Predictive Tracking Control of Network-Based Agents With Communication Delays
2018-12-24TianyongZhangandGuopingLiuFellowIEEE
Tianyong Zhang and Guoping Liu,Fellow,IEEE
Abstract—This paper investigates the remote tracking control problem of Network-based Agents with communication delays existing in both forward and feedback communication channels.A networked predictive tracking controller is proposed to compensate the negative effects caused by bilateral time-delays in a wireless network.Furthermore,the problem of consecutive data loss in the feedback channel is solved using aforementioned controller,where lateral movement perturbations are introduced.Simulations and experiments are provided for several cases,which verify the realizability and effectiveness of the proposed controller.
I.INTRODUCTION
TELEROBOTIC systems,which are controlled through computer networks have become a popular research topic in recent years due to their potential applications in our daily life[1].In summary,these applications contain unmanned aerial vehicles[2],[3],autonomous underwater vehicles[4],and wheeled mobile robots[5]-[7].
When a communication network is introduced into a control loop of a traditional control system,the design process and stability analysis of the system change,which transforms the traditional control system into a networked control system.The network-induced delay and data packet dropouts in a networked control system will affect the performance of the system and may even make the system unstable[8].Several researchers have made efforts to cope with the time-delay and data loss problem in control loop of networked control system[9]-[14].
In this paper,the remote tracking control problem of a network-based agent is considered.Some closely related and relevant literatures are shown in what follows.In[15],[16],a joystick is used to control a remote mobile robot,and the motion of joystick is translated into desired linear and angular velocities of mobile robot.In[17],a sliding mode approach is proposed to solve the path tracking problem,where an exact discrete time model of mobile robot is developed as a timedelay system.Authors in[18]solve the problem of discrete time tracking control of an omnidirectional mobile robot by extending the continuous time-delay system to a discrete-time model which is free of delay,and the feedback linearization strategy is adopted to obtain the control inputs.In[19],[20],the vehicle active suspension control problem is considered under situation of actuator input delay.In[21],a PD-like controller is applied to the delayed bilateral teleoperation of wheeled robots with force feedback in face of asymmetric and varying-time delays.In[5],[7],[22],predictors are designed to compensate the negative effects of time-delay.Especially in[7],a predictor-controller combination with a remote tracking controller is proposed,whose performance is demonstrated using an interconnected robotic platform located partly in Eindhoven,the Netherlands,and Tokyo,Japan.
To the best of authors’knowledge,this is the first time a remote tracking control problem is solved using networked predictive control scheme.Inspired by[7],this paper adopts a similar tracking controller in discrete-time domain.Following that,a networked predictive control scheme was designed to compensate the negative effects caused by communication delays and data losses.
As the contribution of the current paper,a remote tracking controller based on networked predictive control strategy is proposed,which is capable of compensating for bilateral timedelays in a wireless network.It is worth noting that the simulation and experimental results are consistent.
The remainder of this paper is organized as follows.Section II formulates the problem to be solved.In Section III,the networked predictive tracking controller is proposed.Simulation and experimental results are presented in Section IV.Finally,this paper concludes in Section V.
II.PROBLEMFORMULATION
The network-based agent considered in this paper is a wheeled mobile robot,whose discrete-time model can be described as

