Stabilization of Networked Control Systems Using a Mixed-Mode Based Switched Delay System Method
2018-12-24QingKuiLiMemberIEEEXiaoliLiJiuheWangandShengliDu
Qing-Kui Li,Member,IEEE,Xiaoli Li,Jiuhe Wang,and Shengli Du
Abstract—The phenomenon of mixed-mode is one of the most important characteristics of switched delay systems.If a networked control system(NCS)with network induced delays and packet dropouts(NIDs&PDs)is recast as a switched delay system,it is imperative to consider the effects of mixed-modes in the stability analysis for an NCS.In this paper,with the help of the interpolatory quadrature formula and the average dwell time method,stabilization of NCSs using a mixed-mode based switched delay system method is investigated based on a novel constructed Lyapunov-Krasovskii functional.With the Finsler’s lemma,new exponential stabilizability conditions with less conservativeness are given for the NCS.Finally,an illustrative example is provided to verify the effectiveness of the developed results.
I.INTRODUCTION
W ITH the rapid advancements of network technology,in a number of control engineering applications,sensors and actuators connect with a remote controller over a multipurpose networks,allowing the networks to exchange information among distributed spatial system components.Such systems are well known as networked control system(NCSs)and have gained special interests due to their attractive features such as simple installation and maintenance,increased systemflexibility,higher system testability and resource utilization,lower cost,and reduced weight and power[1]-[8].Typical examples can be seen in a wide range of areas including industrial automation,satellite clusters,traffic control,and mobile robots[9]-[11].Consequently,in the past decades,research on NCSs has attracted considerable attentions in control and network community,e.g.,[12]-[20].Despite the advantages of NCSs,the use of a shared network result in communication constrains due to the inherent limitation of network bandwidth.It is well recognized that network induced delays and packet dropouts(NIDs&PDs)are two important constrains which are the potential causes of performance deterioration or instability of the NCSs[21].How NIDs&PDs affect the stability and performance of NCSs has thus become an important issue.Several methodologies have been developed for modeling,analyzing and synthezing for NCSs in the presence of NIDs&PDs.Some important categories are mentioned for examples as follows:
1)Time delay system methodology models packet dropouts as a kind of delays,which are lumped with network induced delays in the system.Then,the NCS is modeled as a time delay system with mixed delays[22],[23].
2)Stochastic system method holds the property of an NCS that intermittent packet dropouts and network induced delays are random,and is viewed as an important strategy to handle random phenomenon in NCS.One of the stochastic methods uses a linear function of stochastic variable to model random delays,e.g.,[1],[24],or random packet dropouts,e.g.,[21],[25];the other one is to use the Markovian chains to model random delays,e.g.,[26],[27],or random packet dropouts,e.g.,[28],[29].
3)Switched system method provides a powerful tool for modeling of an NCS with time delays and packet dropouts due to the fact that,whether the transmission of a data packet is successful or not,the switching and delay characteristics of the NCS are obvious,and thus,a switched system model can naturally capture the properties of the NCS with time delays and packet dropouts,e.g.,[22],[30]-[32].
In the aforementioned results concerning NCSs with NIDs&PDs,it should be pointed out that a time delay system method mixes the packet dropouts with the delay term,the effects of dropouts are not clearly formulated.On the other hand,a stochastic system method mainly focuses on the discrete system model of NCSs,and more importantly,it is usually assumed that the NIDs&PDs meet certain probability distributions.A switched system method,which has made great advances in the study of the theories and methods[33]-[36],has found a good application for NCSs[22],[30],[31].However,to the best knowledge of authors,existing results concerning NCSs suffering from NIDs&PDs have mainly focused on either delay or switching behaviors[30],[37].The coexistence and interaction of switchings and delays in an NCS due to NIDs&PDs,which leads to a more complicated stability analysis,have not been fully studied[38].The importance of the study of this issue,arises from the natural property of the NCS,and the requirement of performance improvement of the system.This motivates the present study.
As far as a switched delay system is concerned,it usually means a switched system with time delays,where the delay may be contained in the system state,control input or switching signal[39].Distinctive features of switched delay systems are the so called mixed-mode[40],i.e.,when switching occurs,owing to the influence of time delays,both the present subsystem and the previous subsystems determine the state of the switched delay system.Consequently,it is natural to understand that the stability analysis problem for switched delay systems is not easy to handle based on the Lyapunov-Krasovskii functional theory,and there are still more space to improve existing results,e.g.,[38],[40],especially for a switched time-varying delay system with unstable subsystems,which constitutes a major difficulty in dealing with the mixedmodes in time-varying delay case.
As is well known,switched delay systems can model a class of important systems that include switchings and delays,and an NCS can be seen as a typical example.Due to limited bandwidth,NIDs&PDs are viewed as important phenomena,and if we see packet dropouts occurring on an NCS as the switching behavior between the system with,and without packet dropouts,a switched delay system is regarded as a suitable model for real processes involving the NIDs&PDs,see[22],[30],[32],[41].Therefore,stability analysis considering the effect of mixed-modes,from the viewpoint of the switched delay system,should be taken into account for an NCS.Unfortunately,the mixed-modes have not been considered in existing results for the NCSs with switched delay system models,see e.g.[22],[30],[41].
In this paper,stabilization of NCSs using a mixed-mode based switched delay system method is studied.The main contributions of this paper are as follows.Firstly,significantly capturing the properties of NCSs which lead to the controllers switching,an NCS with NIDs&PDs will be modeled as a continuous-time switched linear time-varying delay system.Secondly,when mixed-modes are considered in the stability analysis of NCSs based on the Lyapunov-Krasovskii theory,it is necessary for the corresponding subsystems to decompose the integral interval of the constructed Lyapunov-Krasovskii functional,and the estimation of the integral terms resulted by the processing of Lyapunov-Krasovskii functional is implemented by the interpolatory quadrature formula.Meanwhile,the average dwell time approach is used and the threshold of the delay upper bound which leads to the switching is selected by an optimization technique rather than a pre-specified constant,e.g.[41],[42].Utilizing the Finsler’s Lemma,new exponential stabilizability conditions for NCS with certain tolerated large delay and packet dropout rate are established.Distinctly different from exiting results that concerned with switched strategy for NCSs,e.g.[22],[30],the switched delay system model,and the stabilizability conditions allow the NCS to be unstabilizable during the period of the packet dropouts.Finally,the proposed method is demonstrated by an illustrative example.
Notations:Rndenotes the n dimensional Euclidean space,and for given τ> 0,let Cn=C([-τ,0],Rn)be the Banach space of continuous mapping from([-τ,0],Rn)to Rnwith topology of uniform convergence.Let xt∈Cnbe defined by xt(θ)=x(t+ θ),θ ∈ [-τ,0].‖ ·‖ denotes the usual 2-norm and‖xt‖cl=sup-τ≤θ≤0{‖x(t+θ)‖,‖˙x(t+θ)‖}.The minimum eigenvalue of matrix S is denoted by λmin(S).
II.MODELING OF ANNCSAS ASWITCHEDDELAY SYSTEM
Consider the following linear continuous-time system described by

