智能手表室内定位技术简析
2018-12-23邬治平
徐 伟,杨 丽,钟 飞,邬治平
(依波精品(深圳)有限公司,广东 深圳 518107)
智能手表室内定位技术简析
徐 伟,杨 丽,钟 飞,邬治平
(依波精品(深圳)有限公司,广东 深圳 518107)
随着全球导航卫星系统(GNSS)的发展,位置服务日益成为人们生活、工作当中不可缺少的一部分。与此同时,可穿戴设备的兴起,促使对位置服务的需求进一步提高,尤其是智能手表,监护人随时掌握儿童、老人的位置信息,就显得至关重要。众多拥有定位功能的智能手表,其GPS定位模块已基本满足用户对室外定位的要求,但是室内智能手表的定位精度仍不尽人意。因此,探讨智能手表的室内定位技术是很有必要的。
智能手表;室内定位技术;WPS定位;惯性导航技术
1 定位技术原理
目前的定位原理大致上分为4种,分别是邻近信息法、场景分析法、几何特征定位法和惯性导航定位技术[2]。邻近信息法是根据信号的作用范围,大致定位信号源的位置;场景分析法需要事先知道场景位置的特征数据,对待测位置回传信号进行匹配,从而得出位置;几何特征定位法主要有三边定位、三角定位和双曲线定位;惯性导航定位技术,以牛顿力学理论为基础,通过传感器测得人体的运动参数(比如加速度、步长步数等),经过计算实现对人体的实时定位。
最常见的测距方法包括基于信号到达时间(TOA)的方法、基于信号到达时间差(TDOA)的方法、基于信号到达角度(AOA)的方法和基于信号强度(RSS)的方法[3]。
1.1 TOA定位
TOA(Time Of Arrival)定位就是测量出3个或者多个基站和移动端之间的信号(电磁波)传播时间,从而得到3个或多个基站到移动端距离的估计值。TOA方程组有:

式(1)中:(x0,y0)为移动端位置坐标;(xi,yi)为基站i位置坐标;i为第i个基站;c为电磁波传播速度(光速);ti为电磁波传播时间。
图1为TOA定位原理图。
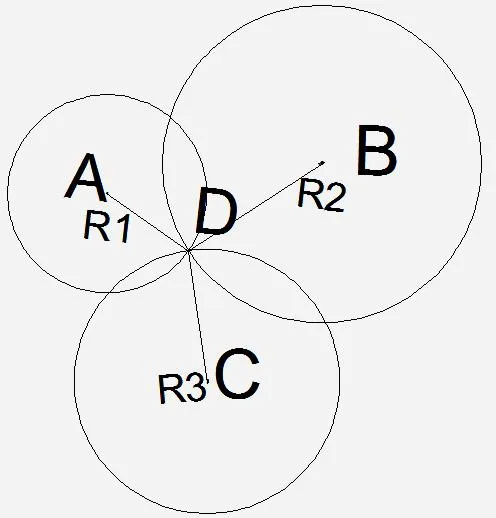
图1 TOA定位原理图
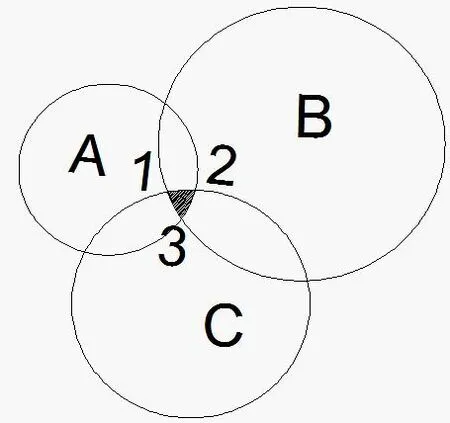
图2 一种无解情形
在TOA定位原理图中,D点作为移动端位置,在具备了3个基站位置后,就能联立方程组,求得移动端具体的位置坐标。但是,当A,B,C3个圆不存在交于一点的情况时,将会导致上述方程组(1)无解,图2显示的是较为特殊的一种无解情况,通过估算能得到移动端的具体位置坐标。
此时的估算结果为所围区域(阴影)的预估值。其方法是:选取圆B和圆C的2个交点中离圆A近的点,确定点1,同理可以确定点2、点3.此时,点D的估算位置为:

