室内定位技术综述
2018-12-25彭宏玉刘玉民郝天鹿
彭宏玉,刘玉民,郝天鹿
室内定位技术综述
彭宏玉,刘玉民,郝天鹿
(唐山学院 计算机科学与技术系,河北 唐山 063000;唐山学院 唐山市室内定位技术重点实验室,河北 唐山 063000)
综述了目前典型的室内定位技术,分析了每种典型技术的优点及缺点,同时给出了三角定位法的详细实现原理及推导,从而为室内定位研究系统大范围应用部署提供支持。
物联网;定位;室内定位
定位技术融合了移动技术以及实时方向判断技术[1-2]。定位服务需要借助GIS地图实时获取坐标点感知数据。定位系统通过计算当前位置与信标的距离和角度就可以获得当前位置的具体坐标值[3-4]。近年来,已经有大量的室内定位系统被研发出来[5-7]。本文总结了室内定位系统中惯性导航法、感知探测法、三角测量法以及模式识别法等关键定位技术。
1 惯性导航定位法
惯性导航是室内定位中一种主动定位技术,根据定位物体当前位置预估定位物体下一个位置。当定位物体移动时,惯性导航定位系统通过测程法获取的数据进行聚集运算来预测定位物体的下一个位置。测程法所需数据可以通过传感器例如加速器、磁力传感器、罗盘以及陀螺仪等共同获得[8-10],或者通过定位物体的平均行走速度来获取[11]。定位物体的初始位置,可以通过GPS、RFID标签、或者移动电话定位系统获取[12]。
定位物体位置估算是个递归过程,随着时间的积累,预估的不精确会导致定位误差,定位误差会逐步累积,但是可以通过环境实时信息[13]、RFID标签[14]、超声波信标[15]以及地图匹配技术进行矫正[16,17]。直接定位技术优点在于:只需安装少量的识别器,因此安装费用低廉。
惯性导航法的主要缺点在于:不精确、并且需要和其他定位技术结合使用。如果主动定位系统使用RFID标签对精确度进行矫正,系统将会具有RFID定位系统的所有缺点,包括:架构的变化以及用户需要随身携带RFID阅读器。如果地图匹配或者路标被用来进行错误矫正,那么定位环境的相关信息需要提前准备及存储,而这个准备过程所需费用很高。
2 感知探测定位法
感知探测定位通过事先部署的识别器以及标签感知来确定定位物体的位置。当前有两种感知探测法来确定定位物体的位置:一是将定位信息以及待定位物体相关信息存储在定位标签中;二是将定位信息以及待定位物体相关信息存储在数据库中,使用的时候通过存储在定位标签中唯一标识进行检索。通过标签感知足以定位一个人或者一个物体,而标签读取器可以手持,也可以植入鞋中、或者拐杖中[14]。人或者物体的具体位置可以通过与标签相对位置的变化来计算[15]。按定位标签来划分可以分为5种技术。
2.1 无线射频识别技术
RFID标签是当前室内定位系统中应用最广的一种定位标签。基于RFID技术室内定位系统中的RFID标签可是以主动的[16]、可以是被动的、也可以部分主动、部分被动[17]。主动RFID标签包含电池并且能自主传输信号。由于主动RFID标签具有更大的传输距离,因此可以大大降低为达到定位目的而部署RFID标签的数量。主动标签的缺点是电池需要定期更换。被动标签不需要电池并且通过读取器远程充电进行信号传输。与主动标签相比,被动标签更便宜、传输距离更短、存储空间更小[18]。同时增加了部署费用,因为RFID标签中存储一个ID以及相关定位信息。主动RFID标签中存储空间可以存储128 KB的数据,被动RFID标签存储空间中可以存储不超过128 bytes的数据[19]。通常情况下,RFID标签本身是比较便宜的,但是RFID标签的安装费用比较昂贵,因此这些RFID标签需要安装在地板上或者墙上用来定位人或者物[20]。比如,在进行室内定位部署时,如果需要将RFID标签部署在地板上,当地板上铺有地毯时,部署花费会比较低,当地板的材质是水泥或者大理石时,部署RFID标签的费用会非常高昂。RFID室内定位技术的另外一个缺点是:人体会阻挡射频信号,从而导致定位精度降低[21]。便宜的RFID标签(被动RFID标签)信号传输距离短,因此必须大量部署,如果部署密度不足时,会导致探测不到定位物体[22]。相比之下,主动RFID标签传输距离长,但是必须有源。
2.2 红外技术
基于红外室内定位技术,需要在已知位置安装红外发射器,每一个红外发射器在一个圆锥形区域都会广播一个唯一的ID[23]。定位人或者物体需要携带红外接收器用于在圆锥形信号覆盖区获取红外发射器发射的信号。在典型的红外室内定位系统中,不但广播定位对象的位置信息,而且提供环境相关信息以及图形化移动轨迹信息[24]。红外室内定位相比RFID有一定难度,由于传输角度窄的问题,红外室内定位技术需要瞄准线。红外室内定位技术的缺点在于:自然光以及人造光会对红外室内定位造成干扰[25]。由于通过红外技术进行室内定位时,需要部署大量定位标签,因此安装费用比较昂贵。
2.3 超声波定位技术
超声波室内定位技术需要部署大量的超声波发射器来广播短波超声波。超声波发射器需要事先部署好,并且定位对象需要随身携带超声波接收器。由于接收器接收到最近的两个发射器广播发射来的超声波信号传输时间不同,利用这个不同即可以计算出定位对象的位置。通过发射器与接收器进行超声波交互,可确定定位对象的初始方位[26]。其他的典型超声波室内定位系统是将超声波发生器以及接收器反过来进行部署[27]。超声波室内定位技术的缺点是墙等障碍物会反射或者阻挡超声波信号,这将会导致室内定位精度下降。超声波室内定位技术的另外一个缺点是:在定位时,需要信标(与接收器直接进行对准)。