where x(t)∈Rn,u(t)∈Rpare the state,and the control input,respectively;A,B are constant matrices of appropriate dimensions,and(A,B)is assumed to be stabilizable.
Noted that introducing the network usually leads to the NIDs&PDs[1],[23].This paper assumes that a state feedback controller(realized by a zero-order-hold(ZOH))with piecewise continuous function is applied to synthesize the NCS with NIDs&PDs.The following assumption is given to derive stabilizability conditions.
Assumption 1:The sensor is clock-driven,the controller and actuator are event-driven,and the data is transmitted with a single packet.
In the following,we will model the NCS with NIDs&PDs as a continuous-time switched delay system.
With the state feedback controller,the NCS(1)with NIDs&PDs can be depicted in Fig.1.

Fig.1.Schematic of NCS with NIDs&PDs.
The sampling period is assumed to be a positive constant h,and the sampling instants are denoted as ikh(k=1,2,...).It is assumed that the updating signal which is the signal successfully transmitted from the sampler to the controller and the ZOH,suffers the transmission delays ηk=,whereandare the delays from the sampler to the controller and,from the controller to the ZOH,respectively.Fig.2 shows the timing diagram of signal transmitting in NCS with delays and dropouts.
Now,impose the piecewise linear continuous state feedback control via a network channel.
First,assume that at the sampling instant ikh,the signal can be transmitted successfully from the sensor to the actuator.One can take the state feedback controller as the following formwhere tkis the instant when a packet is successfully transmitted from the sensor.If in the control input introducing the artificial time-varying delay d(t)=t-ikh,taking into account the behavior of the ZOH gives


The network induced delays ηkare assumed to satisfy

where ηmis the upper bound of delays that ensures the stability of NCS with no packet dropout.If ηk> ηm,the NCS may be unstable.This case is viewed as the same of packet dropout.
Second,suppose that the sampling instant ikh is the instant when the signal fails to be transmitted successfully from the sensor to the actuator,and the latest instant when the signal is successful sampled is ikh-l(k)h,where l(k)∈Z+and 0≤l(k)≤L for a constant L>0.Take the state feedback controller as

Furthermore,considering the behavior of the ZOH yields

where ik+jh+ηk+jdenotes the next update instant,j=1,2,....

