无速度传感器新型矿用异步电机矢量控制系统仿真研究
2018-12-21刘志远程小舟
刘志远 程小舟
(1.中钢集团马鞍山矿山研究院有限公司;2.华唯金属矿产资源高效循环利用国家工程研究中心有限公司)
随着节能降耗意识的增强,矿山企业对高性能矿用电机矢量控制系统的需求逐步增大。转速辨识的准确性作为矢量控制系统性能指标的重要参数之一,在转速闭环控制中不可或缺。工业中高性能的场合已普遍使用了基于转子磁场定向的矢量控制系统,一般会通过安装传感器元件或光电编码器来进行转速辨识。矿山企业工业现场环境复杂,噪音大、粉尘多,传感器元件或光电编码器能否正常工作以及其工作精度均会受到周围环境的影响,而且这些元件的使用会增加系统的设计使用成本。相比之下,无速度传感器矢量控制技术成为近年来国内外交流调速重要的研究方向。该技术通过测量电机定子端的电压和电流,用测得的参数来估算转子速度,从而实现异步电机的矢量控制,这种方法消除了因传感器的安装使用而带来的成本增高以及系统可靠性问题,适合在矿山电机控制系统中推广使用。
为此,基于模型参考自适应的转速估计模型进行矿用异步电机无速度传感器矢量控制系统结构设计,并借助Matlab/Simulink仿真软件进行仿真模拟,证明该系统结构具有良好的静态特性和动态特性。
1 异步电机矢量控制和SVPWM调制技术
1.1 异步电机矢量控制
控制电机最根本的目的是实现优良的调速性能和一定的过载能力,因为直流电机励磁电流和电枢电流的相互独立,所以具有较好的调节特性矢量控制技术。利用坐标变换思想将电机的三相系统等效为两相系统[1],然后通过转子磁场定向的同步旋转变换实现对定子电流励磁分量与转矩分量之间的解耦,从而达到分别控制交流电机的磁链和转矩的目的,得到类似于控制直流电机的效果。
异步电机在两相同步旋转坐标系即dq坐标系下的数学模型为:
(1)
励磁方程为:
(2)
式中,Tr=Lr/Rr为转子励磁时间常数。
