我国轨道式巡检机器人研究及发展现状
2018-12-20左兆陆窦少校
吴 锴,左兆陆,2*,窦少校
我国轨道式巡检机器人研究及发展现状
吴 锴1,左兆陆1,2*,窦少校2,3
(1. 中国科学院合肥物质科学研究院,安徽 合肥 230000;2. 合肥市信同信息科技有限公司,安徽 合肥 230000; 3. 临沂迪普环保科技有限公司,山东 临沂 276100)
轨道式巡检机器人在国内的发展日新月异,其应用范围已经从早期应用较广的变电站领域扩展到地下矿井、污水廊道和城市综合管廊等地方。本文对国内的轨道式巡检机器人的发展进行介绍,对轨道式巡检机器人做分类,对轨道巡检机器人的常用功能做归纳,对国内轨道式巡检机器人的市场做综合分析,旨在总结我国轨道式巡检机器人的研究和发展现状,对诸多国内学者们之前的相关研究做一总结和补充。
国内;轨道;巡检机器人;市场
0 引言
随着人工智能技术及机器人技术的日益发展,巡检机器人在各种领域中被广泛应用越[1-2],它们的作用是替代或辅助人类进行各种巡检工作,因为巡检工作一般是枯燥、重复性强、机械性、耗时费力和劳动密集型的工作。目前应用最为广泛的领域有:变电站、地下管廊、矿井和监狱等处所[3]。按照工作模式可以分为飞行式、轮式、轨道式和固定式。而轨道式巡检机器人是现在各领域中应用最广泛的一种[4]。
轨道式巡检机器人的出现早于其他工作模式的巡检机器人,技术上也相对成熟,它通常搭载了温度、湿度、烟雾、气体、雷达、声音、图像、定位等各类功能的传感器,结合专门设计的硬件结构和智能化软件系统[5],总体上具有图像、语音识别功能、远程传输各类数据的功能、远程控制以及感知所处环境其他信息等功能[5]。因为轨道式巡检机器人的巡检路径是固定的,它能在轨道经过的地区附近代替人工巡检。如变电站的高空电缆上,地下污水廊道中,地下电缆管廊中和地下矿井下。这些地方通常是空气潮湿、空气异味重、存在有毒有害气体、粉尘浓度高和噪声强等地方。应用轨道式巡检机器人可以有效地提高巡检安全性、巡检质量,降低人工劳动强度和单位的人工成本。