Fig.2.Diagram of signal transmitting in NCS with delays and dropouts.
When t∈ [ikh+ ηk,ik+1h+ ηk+1),if there is no packet dropout occurring,with the assumption ik+1=ik+1 one can get

Note that the admissible upper bound of network delays satisfy ηk≤ ηm.There is

Remark 1:For an instant τm,once a large delay d(t)≥ τm,the stability of NCS cannot be guaranteed.In this case,no matter whether or not the packet dropout occurs,we all see that the packet dropouts occur on NCS.”Viewing the long delay as packet dropout”can be seen as an active packet dropout strategy,which is convenient to give a switched delay system model for NCS with NIDs&PDs(see in Fig.2).Therefore,τmbecomes the threshold of the switching between the subsystems with packet dropouts and without packet dropouts respectively,and it is the critical upper bound of the timevarying delay d(t)which is closely related to the network induced delay ηk.It is clear that when delay d(t) ≥ τm,the packet dropout of NCS may occur but does not necessarily occur.In the following sections,”the packet dropout”includes both cases of packed dropout and ”large delay”.
By virtue of the technique of controller switching,imposing the controllers(2)and(4)to system(1)gives rise to the following system

Introducing the following notions d1(t)=d(t)and d2(t)=d(t)+l(k)h,the following switched delay system can recast system(7)as

where the right continuous function σ(t):[0,∞) → P={1,2}is the switching signal.σ(t)= 1 if t∈ [ikh+ηk,ik+1h+ ηk+1)or t ∈ [ikh+ ηk,ik+1h+ ηm)which corresponds to the NCS without packet dropout;σ(t)=2 if t∈ [ik+1h+ ηm,ik+jh+ ηk+j)which corresponds to the NCS with packet dropouts.In the following,for convenience,denote tk=ikh+ηk.
For the development of the main results,the upper bound of d2(t)=d(t)+l(k)h is presented as

and obviously,τm≤ τM.
Remark 2:The switched delay system model(8)is capturing the switching property of NCS when packet dropouts or long delays occur.It should be mentioned that in the recent references[41],[42],a switched delay system model in the continuous-time case for NCS has been studied based on an idea of control missing.It is obvious that there are distinct structure differences between the two switched delay system models,and importantly,the switching signal used for the NCS in this paper are generated by the real signal from the NIDs&PDs.
The following definitions are needed.
Definition 1[43]:For any T2> T1≥ 0,let Nσ(T1,T2)denote the number of switching of σ(t)over(T1,T2).If Nσ(T1,T2)≤ N0+holds for Tα> 0,N0≥ 0,then Tαis called average dwell time and N0the chatter bound.
Definition 2:For any T2>T1,let Td(T1,T2)denote the total time interval of packet dropouts during[T1,T2),and the ratiothe packet dropouts rate.
Definition 3:System(1)is said to be exponentially stabilizable under the control law u=u(t),if the solution x(t)of system (1)through(t0,φ)satisfies

for some constants κ ≥ 0 and λ > 0.
To end this section,some useful lemmas are needed.
Lemma 1(Finsler’s Lemma):Let ξ∈ Rn×n, Ξ = ΞT∈Rn×n,and H ∈ Rm×nsuch that rank(H)=r< n,then the following statements are equivalent:
i)ξTΞξ< 0,for all ξ/=0,Hξ=0;
ii)∃X ∈ Rn×msuch that Ξ+XH+HTXT< 0.
Lemma 2:For any constant matrix S ∈ Rn×n,S=ST>0,scalars α>0,0<d(t)≤τ,and vector function˙ω:[-τ,0]→ Rnsuch that the integrations in the following are well defined,then

where υ(t)= ω(t)- ω(t-d(t)).
Proof:Following the same line used in the proof of Lemma 1[44]gives directly this lemma. ¥
III.MAINRESULTS
In this section,a mixed-mode based switched delay system method is used for stabilizing controller design of the NCS with NIDs&PDs.To begin,how the mixed modes affect the stability of the switched delay system will be studied in the Lyapunov-Krasovskii sense.
In order to study the stability of NCS(8),consider the following form of Lyapunov-Krasovskii functional

