一种比赛运动目标自适应跟踪算法的GPU实现*
2018-12-20马艳军
马艳军,于 雷
(1.宁夏大学 体育学院,宁夏 银川 750021;2.宁夏大学 网络与信息管理中心,宁夏 银川 750021)
计算机视觉是指针对视频或图像信息,利用高性能处理器和处理算法对信息特征进行识别、跟踪、提取等,从而令计算机具备快速、精确认知视频或图像信息的能力.在计算机视觉技术领域,运动目标检测在军事制导、视觉导航、机器人控制、智能交通、电视直播等领域有着广泛的应用[1-2],已经成为国内外学者的研究热点.
运动目标跟踪需要借助被跟踪目标的运动方向、形状、大小等信息,实现目标的实时动态跟踪.现有的运动目标跟踪方法由目标表示、时空预测和模型更新组成.文献[3]在建立运动目标概率模型的基础上.利用基于卡尔曼滤波器的预测校正方法实现了无人地面车辆的运动目标跟踪.文献[4]利用像素、部位、外形等级别的粒度重建了目标模型,进而提出集成化的自适应决策树来实现运动目标的精确跟踪.文献[5]针对目标的快速移动性以及通信系统的带宽限制与有限通信距离等问题,设计了一种基于柔性融合的优化学习算法,实现了传感器信息与运动目标跟踪的高效融合.文献[6]基于跟踪门、强度叠加等技术实现了运动目标信息的精确融合,进而实现了运动目标特征的快速识别.文献[7]利用视频跨域拼接技术实现了运动目标的单一场景展示,进而基于ViBe背景建模、Kalman滤波等方法实现了目标运动轨迹的快速、精确检测.文献[8]基于傅里叶卷积方法和广义逆理论,实现了灵活跟踪.
本文提出一种基于特征融合与粒子滤波的新型自适应目标跟踪算法:利用特征融合建立精确的运动目标模型,基于粒子滤波方法实现模型的快速跟踪.此外,建立了以图像处理单元(graphics processing unit,GPU)为核心的运动目标跟踪硬件平台.最后,在该平台上进行相关实验,验证所提方法的有效性.
1 目标跟踪算法
1.1 运动目标特征融合
特征融合的目的在于提取、分析、整合移动目标的特征信息,从而建立反映物体运动状态的描述方程.假设x=[x1,x2, …,xn]代表运动目标的状态,t=1, 2, …,n;xt=[dt,st]代表运动目标在t时刻的状态,dt为方向,st为速度.特征融合的方法包括方向与速度的概率优化和权重整合.
首先,提出式(1)和式(2)所示的不同运动目标x(i)、x(j)的方向与速度的概率优化方法:
(1)
(2)
式中:f(·)为特征融合函数,用于拟合运动目标的状态;P(·)为概率融合,用于校正融合后的运动状态;λ为融合校正系数;上角标(i)、(j)分别代表第i、j个移动目标.
其次,为了实现特征的有机整合,需要在满足式(3)所示的融合代价函数的基础上,实现基于式(4)所示的运动状态权重整合,最终得到运动目标特征融合后的状态描述.
(3)
(4)
式中:α、β为权重调整系数;φ(·)为运动目标的状态描述方程.
1.2 粒子滤波目标跟踪
粒子滤波的作用是对建立的运动目标状态描述方程进行滤波与识别[9],从而实现移动物体的快速跟踪.为了表征目标被精确跟踪,需要基于目标状态描述建立方程,并判断后验概率密度函数:
(5)
式中:0 <ωi< 1为后验概率系数.一般情况下,为了充分利用后验概率密度函数的判别性能,需要对其后验概率系数进行修改,以使其适应移动状态下的目标判别.后验概率系数修改为:
(6)
式中:wi_t+1、wi_t分别为后验概率系数在t+1、t时刻的取值.在得到后验概率系数后,即可计算候选粒子的跟踪概率,即
(7)
式中:μ、σ2分别为粒子偏差与方差.
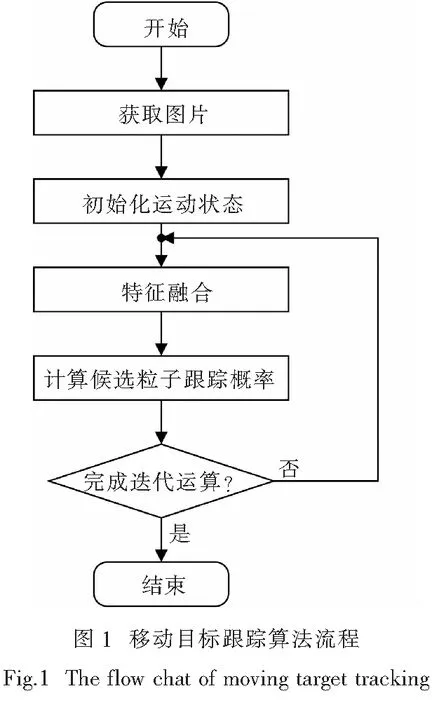
式中:‖·‖2为L2范数.基于以上推导,给出如图1所示的移动目标跟踪方法.
