轮廓,图像整体和局部对比度都较高,增强后图像贴近真实场景。
对场景3下的低照度刑侦图像,分别利用不同算法进行仿真。不同算法的仿真结果,如图5所示。
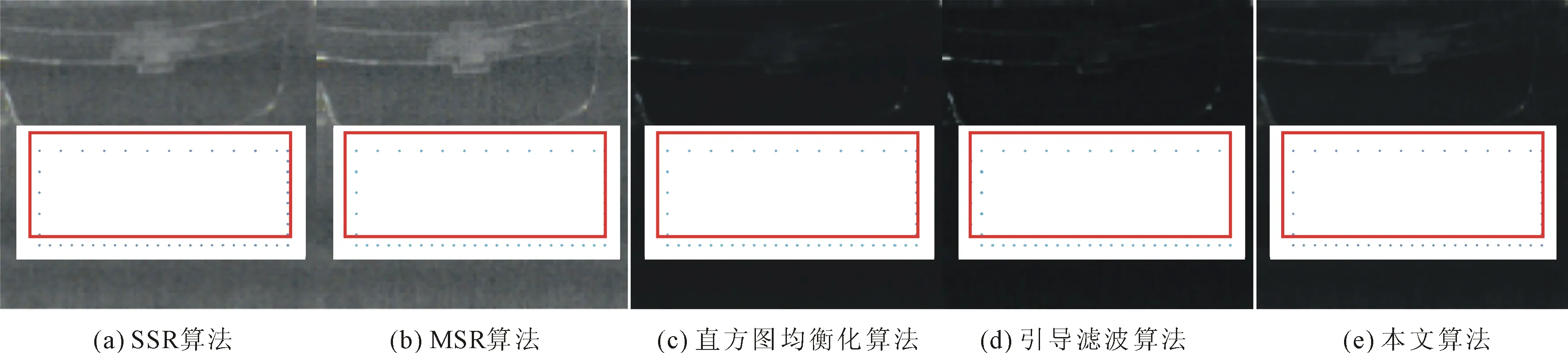
图5 不同算法对场景3的仿真结果
从图5可以看出,SSR算法增强后图像质量模糊,视觉效果差;MSR算法增强后图像存在大量的噪声,图像边缘信息丢失,车牌信息完全看不清;直方图均衡化算法处理的结果图像整体偏暗,车辆信息不能被清晰地感知;引导滤波算法增强后整体效果较好,但引入大量的噪声;本文算法处理后的图像局部细节信息清晰可见,在保证车牌号码被感知的同时,也可以看到车辆头部的轮廓。
通过不同算法对3种不同场景进行测试,可以看出本文算法能够有效避免SSR算法和MSR算法带来的“光晕”现象,相比直方图均衡化算法和引导滤波算法,本文算法能够在一定程度上克服增强图像细节信息丢失和色彩偏差问题,处理后图像局部信息清晰可见。
3.2 客观评价
利用信息熵[9](information entropy, IE)、结构相似性[9](structural similarity index, SSIM)和平均梯度[12](mean gradient, MG)3项评价指标对SSR算法、MSR算法、直方图均衡化算法、引导滤波算法和改进算法的性能进行评估。其中,信息熵可表示图像所含信息量的多少,其值越大,说明图像所含信息成分越高;结构相似性用于表示相邻像素之间的关联程度,进而用来代表图像的结构失真程度,其值越高,说明两者结构相似性越高;平均梯度代表图像细节信息,其值越大,说明图像细节越清楚。
对图2所示的低照度刑侦图像进行测试,不同算法的客观评价结果,如表1所示。
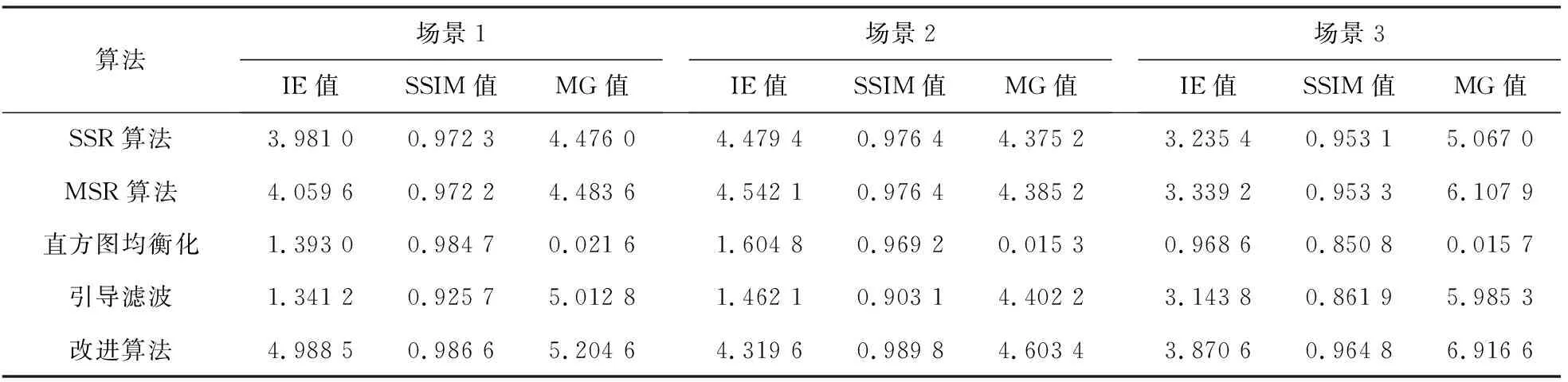
表1 不同算法的客观评价结果
从表1可以看出,由于各个场景的光照、图像纹理和算法本身的差别,致使客观评价指标各有优劣,但改进算法在信息熵、结构相似性和平均梯度上基本都有所提高。
4 结语
针对低照度刑侦图像,提出一种加权引导滤波的Retinex图像增强算法。采用加权引导滤波估计光照分量,并利用对数模型对光照层进行增强,从而得到准确的反射层。实验结果表明,与单尺度Retinex算法、多尺度Retinex算法、直方图均衡化算法和引导滤波算法相比,从主观方面来看,本文算法能够有效避免SSR算法和MSR算法带来的“光晕”现象,相比直方图均衡化算法和引导滤波算法,本文算法能够在一定程度上克服增强图像细节信息丢失和色彩偏差问题,处理后图像局部信息清晰可见;从客观评价方面来看,本文算法的信息熵、结构相似性和平均梯度3个指标都比较高。此外,虽然算法在图像增强方面达到了一定的效果,但针对去除噪声的研究还有待进一步深入。