where χi(i∈ P)are constant coefficients of(t-s),and Piand S are the positive matrices to be designed.Without loss of generality,suppose that σ(t)=i=1,the NCS with no packet dropouts is active,thus χi=-α,χj= β (α,β are positive scalars)and τ1= τm,τ2= τM,i.e.,V1(xt)corresponds to the NCS with no packet dropouts and,V2(xt)the NCS with packet dropouts.We have the following proposition.
Proposition 1:When system(1)suffers packet dropout or large delay,the manifold U(s)=˙xT(s)eβ(t-s)S˙x(s)satisfies

for ζ∈ [t- τi,tk](i=1,2),if the following holds

where q0is an adjustable parameter,and
Proof:See Appendix A. ¥
According to the average dwell time strategy,the switched system guarantees the stability(or the stabilizability)if the proportion rate is relatively small between the total activation time of the unstable(or unstabilizable)subsystems and the one of the stable(or stabilizable)subsystems.The following condition is needed.
The switching signals σ(t)in(10)which are generated by the switchings between the NCS without packet dropouts and the NCS with packet dropouts,are supposed to be satisfied with the following average dropout rate:

where α∗∈ (0,α).
For the convenience of disposal of the mixed-modes for the NCS using a switched delay system mothod,it is helpful to exchange the integral order of the termin(10)and one has

A.Exponential Estimation of the Lyapunov-Krasovskii Functionals
Before developing the stability conditions for the mixedmodes based switched delay systems,a preliminary result is presented.The following lemma is based on the interpolatory quadrature formula(see,e.g.[45]).
Lemma 3:Let

and

when t>tk,we have the following estimation inequalities


Proof:See Appendix B. ¥
With the help of Lemma 3,the following lemma facilitates us to give the exponential decay and increase estimation of Lyapunov-Krasovskii functionals corresponding to the NCS without packet dropouts and,the NCS with packet dropouts,respectively.
Lemma 4:For given positive constants α,β,the derivative of the Lyapunov-Krasovskii functional(14)along the trajectory of system(8)satisfies

when σ(t)=1 and satisfies

when σ(t)=2,if there exist symmetric positive definite matrices Piand S,matrix K,any free weighting matrices Xi,Yi,Zi(i=1,2)with appropriate dimensions,and positive constants τm,τMsuch that the following optimization problem:is solvable,where
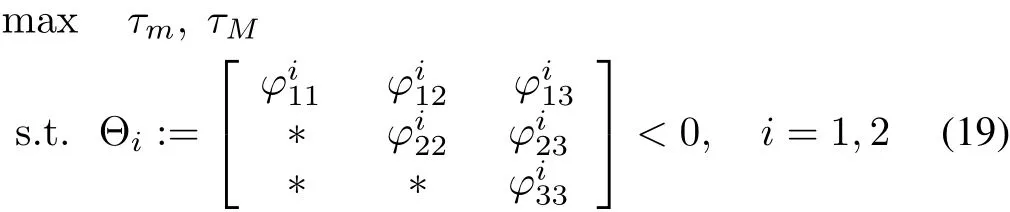
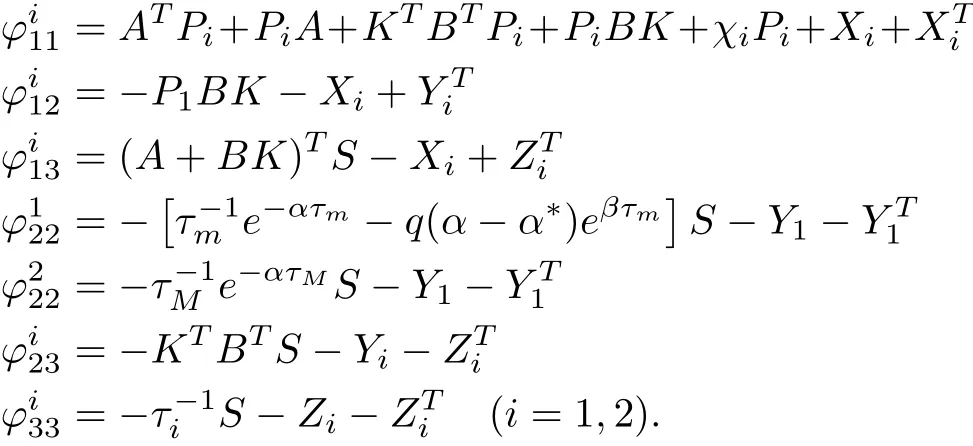
Proof:See Appendix C. ¥
Remark 3:In order to deal with the mixed-modes based stability analysis for NCS with NIDs&PDs,the interpolatory quadrature formula is key to deriving the exponential decay or increase estimation conditions for the Lyapunov-Krasovskii functionals.It should be noted that simple bounding techniques may not give the available solution of the problem addressed.
Remark 4:By the introduction of the Finsler’s lemma,the solvability problem of˙Vi(xt)+αVi(xt)≤ξT(t)Ξiξ(t)<0 is converted to the solvability problem of inequalities(19).The merit of this scheme lies in that the matrices in the Lyapunov functional and the control gains which are to be determined are decoupled.On the other hand,since some free weighting matrices can be selected,the flexibility of solving inequalities(19)is increased,and thus the conservativeness of the conditions(19)is decreased accordingly.
We are now in a position to give the stabilization conditions for the NCS with NIDs&PDs.
Theorem 1:For given positive constants α,β,q,if there exist symmetric positive definite matrices Piand S,matrices K,any free weighting matrices Xi,Yi,Zi,Ti,Mi,Ni(i=1,2)with appropriate dimensions,and positive constants τm,τMsuch that(12)and(9)are satisfied,the system(1)with NIDs&PDs is exponentially stabilizable under the switching signal σ(t)which orchestrates the switchings between the system without packet dropout and with packet dropouts,and satisfies the following conditions:
i)the average dwell time is satisfied with