and q(k)=[x(k),y(k),θ(k)]Tis defined as state of mobile robot,[x(k),y(k)]represent the coordinates of mobile robot in global coordinate frame,θ(k)denotes the angle between moving direction of mobile robot and X+axis of global coordinate frame,respectively.υ(k)and ω(k)are control inputs of the system,which are also linear and angular velocities of the mobile robot.T is discrete sample time with 0<T<1s.
Supposing that the reference state to be tracked satisfy(1),which behaves as a virtual mobile robot with its state defined by qr(k)=[xr(k),yr(k),θr(k)]T.The positional relationship between reference and real mobile robot is shown in Fig.1.
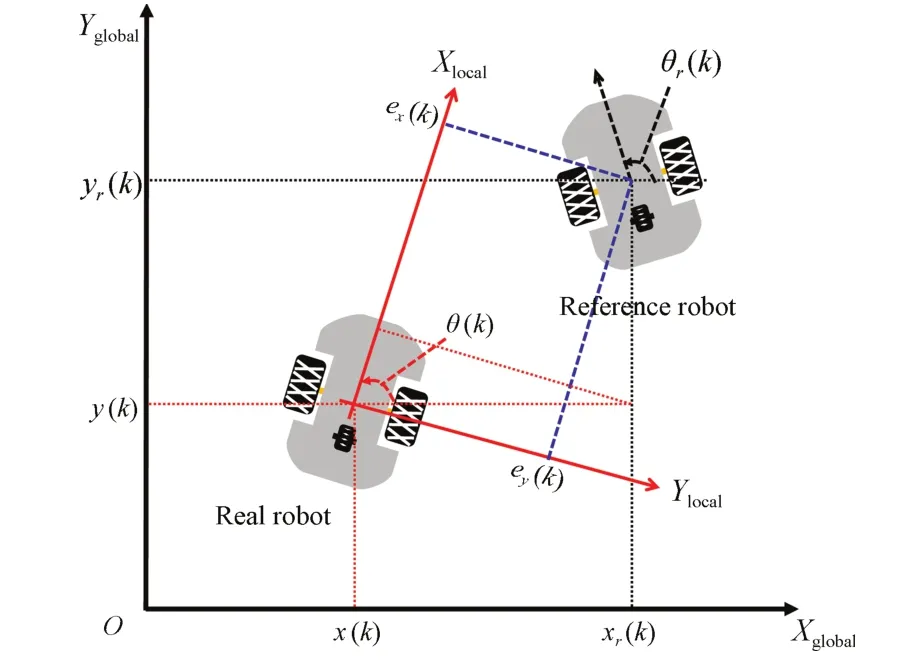
Fig.1.Positional relationship between reference robot and real robot.
The state deviation can be derived as

which is mapped into local coordinate frame of real mobile robot,with

and E(k)=[ex(k),ey(k),eθ(k)]T.Furthermore,it has
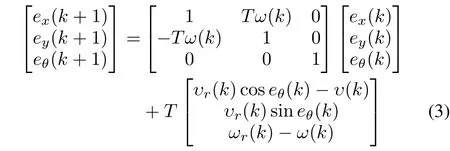
with υr(k)and ωr(k)as linear and angular velocities of reference robot,respectively.To solve the tracking control problem shown in(3),one has to design proper controller to eliminate the state errors,that is,q(k)→qr(k)as k→∞.A tracking controller,which was proposed and examined in[7],in discrete time domain is chosen here.The discrete-time form of this tracking controller is

where kx,kyand kθare positive control parameters,υr(k),ωr(k)are reference inputs,and u(k)=[υ(k) ω(k)]Tare control inputs of mobile robot.Substituting(4)into(3),it gives

with

and

With tracking controller(4)and methods proposed in[23],the closed-loop state error system(5)can be proved to be uniformly globally asymptotically stable(UGAS).When the communication network is introduced into the control loop,especially when network-induced delay exists in the communication channel,the design process of the controller and stability analysis of the system change,which transform the traditional control system into a networked control system.
In the current problem setting,the mobile robot subjects to network-induced bilateral time-delays consisting of a forward and a backward time-delay(see Fig.2).

Fig.2.Schematic of remote tracking control.
In Fig.2,constant time-delays τband τfexist in the feedback and forward communication channels,respectively,where τb,τf∈ (0,τmax),and it is assumed that τmaxis upper bound of time-delay in each channel.While using tracking controller(4),the overshoot of the system increases as the network delay goes up,but the moving trajectory will finally converge to the reference states due to qr(k)-q(k-τb).Whereas,when τband τfare big enough,the moving trajectory cannot converge to the reference states anymore.
To cope with this problem,which also is the control goal of this paper,the state(k+τf|k-τb)and control inputs(k+τf|k-τb)of mobile robot should be predicted based on delayed state q(k- τb)to compensate the time-delay τbin the feedback channel and τfin the forward channel.This implies that(k+τf|k-τb)→qr(k+τf)as k→∞.
III.NETWORKEDPREDICTIVETRACKINGCONTROLLER
As mentioned in Section II,there exists constant time-delays τband τfin the feedback and forward channel,respectively.In networked controller side at step time k,the delayed state q(k-τb)of mobile robot is received,and since control input(k+τf|k-τb)will be sent to mobile robot simultaneously,then the remote tracking problem can be solved.
It should be noted that the future reference states(k+m|k),for m ∈ (1,τf),are used when estimating future control inputs of mobile robot.Based on historical states of qr(k)and reference inputs υr(k),ωr(k),the future reference states can be estimated.To compact the notation,in thesequel it will use ψk/ψ∗,k= ψ(k)/ψ∗(k)for short,where ψ/ψ∗∈ (q,qr,υr,υ,ωr,ω,ex,ey,eθ).
If there are no internal and external uncertainties in(1),the following result is derived on the stability of the closed-loop predictive control system.
Theorem 1:Consider the discrete-time kinematics model of mobile robot(1)with constant time-delays τband τfexisting in feedback and forward communication channels,respectively,in the control loop,where τb,τf∈ (0,τmax).Ifis sent to mobile robot at step time k,then the bilateral time-delays in control loop can be compensated actively,and the stability performance of the closed-loop predictive control system is equivalent to that of(5).
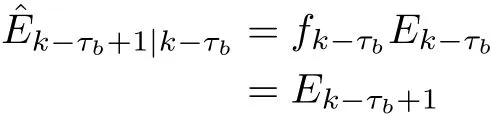
Proof:At stepping time k,the delayed state qk-τbof mobile robot is received,it gives

