立木攀爬机器人抱树机构的设计与分析*
2018-12-21邹万勇董雪丰胡程祥唐伟国
邹万勇,董雪丰,胡程祥,唐伟国
(北京林业大学 工学院,北京 100083)
0 引言
为提高作业效率、减小人工成本,林业机械正向着自动化、智能化的方向发展[1]。仿生学的应用促进了攀爬机器人的发展,在垂直的表面上爬行,攀爬机器人采用多种夹具保持稳定和机动,例如轮子、腿、真空吸盘、负压、磁力(包括永久磁铁和电磁铁)和弹性体胶粘剂等[2]。立木攀爬机器人,可用于经济林病虫害检测以及森林检测,取代了人类的工作,确保了工人的安全,尤其在森林检测方面,比无人机更加经济,弥补了无人机只能短时监测和短距离监测的缺点。为了克服现阶段机器人攀爬竹竿等径级小、质量轻的林类植物的缺点,攀爬的夹具多采用爪式结构,其结构复杂,所用电机较多[3]。为此,本文在杆件学的基础上设计出一种立木攀爬机器人的抱树机构,该机构虽然也采用爪式构型,但原理简单,小巧轻便,制造成本低,且能够满足攀爬机器人攀爬多种径级树木的要求。
1 立木攀爬机器人原理设计
立木攀爬机器人的机械结构主要由抱树机构、爬升机构、作业机构和传动机构四部分组成,其中抱树机构是机器人稳定在树上攀爬的关键机构,若夹紧力不够,则会导致机器人跌落,无法完成攀爬,更别说进行作业。因为不同品种的树,其表面粗糙度、硬度都不尽相同。要使机器人适应不同的环境,甚至在携带一定负载的情况下都可以平稳行走,必须设计出可靠且可人为调控的抱树机构。平面连杆机构可以实现多种运动规律,本文基于杆件学的基础,设计出一种新型的抱树机构,其机构原理图如图1所示。
如图1所示,驱动滑块1具有一个移动副,活动构件2与4、3与5左右对称,计算自由度时可以只计算一边,滑块2处存在左右运动的移动副,同时滑块2和执行杆件3通过铰接点A铰接,构成一个转动副,执行杆件3上有转动副铰点B。经以上分析,该连杆机构中,排除对称机构,活动构件为3个,移动副有2个,转动副有2个,没有运动高副。
根据自由度计算公式:
F=3N-2P-H.
(1)
其中:F为自由度数;N为活动构件数,N=3;P为运动低副数,P=4;H为运动高副数,H=0。经计算F=1,因此,该机构的自由度数目满足设计要求。
在抱树机构的实际设计中,采用两套如图1所示的连杆机构,并通过共用一个驱动滑块将其连接起来。驱动滑块1采用直线电机驱动。抱树机构在SolidWorks 2014中的三维造型如图2所示。

1-驱动滑块;2,4-滑块;3,5-执行杆件
图1抱树机构原理示意图图2抱树机构三维造型
2 结构改进
在实验样机的制造过程中,发现抱树机构中的滑块2、4由于其自身以及与之相连的杆件3和5存在重力作用,滑块与轨道间容易出现装配误差所带来的间隙,导致机构运行不稳定。为了既能使制造出的实验机满足功能需要,又能简化制造过程,节约制作成本,本文针对图1所示机构原理图进行改进,改进后的抱树机构原理示意图如图3所示。
如图3所示,在原有设计的基础上增加了弹簧6和8,由于有弹簧力的存在,使得杆件3和5会分别绕着铰接点B和D做微量转动,这样就克服了滑块2和4的重力作用,使得滑块2、4能够贴紧轨道,避免了采用更加复杂和精密的滑块机构设计,简化了滑块2、4的结构,节约了加工制造成本。在实际运行过程中,由于有弹簧弹力的作用,使得滑块能够与运行轨道贴紧,解决了影响机构稳定运行的间隙问题。改进后的抱树机构实物如图4所示。
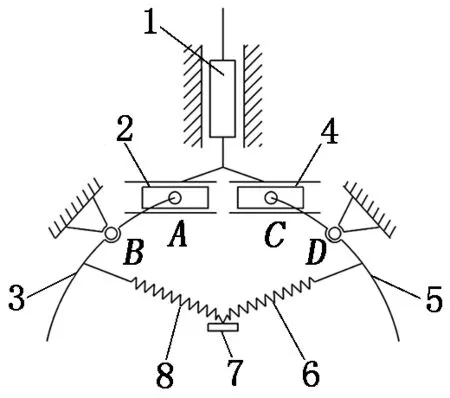
6,8-弹簧;7-弹簧座
3 物理样机实验
为了验证立木攀爬机器人抱树机构的可行性,本文针对样机开展了实验,实验中使用的设备有立木攀爬机器人装置、电脑、插线板、控制板和电源等。实验中,通过控制电机运行观察抱树机构在攀爬过程中的功能实现情况,图5为实验过程中攀爬机器人爬树效果图。从图5中可以看出:抱树机构能够在攀爬的过程中抱住树木,不至于使机器人坠落,满足了设计要求。
4 结论
通过对抱树机构进行原理设计,建立了抱树机构的三维模型,结合实际制造过程中遇到的问题,又提出了机构的改进方案,最后通过实验,验证了本文所设计的抱树机构能够满足攀爬机器人的攀爬要求,且本结构的完成为立木攀爬机器人更进一步地研究提供了结构基础。

图4改进后的抱树机构实物图图5抱树机构效果图