in which P1and P2are defined in Lemma 4;
ii)the packet dropouts rate meets(3).
Proof:The proof is similar to the one in[38],and thus is omitted. ¥
Remark 5:By using the switched delay system method,an NCS with NIDs&PDs can be modeled as a switched delay system with both stable and unstable subsystems,which extremely extends the delay upper bound for an NCS.Note that the large delay case has been viewed as packet dropout,so the packet dropouts rate can be depicted as the occurrence frequency of the unstable subsystem,i.e.,we can obtain the packet dropouts rate by(13)and the optimal solutions of(12)and(19).
Now,we present the procedure to get the maximum packet dropouts rate Δd.
Step 1:Preset the values of positive constants α,β,solve inequality(19)to get the feasible solutions of τmand τM.
Step 2:Bidirectionally adjust the constants α,β to obtain the optimal solution of q0according to(12),and then to get the optimal solutions of τmand τM.
Step 3:Select an appropriate parameter α∗to get the maximum packet dropouts rate according to(13),such that the NCS can be stabilizable.
Remark 6:The delay upper bounds τm,τM,which we obtained by the optimal techniques,are different from existing results which are given as constants for the NCSs,see[23],[41],[42]for instance.Most importantly,the key point τmwe derived is the threshold of the switching between the NCS with packet dropouts and that without packet dropout.
Remark 7:Literally,the main results obtained in this paper are similar to those of[19]due to that the switchings,networked delays,the “mixed”properties and the average switching techniques are studied in both papers.However,compared with[19],stability analysis of NCSs considering of the coexistence and interaction of switchings and delays,i.e.,the effect of mixed-mode,is the obvious the main task of this paper.
IV.ANILLUSTRATIVEE XAMPLE
In this section,a numerical example is introduced to demonstrate the mixed-mode based switched delay system method for NCS with NIDs&PDs.
Consider the same NCS(1)as in[38],where

It is obvious that the open-loop system is not stable.
With the networked control scheme,we can model the following switched delay system

By the mixed-mode based switching delay system method proposed in this paper,we can obtain the critical delay bound τm=1.03 and the admissible upper bounds of the delay τM=1.66.The control gain

and the Lyapunov-Krasovskii functional(14)with

and

are calculated with the MATLAB LMI control Toolbox based on conditions(19).
Note that,though the effect of the mixed-mode of the delays and dropouts is considered,by introducing the Finsler’s lemma to deal with the network induced delays and dropouts,we can still establish the conditions of less conservativeness,whichenables us to get larger critical delay bound τmand admissible delay bound τMthan existing results.Table I presents the relative results by comparison.
By selecting the parameters α =0.4320,β =0.6201,we can getµ=1.3553 and=4.3312 according to condition(ii)of Theorem 1 with the optimization algorithm,and the maximum packet dropouts ratio△d→0.0475(Tα→∞)can be calculated.Due to Finsler’s lemma being adopted,more free weighting matrices facilitate us to get less conservative results than existing ones,e.g.[38],[41].Table II gives the comparison of the influences of the delay bounds τm,τMtoµand the dropouts rate△d.