由式(2)可知,调节定子电流的isd分量可以调节转子磁链ψr,当该定子电流磁通分量保持不变时,转子磁通保持不变。
转矩方程为:
(3)
由式(3)可见,控制定子电流分量isq可控制电机的电磁转矩Te,通过该转矩分量可调节电机的转速[2]。
通过控制定子电流的励磁分量isd来保持ψr恒定,再通过控制电流转矩分量isq实现对转矩Te的瞬时控制。故采用基于转子磁链定向的矢量控制方法,可实现对电流转矩和励磁分量解耦控制。
如图1所示,ASR为转速调节器,AψR为转子磁链调节器。速度环为外环,采用无速度传感器估计转速。当转子磁链发生波动时,将影响电磁转矩,进而影响电机转速。故在转速调节器ASR后增设转矩调节器,当转子磁链发生波动时,通过转矩调节器及时调整电流转矩给定值,以抵消磁链变化的影响,尽可能不影响或少影响电机转速[3]。
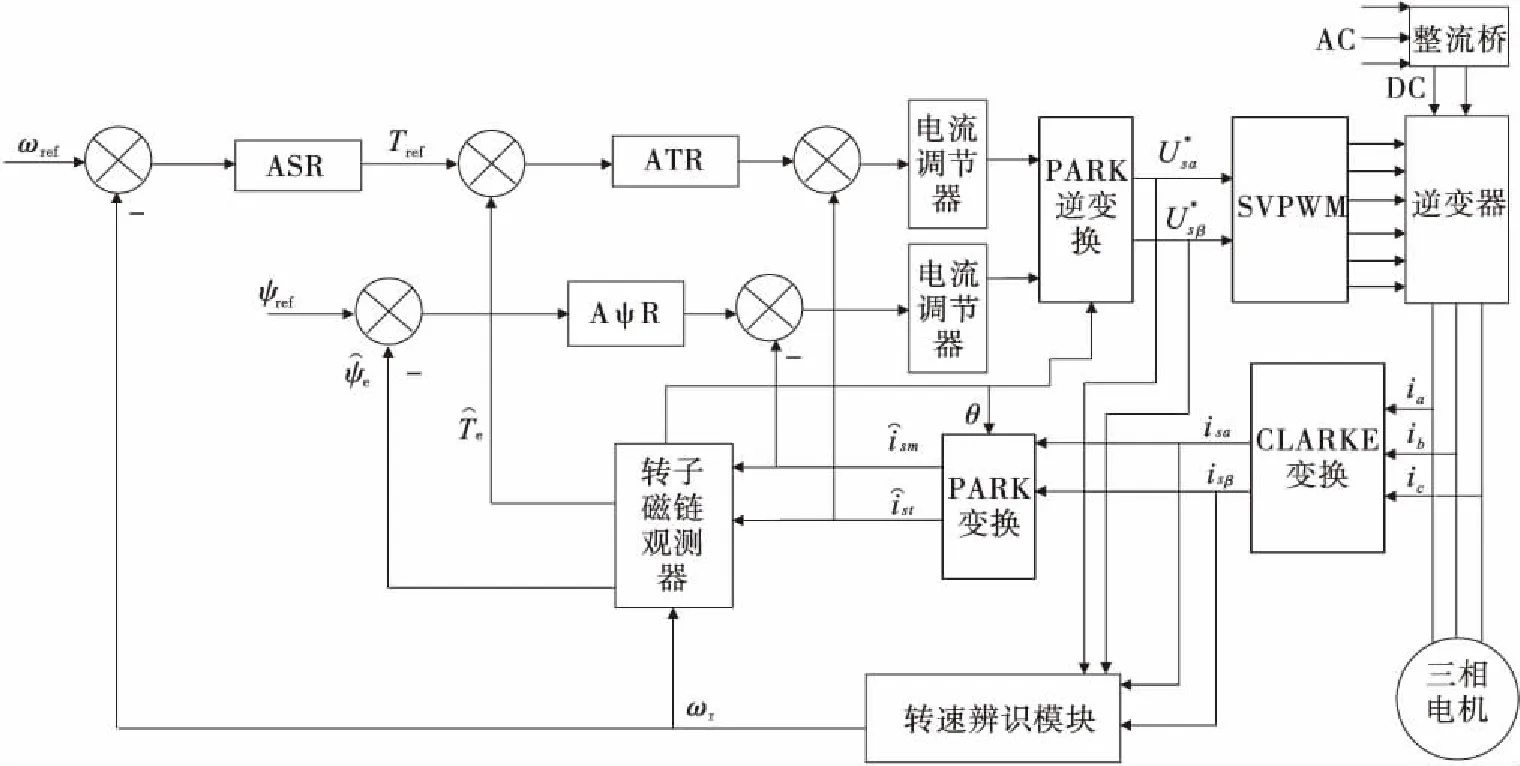
图1 转子磁场定向无速度传感器矢量控制系统结构
1.2 SVPWM调制技术
交流电机需要输入三相正弦电流的最终目的是在电机空间形成圆形旋转磁场,从而产生恒定的电磁转矩。把逆变器和交流电机视为一体,以圆形旋转磁场为目标来控制逆变器的工作,这种控制方法称作磁链跟踪控制,磁链轨迹的控制是通过交替使用不同的电压空间矢量实现的,故又称电压空间矢量PWM(SVPWM)控制[3]。
如图2所示,SVPWM调制基本原理为:将期望电压uref作为控制对象,期望电压由三相空间电压矢量相加而成,以其在α-β坐标系下的分量和usα、usβ和PWM周期T作为输入,通过判断参考电压uref所处的扇区和该扇区的两个基本电压矢量和零矢量来确定是如何合成参考电压的。逆变器共有8个基本输出矢量,有6个有效工作矢量和2个零矢量。用相邻的2个有效工作矢量,可以合成任意的期望输出电压矢量,使磁链轨迹接近于圆。与一般的SPWM相比较,SVPWM调制方式的输出电压最多可提高15个百分点[3]。

图2 基本电压空间矢量图
2 无速度传感器系统