with

Substitute state deviation(6)into controller(4)gives uk-τb.Since it is assumed that there are no internal and external uncertainties in the system,using system model(1),uk-τband state deviation(6),it can be derived that
where

then the control inputs are calculated as

Similarly,it gives
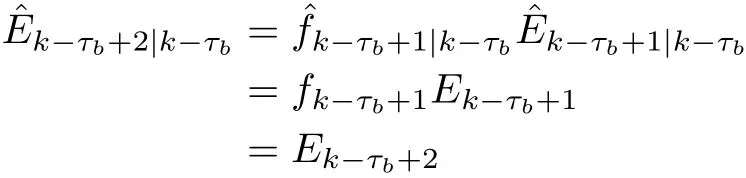
with
Furthermore,we have
with

for s ∈ [2,τb+ τf-1),and the controller is designed as

Let s= τb+ τf-1,it gives
where

After iterations for τb+ τfsteps,the networked predictive tracking controller is obtained as

Replacing k+τfby k+1 in above result,the closed-loop state error system could be described in the following form

with

and the predictive tracking controller at mobile robot side could be described as

We see that the closed-loop state error system in(7)is exactly the same as(5),which implies that the stability performance of(7)is equivalent to that of(5). ¥
Remark 1:In above results,it is assumed that the kinematic model of mobile robot is consistent with its dynamic model,thus it allows us to use networked predictive control scheme to compensate the bilateral time-delays.In real applications,the kinematics models cannot fully describe the dynamic characteristics of the system.In other words,there are errors between the kinematics and dynamics model of mobile robots.As previously mentioned,the value of time-delay determines the iteration times.When using an inaccurate model(kinematics model)to predict future states of mobile robot,the cumulative error will increase rapidly as the iteration times increase.Consequently,the maximum value of time-delay τmaxis determined by the allowable cumulative error between estimated states and actual states of mobile robot.
IV.SIMULATIONS ANDEXPERIMENTS
In this section,the experimental platform is first introduced,then some simulation and experimental results which are obtained using the same parameters are provided to demonstrate the control performance of the proposed networked predictive tracking controller.
The reference trajectory to be tracked is a circular line which satisfies the kinematics model of the mobile robot(1)and has the following form:
the reference circular line is centered at(xrc,yrc) =(0,80)cm with radius r=100cm.Other parameters are given as υr,k=39.27cm/s, ωr,k=0.393rad/s,kx=0.24,ky=0.36,kθ=0.2,with sampling period T=0.1s.
A.Experimental Platform
In general,the experimental platform designed in this paper,as shown in Fig.3,consists of four parts:networked controller,wireless router,vicon system,and mobile robot.
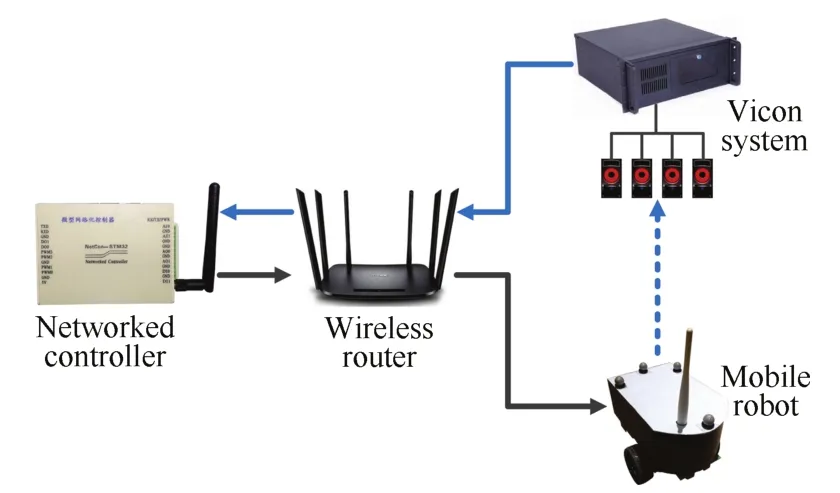
Fig.3.Experimental platform of mobile robot.
The networked controller is designed and developed by authors of this paper.It is capable of executing files which are derived from simulink blocks in MATLAB/Simulink,and it builds a bridge between theoretical research and engineering practice.The hardware resources of the networked controller include two-channel analog to digital converter,two-channel digital to analog converter,two-channel digital input,twochannel digital output and four-channel pulse width modulation.Moreover,the networked controller could communicate with PCs and/or other networked controllers using network send-and-receive modules using UDP protocol.
The mobile robot used in this paper is equipped with two driven wheels,and the wheel is individually actuated by stepper motor.An omni-directional wheel is placed at the back to keep balance.There is an additional networked controller,which plays the role of receiving control inputs,embedded within the mobile robot.