2.4 蓝牙信标
蓝牙信标也是一种广泛应用于室内定位领域的定位技术。在采用蓝牙信标进行室内定位时,由于蓝牙设备的延迟问题,定位对象移动速度不能太快[28]。蓝牙信标必须是有源的,因此蓝牙信标存在电池续航问题。在基于蓝牙信标室内定位系统运行过程中需要配备电池电量检测系统,主要目的是查看其电池电量。基于蓝牙信标的室内定位的主要缺点是:需要在天花板、墙上、或者地面部署发射器以及接收器,会改变原来的基础设施,增加部署费用。
2.5 条码技术
在基于条形码技术的室内定位系统中,定位对象需要携带一个条形码阅读器。当定位对象需要路径导航时,定位对象需要沿途扫描条形码,基于该定位对象唯一的ID就可以对其进行定位。基于条码技术的室内定位系统可以根据定位对象的ID为其提供定位信息、环境周围信息以及定位对象的移动位置是否正确[29]。基于条码技术的室内定位的优点在于:花费低、容易安装及维护。这种室内定位技术的缺点在于:定位对象需要沿途找到并且通过条码阅读器扫描每一个条码,因此这个过程是繁琐的,容易降低导航速度,并且视觉有障碍的用户可能会难以使用这种室内定位系统。
此外,也有研究者采用多种技术来设计定位信标[30],这些技术包括传感器、罗盘以及粒子滤波技术等。
3 三角测量定位法
采用三角测量法进行室内定位的系统,需要事先安装定位标签,室内定位标签安装后可以进行室内定位、也可以进行室外定位。定位标签可以采用RFID定位标签,也可以是用红外标签或者超声波标签[31]。

图1 三角定位法
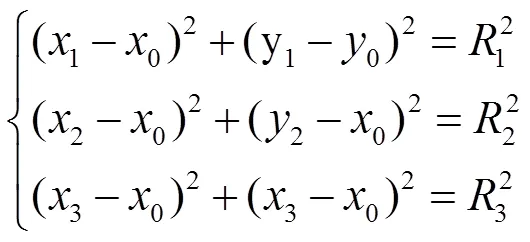

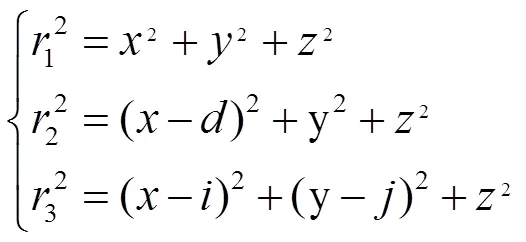
当等于0时,三个球变为三个圆在水平面上相交于一点,由公式(2)可以解出。

将公式(2)中的第一个公式的2代入第二个公式,再与第三个公式一起解出。

由以上可知,在使用三角测量法对一个定位对象进行定位时,需要至少三个已知信标,采用最小二乘法计算三个已知信标点与定位目标的距离来定位目标的位置。系统也可以采用角度测量法计算至少三个新标点与定位目标的角度来确定目标的位置。GPS是目前最典型的基于卫星位置采用三角定位法实现室外定位[32]。使用高精度GPS定位系统可以将定位精度提高到10 cm以内,由于GPS信号是单向的,因此通过GPS系统进行定位时,有利于保护用户的隐私。但在室内或者高层建筑之间会产生信号衰减而使得定位和导航功能失效的问题,这可以借助基站定位法和无线局域网定位法解决。这两种方法由于多波反射问题与GPS系统定位精度相比,定位精度较低[33]。
4 模式识别定位法
基于模式识别的定位算法需要定位目标携带一个或者多个传感器来感知数据,并且要与之前收集的感知数据进行比较。感知数据地图可以通过不同位置的传感器采样来产生。
4.1 计算机视觉
基于计算机视觉的定位技术要求用户携带一架摄像机,或者携带一个手持设备并在该设备上嵌入一台摄像机。在基于计算机视觉的定位系统中,随着用户的移动,摄像机拍照并通过图像匹配来确定用户的位置和方向,以此达到定位目的。基于计算机视觉的定位方法有两个主要缺点。一是需要大量的存储设备存放匹配的图片;二是需要强大计算处理能力来进行图片匹配。因此需要用户佩戴一个较大的设备,这可能会给用户行动带来不便[33]。
4.2 信号或指纹分布
基于信号分布或指纹分布的定位技术需要系统对一个或者多个信号源发来的信号数据与事先存储在数据库中相应的信号数据地图进行比较。这种室内定位系统在定位前需要进行训练。当用户定位时,接收到的定位节点信号强度以及传播时间将会被计算并且与存储在数据库中最近的匹配进行比较。来自无线局域网访问节点的信号强度就是一个基于信号分布定位的例子。无线局域网基站定位的一个特点就是用相对数量比较少的无线局域网基站就可以实现室内人员定位[34]。随着室内环境无线局域网日益普及,已部署基站足够实现室内定位,而不需要投资新建基站来进行室内定位[35]。其他信号分布室内定位技术都是将多种低成本传感器结合起来实现定位,包括加速器、磁力感应器、温湿度传感器以及光照传感器[36]。创建一个包括大量传感器地图是非常耗时间的,而且这个地图可能由于温度光照以及受每天和季节更迭影响导致不可靠。
[1] Xu W, Wang J, Shen H, et al. Indoor Positioning for Multiphotodiode Device Using Visible-Light Communi- cations[J]. IEEE Photonics Journal, 2017, 8(1):1-11.
[2] Davidson P, Piché R. A Survey of Selected Indoor Positioning Methods for Smartphones[J]. IEEE Com- munications Surveys & Tutorials, 2017, 19(2): 1347- 1370.
[3] Xu H, Ding Y, Li P, et al. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K- Nearest Neighbor[J]. Sensors, 2017, 17(8): 1791-1806.