在无速度传感器系统设计的各种不同的方法中,模型参考自适应法(MRAS)是其中最流行的技术,模型参考自适应法最早是由美国MIT 大学教授首先提出的,该方法与计算机技术和控制理论的关系密切。因此,随着计算机技术和控制理论体系的不断完善,模型参考自适应法的实现变得越来越简单,应用也越来越广泛。如果把速度推定归结为参考辨识[1],则可以用模型参考自适应理论来构造能够辨识速度的系统。在这种情况下系统为非线性系统,于是可用Popov的超稳定理论在保证系统稳定的条件下推导出辨识算法。
模型参考自适应控制原理可用图3说明[4],其主要思想是将不含未知数参数的方程作为参考模型,而将含有待估计参数的方程作为可调模型,两个模型具有相同的物理意义输出量,利用两个模型输入量的误差构成合适的自适应律来实时调节可调模型的参数,以达到控制对象的输出跟踪参考模型的目的。

图3 模型参考自适应系统结构
由电机在α-β坐标系下的电压和磁链方程,可得到磁链的电压模型和电流模型,分别为:
(4)
(5)
由式(4)和式5)可知,电机的电压模型与电机速度无关,而电流模型恰好含有速度信号。因此,根据自适应系统的基本理论,系统中的电压和电流模型能够分别当作参考模型和可调模型。以基于波波夫稳定性理论设计的自适应律调整这两种模型的状态误差,能够实现可调模型的输出接近实际电机的速度。该模型的具体结构见图4[4]。
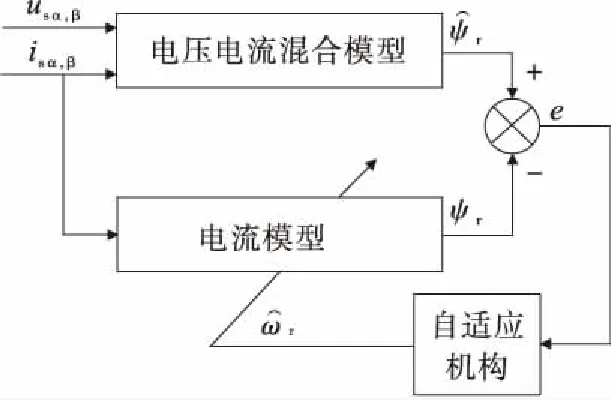
图4 基于转子磁链的MRAS
3 仿真分析
3.1 仿真模型
按转子磁链定向的转子磁链计算模型见图5。该模块的输入为定子三相电流,输出为转子磁链在d-q坐标系下的幅值和转子磁场定向角。基于模型参考自适应的转速辨识模块见图6,该辨识模块的输入为两相静止坐标系上的定子电压和电流,输出为转子转速[5-6]。
结合图1所示结构以及转子磁链计算和转速辨识等模块,可得异步电机无速度传感器的矢量控制系统仿真模型见图7[5-6]。
