基于一致性的电源模块并联控制策略
2018-12-20汪涛朱一昕熊连松
汪涛,朱一昕,熊连松
(江南大学物联网工程学院,江苏无锡214000)
三相电压型整流器具有交流侧电流正弦化,功率因素高等优点,同时其主电路结构简单,控制方便,能量损耗低,因此三相电压型整流器成为电力电子领域一个重要的研究分支,在工业方面被广泛的使用,如有源电力滤波器,可再生能源并网发电,超导储能等等。
随着现如今国家新能源建设进程的不断加快,电动汽车作为一种清洁的代步工具愈来愈受到政府的重视,在不远的将来新能源汽车取代燃油汽车已经成为一种必然趋势,因此针对电动汽车的基础设施建设,例如充电桩(站)的建设必须加快,公共充电场所必然以直流充电桩为主导,直流充电桩是以三相交流电作为输入,经过大功率AC/DC模块将交流电装变为直流电从而供给电动汽车。而大功率电源模块的并联既可以提高系统的容量又可以使得并联模块之间分摊输出功率增加电源模块的使用寿命。
大功率模块间的并联需要考虑模块的均流问题,在现实中各个模块之间的参数不可能做到完全一致,这就必然会导致模块间输出电流的分摊不均,传统的并联均流技术有主从控制和外特性下垂法,文献[4]提出一种统一电压调节器的均流控制方式,文献[16]应用一种最大电流自主均流法。主从控制一旦主模块损坏整个系统将不能运行,系统的冗余性低;而下垂控制虽然冗余性高但均流精度和电压精度不能同时满足;最大电流自主均流法会造成电流的低频振荡。本文提出一种基于一致性的并联均流策略,既满具有下垂控制的冗余性,又具有主从控制的电流分配精度。
1 三相电压型PWM整流器数学模型及并联环流分析
1.1 三相PWM整流器的数学模型及其控制
图1所示为三相PWM整流器电压电流双闭环控制系统结构图,图中Ea,Eb,Ec为三相电网电压,L为滤波电感,C为直流侧滤波电容,RL为负载。

图1 三相PWM整流器的电压电流双闭环控制
令sk为功率开关管函数,sk为1表示上桥臂导通,下桥臂关断;sk为0上桥臂关断,下桥臂导通;k=a,b,c;在静止坐标系下三相PWM整流器的数学模型可以由下式表示:

将三相静止坐标系转换为两相旋转坐标系dq模型,可以得到dq两相电流微分方程为:

将公式(2)进行变换可以将电流内环设计为:
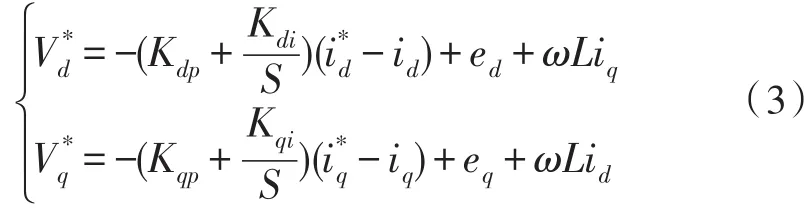
将直流侧输出电压作为电压外环的反馈量,与电压给定信号经过PI调节器后得到控制电流信号,电流控制信号经过以上推得的电流内环公式得出dq轴的电压分解信号,最后经PWM脉冲发生器给晶闸管导通信号,对整流器进行控制。
1.2 三相PWM整流器并联环流分析
图2所示为三相PWM整流器的并联拓扑结构,整流模块之间的并联因为各个整流器之间参数的差异和输出端线路阻抗的不同,从而导致各个模块之间输出电流的差异,使得有些模块电流输出大[17],有些输出电流小,并联整流器输出的功率差异比较大导致各个整流模块使用寿命的不均衡,严重时将导致模块烧毁。

图2 三相PWM整流器并联拓扑
图3为整流器并联环流等效示意图,整流模块1输出电流为i1,整流模块2输出电流为i2,由于两个整流模块的参数不一致,导致模块1和模块2的输出电压不等,又由于整流模块的等效电阻R1,R2远小于负载阻值RL,因此很小的电压差ΔU经过极小的电阻R1,R2会形成较大的环流io。

由式(4)得出整流模块的输出功率:
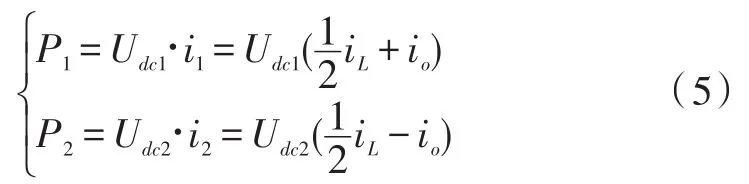
Udc1≈Udc2,由式(5)推出两个整流模块输出功率差为ΔP=P1-P2=2Udc1io,因为直流输出电压很大,如果环流io也较大,则两模块输出功率差距很大,输出功率大的模块电应力大,寿命短,不利于并联系统的稳定性。当模块间实现均流时,i1≈i2,io很小,ΔP很小,模块输出功率