[4] He S, Chan S H G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons[J]. IEEE Communications Surveys & Tutorials, 2017, 18(1):466-490.
[5] Chen X, Zou S. Improved Wi-Fi Indoor Positioning Based on Particle Swarm Optimization[J]. IEEE Sensors Journal, 2017, 99:1-1.
[6] Li Z, Yang A, Lv H, et al. Fusion of visible light indoor positioning and inertial navigation based on particle filter[J]. IEEE Photonics Journal, 2017, 99:1-1.
[7] Rusli M E, Ali M, Jamil N, et al. An Improved Indoor Positioning Algorithm Based on RSSI-Trilateration Technique for Internet of Things (IOT)[C]. International Conference on Computer and Communication Engi- neering: IEEE, 2017: 72-77.
[8] Chen P, Kuang Y, Chen X. A UWB/Improved PDR Integration Algorithm Applied to Dynamic Indoor Positioning for Pedestrians[J]. Sensors, 2017, 17(9): 2051-2065.
[9] Pei L, Liu D H, Qian J C. A Survey of Indoor Positioning Technology and Application[J]. Navigation Positioning & Timing, 2017, 11(9): 65-71.
[10] Ji C, Yuan M, Li R, et al. Indoor positioning based on K-means and the weighted optimized k-NN algorithm [J]. Electronic Measurement Technology, 2018, 16(7): 101-116.
[11] Wang K. Research on indoor positioning algorithm based on Wi Fi and Hidden Markov Model[J]. Computer Era, 2018, 15(5):21-36.
[12] Jingxue B I, Wang Y, Cao H, et al. A Method of WiFi Indoor Positioning Based on Omnidirectional Fingerprint Database[J]. Bulletin of Surveying & Mapping, 2018, 17(11): 35-50.
[13] Nakamura K, Aono Y, Tadokoro Y. A walking navigation system for the blind[J]. Systems & Computers in Japan, 2015, 28(13): 36-45.
[14] Chumkamon S, Tuvaphanthaphiphat P, Keeratiwin- takorn P. A blind navigation system using RFID for indoor environments[C]. Telecommunications and Information Technology: IEEE, 2008: 765-768.
[15] Willis S, Helal S. RFID information grid and wearable computing solution to the problem of wayfinding for the blind user in a campus environment[J]. IEEE International Symposium on Wearable Computers, 2011, 10(7):71-86.
[16] D'Atri E, Medaglia C M, Serbanati A, et al. A system to aid blind people in the mobility: A usability test and its results[C]. International Conference on Systems: IEEE, 2007: 35-35.