3.2 仿真结果
系统仿真分两个阶段进行,包括电机在低速阶段运行和高速阶段运行。在高速运行阶段给定转速为1 200 r/min,空载启动,在1 s时加30 N·m的负载,在1.5 s时加30 N·m的反向负载。实际转速波形、估算转速波形以及电磁转矩见图8。

图5 转子磁链计算模型
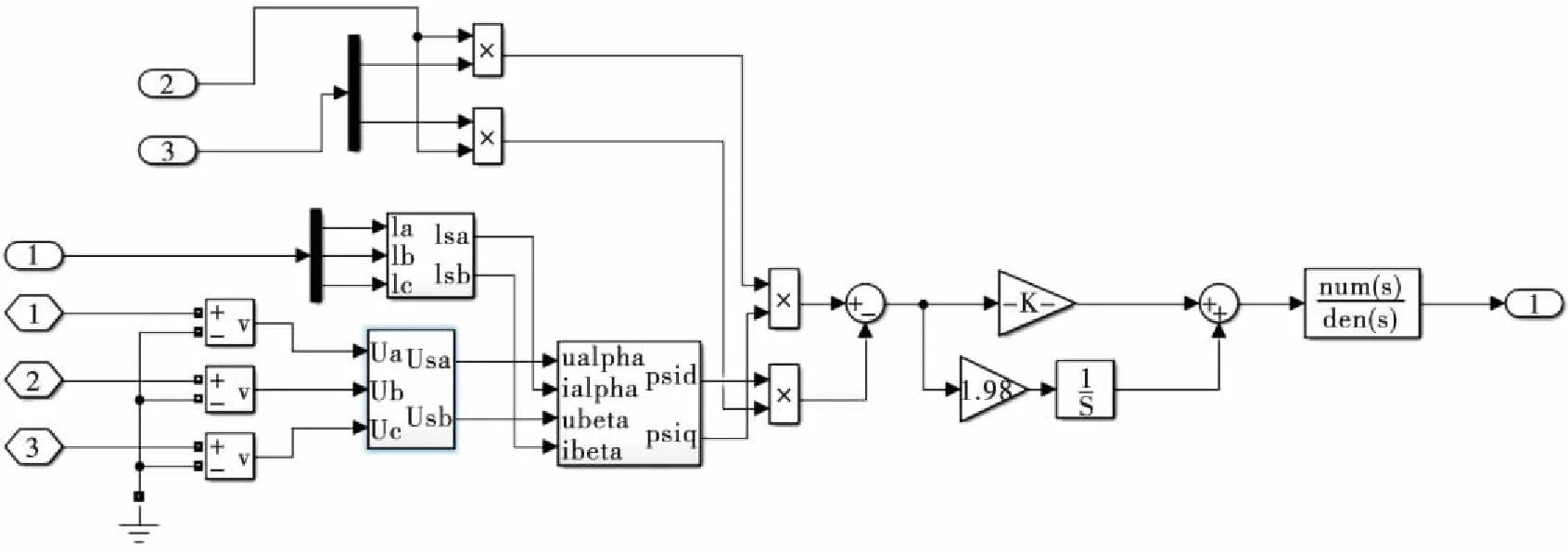
图6 转速辨识模块

图7 无速度传感器矢量控制系统仿真模型
由图8可见,空载启动后电机转速在0.6 s后达到并稳定再给定转速;带有小幅波动的是估算转速,较平滑的是测量的实际转速,可以观察到两者差异较小;在1 s时刻和1.5 s时刻给定的负载引起转速轻微扰动,转速很快恢复稳定,响应时间快。
在低速运行阶段,给定转速为200 r/min,空载启动,同样在1 s时加30 N·m的负载,在1.5 s时加30 N·m的反向负载。实际转速波形、估算转速波形以及电磁转矩见图9。
由图9可见,空载启动后转速在0.2 s时刻达到给定转速,1 s时刻和1.5 s时刻突加负载引起转速扰动,转速很快恢复到给定转速,抗扰性强。
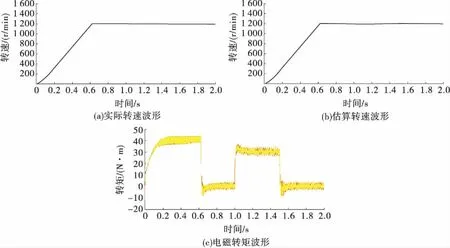
图8 高速运行阶段波形
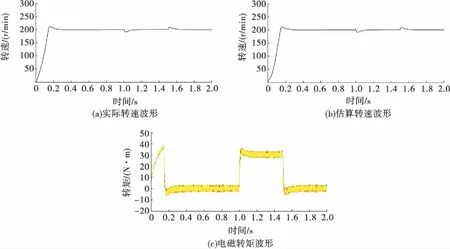
图9 低速运行阶段波形
由两次仿真结果可知,在高转速阶段以及低转速阶段电机估算转速仅有小幅波动,能够较好的跟踪实际转速[7],说明采用模型参考自适应法的无速度传感器系统控制精度好,且可以同时适应高速和低速环境。
4 结 论
采用模型参考自适应法的异步电机无速度传感器矢量控制系统能够满足交流调速系统可靠性和稳定性的需求。与采用速度传感器的异步电机矢量控制系统相比,减少了检测装置,避免了速度传感器检测本身带来的误差,对于矿用电机来说,提高了工艺流程的精度,同时也降低了矿山企业的设备成本,具有很好的推广应用价值。