其他无解情况,参照类似解法,进行移动端位置的估算。从TOA定位技术的计算原理可以看到,各个基站和移动端在接收信号时间上需要同步,任何很小的时间误差将会被放大很多倍,又由于多径效应影响带来的误差,单纯的TOA定位技术在实际中应用很少。
1.2 TDOA定位
TDOA(Time Difference Of Arrival)定位技术是对TOA定位的改进,将基站和移动端的信号传播时间t1,t2,t3两两做差,基站和移动端之间构建一个“测距差系统”。基站位置确定后,在二维空间中,移动端到2个基站之间的距离差为常数的轨迹,即为一对曲线,因此TDOA定位系统也被称作“双曲线系统”。

通过这一公式可知,这里以基站间的距离作为焦距,基站作为交点,建立双曲线方程,此时移动端的位置就在曲线上。在多个基站情形下,得到的多条双曲线和TOA类似,移动端位置坐标就是这些曲线的交点。
由于TDOA定位技术通过测得基站间的距离,会抵消掉信号在传递过程中的时间误差和多径效应带来的误差,因此相对于TOA来说,精度有很大的提高,更具实用性。
1.3 AOA定位
AOA(Angle OfArrival)定位是一种两基站无线定位方法,基于信号的入射角进行定位,是一种典型的测角系统。
图3为AOA定位技术原理图。
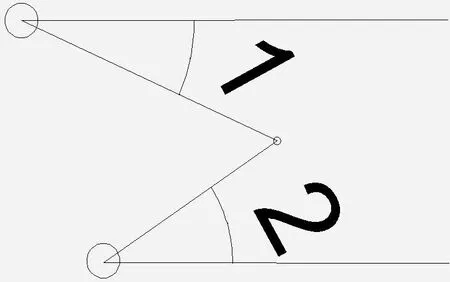
图3AOA定位技术原理图
如图3所示,基站和移动端连线,基站和移动端连接的射线形成2个夹角,即夹角1和夹角2,2条射线的交点就是移动端的位置。此时有:

式(3)中:i为基站个数,在此i取1,2.
AOA通过两线相交定位,具有唯一性,对于信号接收角度有很高的要求,必须配备方向性很强的天线阵列。当移动端距离基站较远时,基站定位角度的微小偏差会导致较大误差。
1.4 RSS定位
在RSS定位技术中,利用无线信号在传播过程中的衰减,从接收信号强度中推算出定位距离[4],假定信号强度是信号发射端和接收端距离的一元函数,信号强度和距离的理想函数关系为:

式(4)中:P(r)为接收端的信号功率;r为信号发射接收端间距离;P(r0)为发射端信号功率;α为路径损耗随着距离r的增加而增加的速率。
在实际运用中,需要考虑建筑物墙壁对信号传递的干扰。一种关于信号强度的经验公式模型,考虑了信号传递中墙壁对信号轻度的衰减作用。