There are four Vicon markers placed on the mobile robot which can be captured by Vicon cameras at each sampling period.After that,the positional information of mobile robot is obtained in the Vicon system,and this positional information will be sent to the networked controller through wireless router.Based on the positional information of mobile robot and the reference states,control inputs of the mobile robot are calculated in the networked controller and transmitted to mobile robot using wireless network.Thus,the closed-loop tracking control system of mobile robot is achieved.
B.Small Time-Delay in Bilateral Communication Channels
In the laboratory environment,the transmition of data packets was achieved by a wireless router,which used UDP protocol.The time-delay was usually small(less than 10ms),and was smaller than one sampling period.When studying the case of time delay being larger than the sampling period,an artificial delay function should be implemented.In this paper,the delay function block in Simulink Library Browse is adopted,which can be used in simulation research and can also be downloaded into the networked controller.
Further more,during the simulation study,the execution time of each individual block was synchronized since PC clock was used,whereas for the experimental part,it is assumed that the execution time of each individual parts were synchronized(due to the time-delay existing in the communication channel is smaller than one sampling period).In other words,time-delays in the bilateral communication channels were introduced on the controller side artificially,thus allowing us to realize a network-induced delay both in simulation and experiment.
In this subsection,small time-delays,e.g. τf= τb=5,exist in the forward and feedback communication channels.The simulation and experimental results are shown in Fig.4,where simulation 1 and experiment 1 are the cases where there is no time delay in the communication channels,and simulation 2/3 and experiment 2/3 are the results that τfand τbexist in the communication channels while using tracking controller(4)and(8),respectively.It can be seen that,when time-delays exist in the control loop,the control performance of controller(8)is better than that of(4),and the results are consistent with that of simulation 1/experiment 1.The tracking errors are bounded within±4cm finally.
C.Large Time-Delay in Bilateral Communication Channels
When the time-delays existing in the communication channels are large enough,e.g., τf=12 and τb=10,tracking controller(4)cannot satisfy the control performance requirements anymore,as shown in Fig.5.Whereas,when using controller(8),the negative effects caused by time-delays are compensated actively,see Fig.6,where simulation 4 and experiment 4 are the results using controller(8)under large time-delays.
Obviously,the moving trajectory of the mobile robot finally converges to the reference states,with tracking errors bounded within±5cm.Consequently,the network-induced delay in bilateral communication channels can be compensated actively.
D.Consecutive Data Losses in the Feedback Channel
When the wireless network is introduced into the control loop of mobile robot,the data packets losses are inevitable due to signal strength and network congestion in wireless router.
Generally speaking,in a real application of mobile robot,data packet drops will happen in two cases.
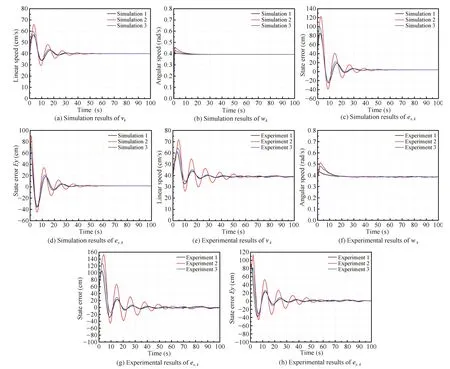
Fig.4.Simulation and experimental results with small time-delay.