TABLE I THECRITICALDELAYBOUNDτmAND THEADMISSIBLEDELAY BOUNDτMOBTAINED BYDIFFERENTMETHODS
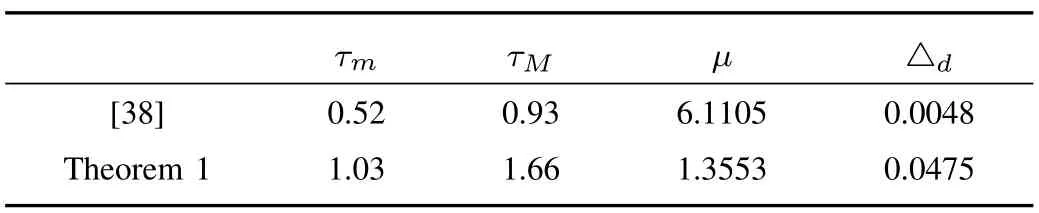
TABLE II COMPARISON OFINFLUENCES OFCRITICALDELAYBOUNDτm AND THEADMISSIBLEDELAYBOUND τMTO µ,THEDROPOUTS RATE△d
We simulate the network environment such that the NIDs&PDs satisfy the conditions of Theorem 1.By selecting the initial state as x1(0)=-0.1 and x2(0)=0.1,Fig.3 presents the switching signal generated by the delays and packet dropouts.Satisfactory simulation results of the control input and the state response are illustrated in Figs.4 and 5,respectively.

Fig.3.The switching signal resulted by the packet dropouts.

Fig.4.The control input.
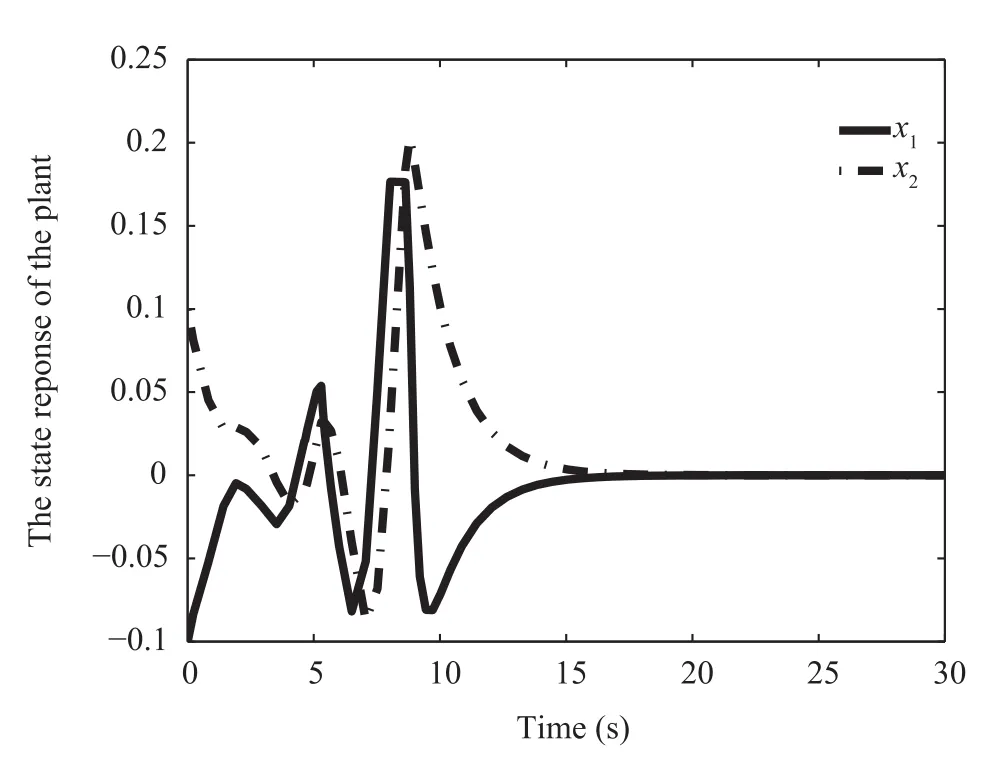
Fig.5.The state response of NCS with NIDs&PDs.
V.CONCLUSION
This paper addressed the modeling of NCS with network induced delays and packet dropouts as a continuous-time switched linear delay system.The effect of mixed-mode to the stability analysis,from the viewpoint of a switched delay system,was investigated for NCSs based on a novel constructed Lyapunov-Krasovskii functional,and Newton-Cotes quadrature formula was taken into account for the decay rate estimation of the switched Lyapunov Krasovskii functional.With the help of the Finsler’s lemma,new exponential stabilizability conditions with less conservativeness were given for NCSs.Finally,an example was given to illustrate the effectiveness of the developed results.Issues of the stabilization problem for NCSs using the mixed-mode based switching delay system method with more general Lyapunov functionals,or for NCSs with multiple packets transmission and other communication constraints,are interesting and challenging,and thus deserve further investigation in the future.
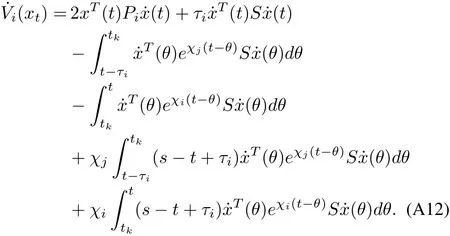
APPENDIXA PROOF OFPROPOSITION1
Consider the derivative of U(s)with respect to s.For this purpose,let z(s)=˙x(s),and then U(s)=zT(s)eβ(t-s)Sz(s).
For t∈ [ik+1h+ηm,ik+jh+ ηk+j)which corresponds to the packet dropout,differentiating both sides of(8)yields