式(5)中:n为信号传递中穿过的隔墙数;WAF为隔墙衰减因子。
很明显,RSS定位技术无需复杂的时钟同步,但由于信道的快速衰落和无线信号传输环境的变化,即使接收端和发送端都不移动,也可能出现严重的震荡;信号在非直径路径上的衰减要大于直线路径上的衰减,计算得到的路径就要比实际的路径长,这样定位就会产生很大的误差[5]。
2 智能手表室内定位技术
2.1 基于WIFI的定位系统
随着WIFI网络的盛行,越来越多的智能手表品牌(比如苹果、三星、华为)也推出了可接入WIFI连接模块的智能手表,实现了智能手表上APP的应用和运行。基于WIFI定位系统(WPS,WIFI-Based Positioning System),WIFI用户将终端网卡主动扫描或被动监听其接收范围内各个WIFI的信道接入点(AP,Access Point)的信号,通过监听扫描所接收到的数据帧中的MAC地址和SSID来辨识所有AP,并收集记录其相应的数据。WIFI信号发射设备作为一个无线接入点,意味着实现了全球一个位置的一个唯一ID。对于一个空间位置来说,AP的ID越多,定位也就会越准确。AP采集并建立数据库,采集的点越多,定位也就越准确。
2.2 基于蓝牙低功耗定位
蓝牙(Buletooth)是一种设备间短距离无线通信技术,最新的蓝牙4.0通讯距离达到了100 m,这为智能手表室内定位提供了更大的技术空间,定位精度也能相应地得到提升。蓝牙定位一般是基于RSS原理进行定位,分为网络侧定位和终端侧定位。其中的终端侧定位系统,适用于智能手表的室内定位技术。该系统由终端设备(比如智能手表)和beacon组成。在需要定位的区域内建立蓝牙基站,当智能手表佩戴者进入该区域内时,就会测出beacon向其发送的广播信号和数据包,得到不同基站下的RSS值、智能手表内置的算法(三角或三边算法等),进而得到智能手表佩戴者的具体位置。
2.3 惯性导航定位
WPS室内定位和蓝牙室内定位都是基于无线信号的发射或接收,对终端的定位必须要在室内区域内安装有发射器或者接收器,无法单纯地依靠终端进行定位。但是随着IC(Integrated Circuit)技术的快速发展,惯性传感器的出现顺利地解决了这一难题。惯性导航以牛顿力学理论为基础,需要通过加速度计测得人或者物的移动加速度,通过2次积分求距离;通过磁阻传感器和角速度传感器测量运动方向,实现对运动体的实时定位。
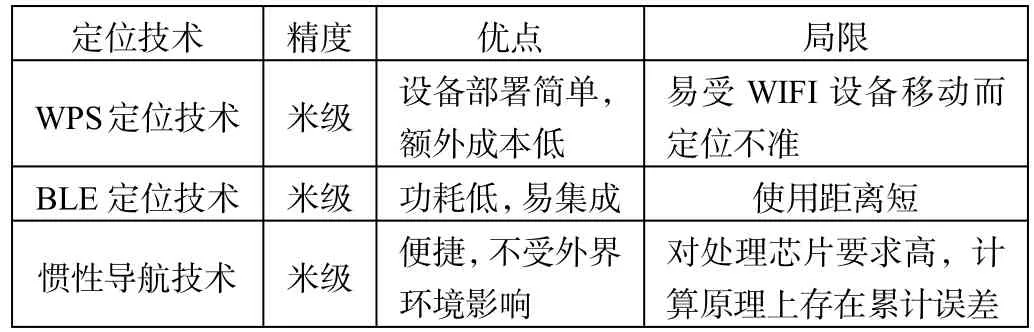
表1 智能手表定位技术对比
3 几种智能手表室内定位技术的比较
通过上述分析,智能手表的室内定位技术还是相对有限的,其中,基于无线电磁波短距离的定位(WPS定位、蓝牙定位),都需要在区域内布置相应的WIFI发射设备或基站节点,前期的投入相对较大。但是随着这些AP的增多,定位将更加精确,其中,惯性导航技术能够依靠智能手表内的传感器测得数据,进行计算定位,这在某种程度上过于依靠传感器的精度等级。几种智能手表室内定位技术的对比情况如表1所示。
[1]王杨,赵红东.室内定位技术综述及发展前景展望[J].测控技术,2016,35(7):1-3.
[2]徐伟.基于Android手机的室内定位技术研究与实现[D].武汉:华中师范大学,2014.
[3]刘林.无线定位基本概念与原理[J].学术动态,2007(4):11-12.
[4]陈永光,李修和.基于信号强度的室内定位技术[J].电子学报,2004,32(9):1457-1458.
[5]朱敏.室内定位技术分析[J].现代计算机,2008(277):79-80.
TP391.4
A
10.15913/j.cnki.kjycx.2018.01.015
2095-6835(2018)01-0015-03
目前,在市面的智能手表中,很多产品把多重定位技术作为一个卖点,主要是室外定位技术和室内技术等某几种定位技术的融合。其中,室外技术包括导航系统GNSS(即GPS、GLANESS、GALILEO、北斗)和导航增强系统(比如美国的广域增强系统WAAS、欧洲的EGNOS欧洲静地导航重叠系统、日本的MSAS多功能运输卫星增强系统等)。当然,还要涵盖在建和以后要建设的其他卫星导航系统。室内定位技术主要有基于WIFI的定位系统(WPS)、惯性传感器定位技术、磁场强度室内定位技术、红外线定位技术、超声波室内定位技术、射频识别定位技术、超宽带室内定位技术、低功耗蓝牙技术等[1]。目前适合于智能手表室内定位技术的主要有WPS定位、基于蓝牙的低功耗定位和惯性传感器定位。
智能手表采用的定位技术GPS或者北斗,在室外广阔的环境中能提供非常精确的定位信息,但是进入室内,由于钢筋混凝土墙体的遮挡,GPS信号变弱,定位精度大幅度降低,因此针对智能手表的室内定位技术发展就显得尤为重要。
〔编辑:刘晓芳〕