Fig.5.Linear speed of mobile robot under large time-delay.
Case 1:The time-delay in the communication channel exceeds the upper bound τmax.Then,the data packet is considered to be lost.
Case 2:If the sensor fails for a finite time period,the state of the mobile robot will never be transmitted to the controller,in which case it is also considered that the data packet is lost.
In both the above cases,the state of the mobile robot is regarded as lost on the controller side.To cope with this problem,the estimated state(k|k-τb)is adopted as q(k).Thus,the issue of data packets lost can be solved.
To simulate data loss and to make the experiment more interesting,the Vicon markers are covered and perturbations are introduced in the experimental process.When the Vicon markers are covered(sensor fails),Vicon system cannot acquire any information about the mobile robot,then a NAN response is sent to networked controller.Hence,the data packets in feedback channel are lost.
The experimental results are shown in Fig.7.It is obvious that the linear and angular speed of the mobile robot converges to the reference speed(see Fig.7(a),Fig.7(b)),and the moving trajectory converges to the reference states within 50s(see Fig.7(d)and Fig.7(e)).At time 55s,a lateral movement perturbation is joined,which could be found clearly in Fig.7(c).When perturbation is introduced into the moving trajectory of mobile robot,state errors ex(k)and ey(k)increase rapidly,which lead directly to the linear speed changes in Fig.7(a).The adjustment time is about 35s when the perturbation is eliminated.From time 95.6s to 111.8s,the Vicon markers are covered,then the positional information is lost in the controller side.Moreover,another lateral movementperturbation is introduced at time 103s.It can be seen that the trajectories of linear/angular speed,positional states and state errors move smoothly until the cover on Vicon markers is removed at time 111.8s,and which will finally converge to the references within 38s,and the ultimate state errors are bounded within±4cm.
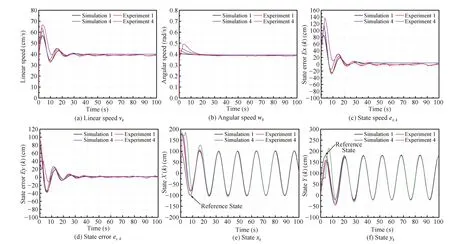
Fig.6.Simulation and experimental results with large time-delay.
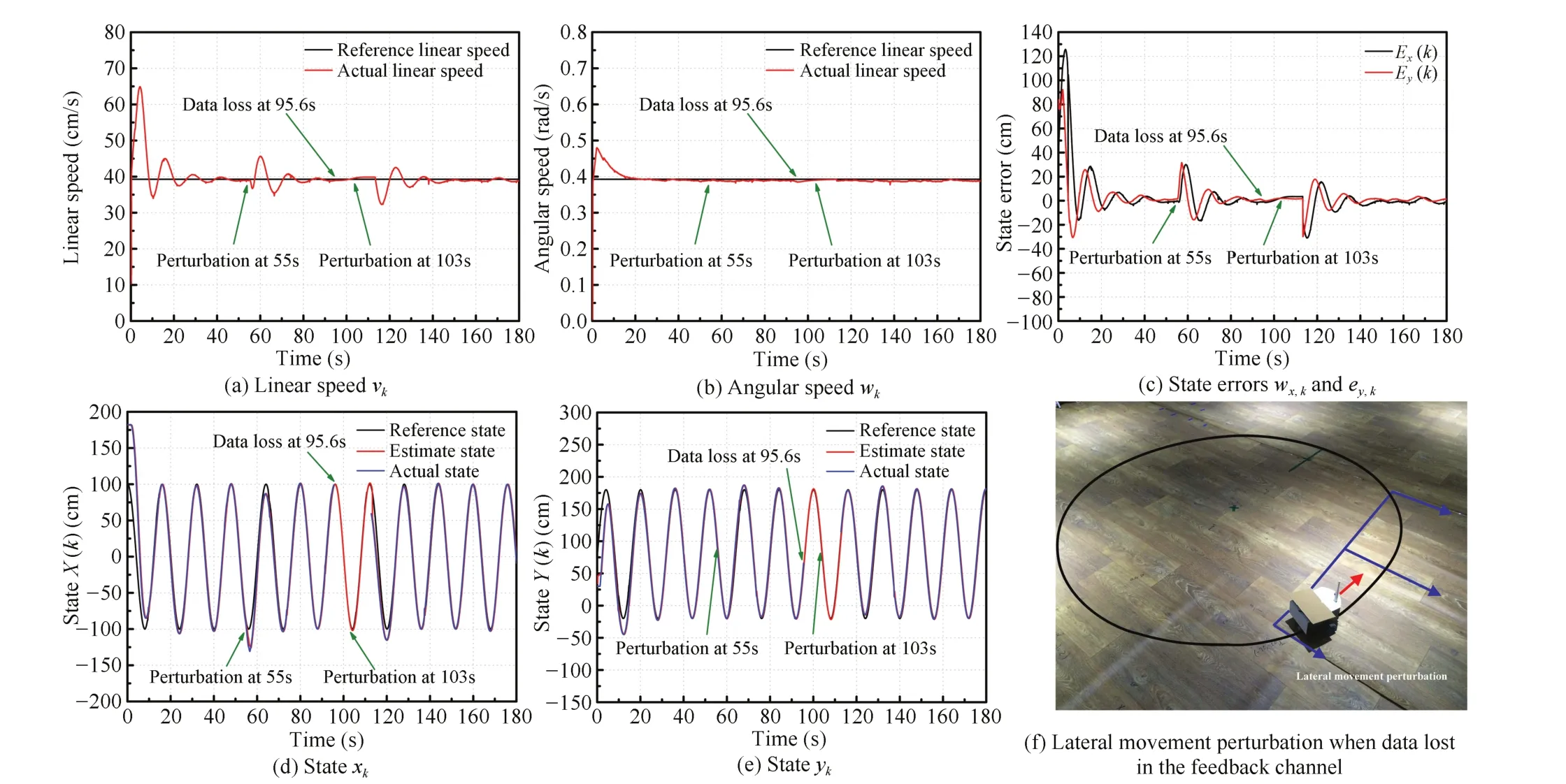
Fig.7.Experimental results with consecutive data loss in the feedback channel.