Note that the sawtooth structure of the artificial delays,i.e.,d2(t)=t-+l(k)h and(t)=1 seen almost anywhere.System(A1)reduces to

Fixing t as a parameter,and taking derivative of U(s)with respect to s along system(A1)yield

The conditions of(12)help us to get(s)≥-q0‖z(s)‖2.Noticing that‖ z(s)‖2≤,we can further obtain

Integrating(A4)from ζ∈ [t- τi,tk]to t gives ln,which leads to

APPENDIXB PROOF OFLEMMA3
Consider the Newton-Cotes quadrature formula[45].
i)Note that inequality(15)is equivalent to the following inequality

If(A6)can be guaranteed,the proof is finished.Now,consider the left hand of(A6).According to the integral mean value theory,there exist ξ1∈ [t- τ,tk]and ξ2∈ [tk,t],such that
and

Noticing that t-τ≤ ξ1≤ tk≤ ξ2≤ t,and considering condition(A5)gives

ii)Considering the integral transformation for W2(t)withone can obtain
Note that when x ∈ [t-τm,t],0< τm< τM,there has
Note that U2(s)≤ e(α+β)τMU1(s),inequality(A7)holds.
APPENDIXC PROOF OFLEMMA4
Firstly,we consider the following decomposition of the Lyapunov-Krasovskii functional(14).Suppose that system(8)is in the ith mode for t∈[tk,tk+1),and the ith subsystem was activated from the jth subsystem at t=tk,it is also assumed that(t-τi)∈ [tk-1,tk).When t∈ [tk,tk+τi)it follows from(14)that
and when t∈ [tk+τi,tk+1)