2 基于GPU的算法实现平台
为了实现移动目标的检测,单纯依靠算法是远远不够的,必须建立适合图像数据处理的硬件系统.与常见的中央处理单元(CPU)相比,图像处理单元GPU具备更加简洁而高效的计算架构,控制逻辑简单且不存在Cache,具备更多的线程数和寄存器,非常适合并行计算.建立基于GPU的图像处理服务器,对于提高视频/图像识别精度具有重要意义.本文选择表1所示的GPU作为图像处理算法平台的硬件核心GPU.表2给出了所选GPU的具体数据.
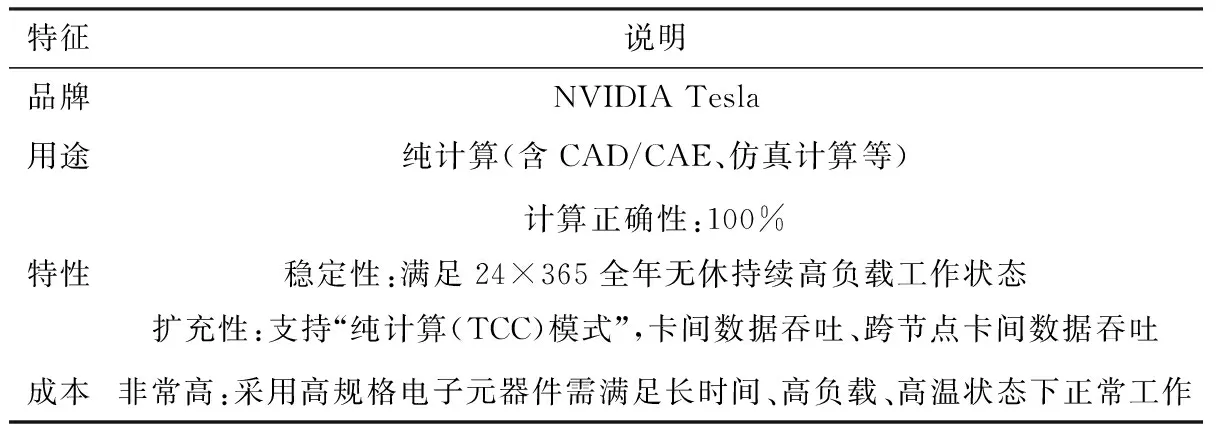
表1 选用的GPU特征Tab.1 Features of the adopted GPU

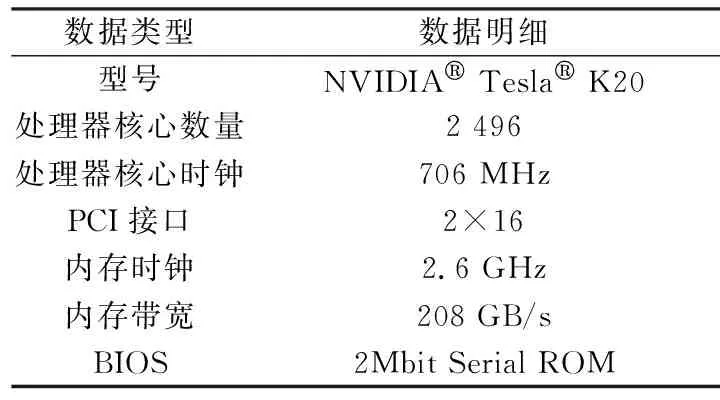
表2 选用的GPU数据Tab.2 Datasheet of the adopted GPU
在选择好GPU型号后,设计如图2所示的GPU外围电路,即可形成完整的图像处理实验平台.
3 实验结果与分析
为了验证所提运动目标跟踪算法与硬件平台,针对足球比赛中的运动球员跟踪问题进行了实验分析,实验结果如图3所示.无论含有少量运动物体的图像,还是含有多个运动物体的图像,所提方法均可以在毫秒级别的时间内实现运动目标的精确跟踪,且跟踪精度>99.2%.由此可知,所提跟踪算法与硬件平台可以实现运动目标的自适应、快速、精确跟踪.

4 结论
针对足球比赛中移动目标的实时、精确跟踪问题,提出一种基于特征融合与粒子滤波的新型自适应目标跟踪算法.利用特征融合建立精确的运动目标模型,基于粒子滤波方法实现模型的快速跟踪.设计基于图像处理单元的,包括外围电路的算法实现硬件平台.实验结果表明,所提算法及硬件平台的高效整合可以实现运动目标的快速、高精度跟踪.