Based on above results,it can be concluded that the networked predictive tracking controller(8)is capable of compensating consecutive data losses in the feedback channel.Whereas,if a perturbation occurs when the data packets are lost,controller(8)could not eliminate the perturbation until networked controller received the positional information of mobile robot.
In addition,the data loss problem in forward communication channel can be solved by sending a control sequence[,,...,]from networked controller to mobile robot at step time k,where τcmeans the maximum number of consecutive packet loss.If the data packets fromstepping time k+1 to k+τcare lost,then control sequence,...,at mobile robot side are used,which are sent by networker controller at stepping time k.Objectively speaking,this approach will increase the burden on the network,as the size of data packet is greater than that of single data.
V.CONCLUSIONS
In this paper,the remote tracking control problem of a network-based Agent subject to a network-induced bilateral time-delays was considered.The overshoot of system increased as the network delay went up,but the moving trajectory finally converged to the reference states when the timedelays were sufficiently small.Whereas,when time-delays were big enough,the moving trajectory could not converge to the reference states.To solve these problems,a networked predictive tracking control scheme was proposed,which was capable of compensating the bilateral time-delays actively.Simulation results were clearly verified by experiments,which demonstrated the effectiveness of the proposed scheme.Moreover,consecutive data losses in the feedback channel could be compensated actively based on above approach,and it could be obviously seen when lateral movement perturbations were introduced.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Granular Computing for Data Analytics:A Manifesto of Human-Centric Computing
- Speed-assigned Position Tracking Control of SRM With Adaptive Backstepping Control
- The Cubic Trigonometric Automatic Interpolation Spline
- Mathematical Study of A Memory Induced Biochemical System
- Necessary and Sufficient Conditions for Consensus in Third Order Multi-Agent Systems
- Self-Tuning Asynchronous Filter for Linear Gaussian System and Applications