[17] Kulyukin V, Gharpure C, Nicholson J, et al. Robot- assisted wayfinding for the visually impaired in structured indoor environments[J]. Autonomous Robots, 2006, 21(1): 29-41.
[18] Ding B, Yuan H, Zang X, et al. The Research on Blind Navigation System Based on RFID[C]. International Conference on Wireless Communications: IEEE, 2007: 2058-2061.
[19] Ni L M, Liu Y, Lau Y C, et al. LANDMARC: Indoor Location Sensing Using Active RFID[C]. IEEE International Conference on Pervasive Computing and Communications: IEEE, 2003:701-710.
[20] Wu N C, Nystrom M A, Lin T R, et al. Challenges to Global RFID Adoption[J]. Technovation, 2006, 26(12): 1317-1323.
[21] Ross D A, Blasch B B. Development of a Wearable Computer Orientation System[J]. Personal & Ubiquitous Computing, 2002, 6(1): 49-63.
[22] Jörg Baus, Wahlster W. A resource-adaptive mobile navigation system[C]. International Conference on Intelligent User Interfaces: DBLP, 2002:15-22.
[23] Tsetsos V, Anagnostopoulos C, Kikiras P, et al. Semantically enriched navigation for indoor environ- ments[J]. International Journal of Web & Grid Services, 2006, 2(4):453-478.
[24] Liu H, Darabi H, Banerjee P, et al. Survey of Wireless Indoor Positioning Techniques and Systems[J]. IEEE Transactions on Systems Man & Cybernetics Part C, 2007, 37(6): 1067-1080.
[25] Ran L, Helal S, Moore S. Drishti: An Integrated Indoor/Outdoor Blind Navigation System and Service [J]. Proc Percom, 2004, 15(8): 23-37.
[26] Priyantha N, Chakraborty A, Balakrishnan H. The Cricket location-support system[C]. International Conference on Mobile Computing and Networking: ACM, 2000: 32-43.
[27] Lorincz K, Welsh M. MoteTrack: a robust, decentralized approach to RF-based location tracking [J]. Personal & Ubiquitous Computing, 2007, 11(6): 489-503.
[28] Huang H, Gartner G, Schmidt M, et al. Smart Environment for Ubiquitous Indoor Navigation[C]. International Conference on New Trends in Infor- mation and Service Science: IEEE, 2009: 176-180.
[29] Hightower J, Borriello G. Location systems for ubiqui- tous computing[J]. Computer, 2001, 34(8): 57-66.
[30] 何静涛,王奎,代文斌,朱舒欢,姚平平.物联网技术在高校图书馆管理中的应用[J].唐山师范学院学报,2016, 38(5):143-145.
[31] 孙晔.京津冀一体化与区域智慧物流的协同发展[J].唐山师范学院学报,2015,37(5):149-152.
[32] 朱程.浅析信任管理在物联网安全中的应用[J].唐山师范学院学报,2015,37(2):52-54.
[33] 刘晓春.加快唐山市物联网发展打造“U唐山”的对策[J].唐山师范学院学报,2011,33(5):98-100.
[34] Chang Y J, Tsai S K, Wang T Y. A context aware handheld wayfinding system for individuals with cognitive impairments[C]. International ACM Sigaccess Conference on Computers and Accessibility: DBLP, 2008:27-34.
[35] Bessho M, Kobayashi S, Koshizuka N, et al. A space-identifying ubiquitous infrastructure and its application for tour-guiding service[C]. Proc. of 2008 ACM symposium on applied computing: ACM, 2008: 1616-1621.
[36] Huang B, Liu N. Mobile Navigation Guide for the Visually Disabled[J]. Transportation Research Record Journal of the Transportation Research Board, 2004, 1885,(1): 28-34.
A Survey of Indoor Positioning Technology
PENG Hong-yu1,2, LIU Yu-min1,2, HAO Tian-lu1,2
(Department of Computer Science and Technology, Tangshan College, Tangshan 063000, China; Tangshan Key Laboratory of Indoor Positioning Technology, Tangshan 063000, China)
Typical outdoor positioning technologies are introduced. The advantages and disadvantages are also summarized. At the same time, the realization of trilateration is introduced so as to promote the extensive deployment of indoor positioning systems.
internet of things; indoor positioning; path plan
TP39
A
1009-9115(2018)06-0082-05
10.3969/j.issn.1009-9115.2018.06.019
博创基金项目(1401801),西南交大合作智慧水务项目(1200305),唐山市科技计划项目(220020502)
2018-07-30
2018-09-19
彭宏玉(1977-),男,满族,河北唐山人,博士,讲师,研究方向为物联网。
(责任编辑、校对:田敬军)