图3 整流器并联环流等效示意图
分配均匀,各个模块的电应力大小基本一致,增强了系统的稳定性。
2 基于一致性算法的整流器均流策略
2.1 离散一致性算法
一致性算法在多智能体领域中被广泛应用,其本质是收集相邻信息节点之间的变量,通过对相邻信息节点直接的信息进行交互迭代[18],最终使得各个节点之间的变量收敛于一个相同的值。
电力元件之间的信息交互可以用一致性算法离散的形式表示,其特性可以表示为:

由于矩阵A为行随机矩阵上式可以简化为:

一致性算法的通信拓扑可以是任意的,只要满足通信拓扑为连通图即可,不同的通信拓扑只会影响通信节点信息的一致性收敛速度。
2.2 基于一致性的三相PWM均流策略
将并联系统中的每个模块视为一个节点,并联的整流模块系统之间的信息拓扑可以视为由N个信息节点组成的无相连通图,令im表示信息节点m的电流信息,K为迭代次数,在并联系统中各节点的电流变量根据其相邻节点的电流变量进行调整,随着迭代次数的增加,各节点间的电流误差越来越小,最终达到一致性收敛,一致性迭公式可以表示为:

其中im(k)和in(k)表示为第k次迭代节点m,n的信息,δmn表示迭代系数。N为信息节点的总个数。整个系统可以写成矩阵形式:

W为通信网络的权重矩阵。

式中E为N阶单位阵,当ε为上式取值时收敛最快,λi(L)表示矩阵L的第i大特征值,假设i(0)是每个节点所保存的初始值A表示所有元素都是1的列向量,最终所有节点电流均收敛为:

基于一致性算法的并联均流控制框图可以表示为图4。

图4 基于一致性算法的并联均流控制框图
3 仿真
3.1 基于一致性算法均流策略仿真分析
为了验证所提方法的可行性,利用matlab/simulink工具搭出仿真模型进行验证,并联系统之间的通信拓扑如图5所示。得到的仿真结果分别如图6~12所示。本仿真由四台三相PWM整流器组成并联系统,四台三相PWM整流器参数,交流侧电感均为0.7 mH,电容分别为4 000 μF,5 000 μF,5 500 μF,7 000 μF,线路阻抗 0.3 Ω,0.4 Ω,0.5 Ω,0.1 Ω。

图5 并联模块通信拓扑
交流侧输入电压幅值220 V,直流侧给定电压600 V,负载电阻5 Ω。
各个模块直接并联时可知,由于各模块之间参数存在一定差异,因此模块之间输出电流分配不均,最大输出电流32.2 A,最小输出电流27.8 A,电流波形如图6所示。

0.3 s时刻加入一致性算法,系统开始迭代相邻模块电流值,慢慢的系统电流开始收敛趋向于30 A,最大电流30.1 A,最小电流值29.95 A,均流精度很高。电流波形图如图7所示。

表3.2直接并联系统模块输出电流波形

图6 未加入均流控制策略输出电流

图7 加入一致性算法后输出电流
直流母线电压波形如图8所示。
3.2 并联系统负载突变情况下的仿真
在现实状况中,负载往往不可能一成不变,一个好的均流策略不仅要能够使得系统在稳态下获得良好的均流精度[19],在负载突变或者电压突变等暂态情况下更应该有良好的动态性能和稳态性能。
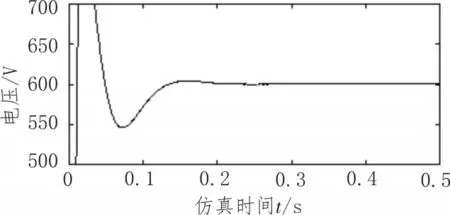
图8 直流母线电压
在0.8 s时刻设置系统负载突减,由5 Ω突减为2.5 Ω,负载突减的一瞬间并联系统电流有些差异,0.1 s后电流重新均分,系统动态响应快,稳定性也好。图9,10所示为系统负载突降的电压电流波形。

图9 突减负载时直流侧电压

图10 系统负载突变时刻输出电流
3.3 并联系统负电压突变情况下的仿真
如图11,12所示系统在0.8 s时从输出600 V直流电突减为500 V的电压与电流波形,突减初始时刻,输出电流发生不均流现象,0,9 s时系统趋向于稳定并在1.05 s左右完全均流,动态响应快,稳定性好。

图11 输出电压突变
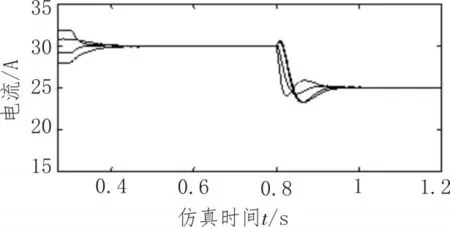
图12 电压突降情况下输出电流
4 结论
文中提出了一种基于一致性算法的三相PWM整流器的并联控制策略并在Simulink中搭建四台整流器并联模型,分析了三相PWM整流器的数学模型及环流机理,基于一致性的PWM整流器并联均流策略中并联模块之间无主次之分,每个模块都是独立存在的,相对于主从控制冗余性高;模块间通过电流信息的实时共享,不断的调整模块输出电流,最终趋向于一个稳定值,均流精度高。本方法为电源模块间的均流问题提供了一种新的思路,同时可以适用于DC/DC变流器之间的并联,仿真结果表明了本文所提控制策略的有效性。