We will discuss the derivatives of the Lyapunov-Krasovskii functionals in two cases,i.e.,tk+1-tk≤ τiand tk+1-tk> τi.
Case 1:tk+1-tk≤ τi.
Note that in this case,the mixed-mode may cover the whole switching interval[tk,tk+1).Thus,for t∈[tk,tk+1),differentiating the Lyapunov-Krasovskii functional(14)along the trajectory of system(8)gives
If it is assumed that σ(t)=i=1,thus χi=-α,χj= β and τ1= τm,τ2= τM.Therefore
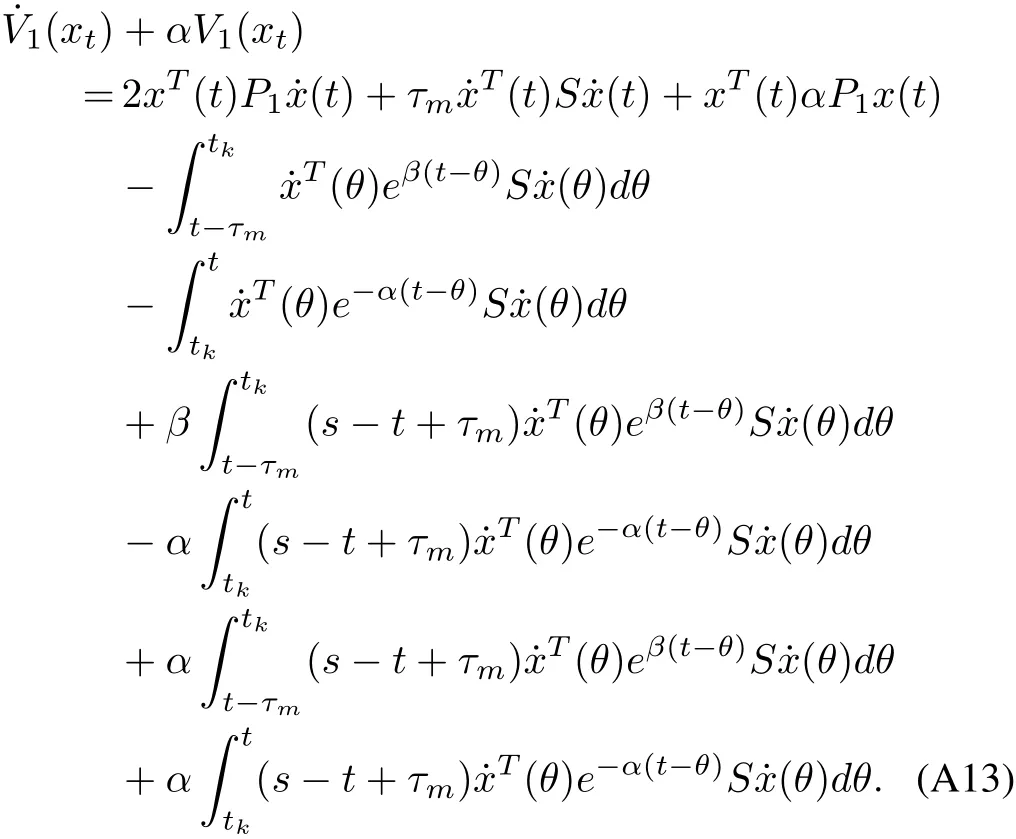
Considering the effect of the mixed-mode,during[tτm,tk),the 2nd subsystem is active.With the estimation inequality(15)in Lemma 3 and the average activation rate(13),we have

and it is obvious that
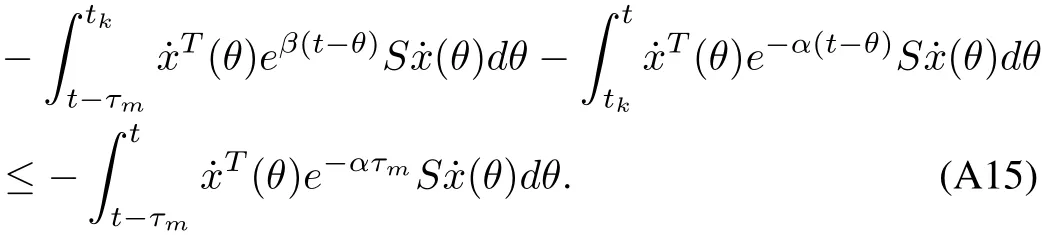
Substituting(A14)and(A15)into(A13)gives rise to

Note that 0< d1(t)≤ τm.Lemma 2 facilitates us to obtain

Let ξ(t)=[xT(t), xT(t-d1(t)), υT(t)]T,and then it can be concluded that

where

with
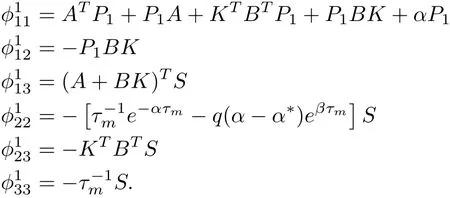
Note that,on the other hand,when σ(t)=1,inequality(19)can be rewritten as follows

where

Obviously,Hξ(t)=0.According to Finsler’s lemma,there is ξT(t)Ξ1ξ(t)<0,which implies(xt)+αV1(xt)≤0 and

holds apparently.
Case 2:tk+1-tk> τi.
In this case,two subintervals:[tk,tk+ τi)and[tk+ τi,t)are considered.For t∈ [tk,tk+τi),the analysis is the same as in Case 1.For t∈ [tk+ τi,t),Vi(xt)is given by(32).
Note that no time interval decomposition of the integral is needed.When i=1,condition(19)must be satisfied with this case,so the proof is omitted.
Similarly,it is easy to obtain V2(xt)≤ eβ(t-t0)V2(xt0)with the same procedure above.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Granular Computing for Data Analytics:A Manifesto of Human-Centric Computing
- The Cubic Trigonometric Automatic Interpolation Spline
- Mathematical Study of A Memory Induced Biochemical System
- Predictive Tracking Control of Network-Based Agents With Communication Delays
- Necessary and Sufficient Conditions for Consensus in Third Order Multi-Agent Systems
- Self-Tuning Asynchronous Filter for Linear Gaussian System and Applications