国内一些学者在参考国外的轨道式巡检机器人后,已经对轨道式巡检机器人进行了许多研究,国内有一些成功的应用案例,甚至在市场上出现了成熟的通用产品。本文对我国轨道式巡检机器人相关技术进行广泛调研,介绍国内、外轨道式巡检机器人的发展历程,描述相关产品的推广应用情况,总结轨道式巡检机器人的关键技术研究现状,对诸多学者们之前的研究做一总结或补充。
1 国内轨道式巡检机器人的研究进展
1.1 国内研究机构对轨道式巡检机器人的研究进展
相对于国外而言,我国研究轨道式巡检机器人较晚,因为很多学者已经对国外的巡检机器人写过 相关综述了,所以这里不赘述。在我国直到20世纪90年代末期,才开始对轨道式巡线机器人有相关的研究。山东大学、武汉大学、沈阳航空航天大学等研究机构相继在轨道式巡线机器人领域展开了研究,研制了样机。
2007年,山东大学黄淑祥等人研制出了一种如图1-1所示的悬挂式巡检机器人,该机器人采用双臂设计方案,且有质心调节机构,可以跨越高压塔,但越障时主要靠单机械臂搭在高压电线上,降低了机器人的安全性,而且单臂越障控制较难,行走时会出现左右摇摆的现象。
2010年,武汉大学吴功平及其研究团队研发出了一种双臂式巡线机器人。该双臂式巡线机器人的两机械臂搭在高压电线上,可以稳定的越过防震锤、绝缘子和跳线等障碍物,通过搭载的专用高清摄像头,采集地面信号。
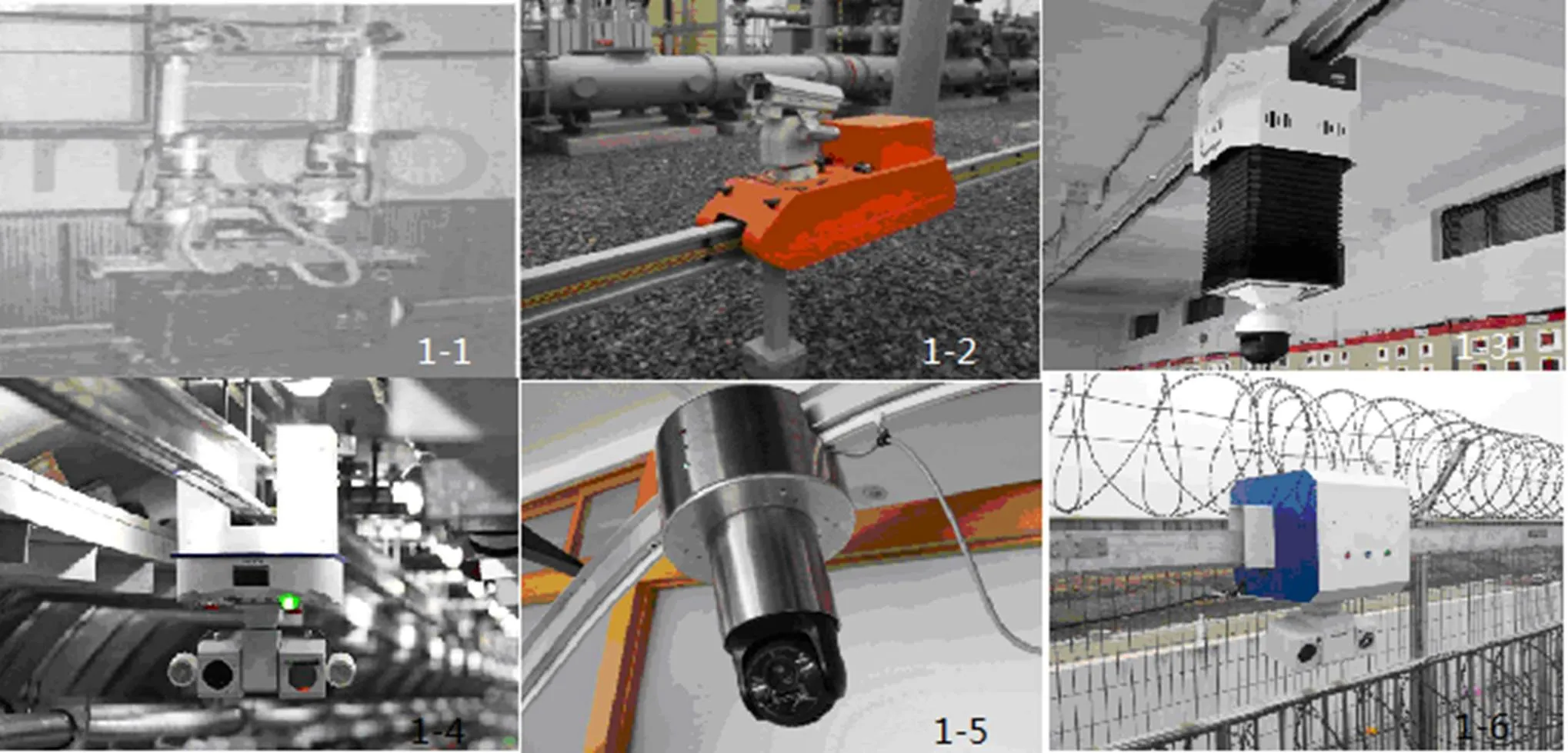
图1 各种轨道式巡检机器人
2016年,辽宁科技大学研制了一款如图1-2所示的变电站轨道巡检机器人。它采用了固定安装在地面式的轨道,滑线取电技术,电力载波通讯技术。该机器人具有移动速度快,体积小,重量轻,定位精度高,不需充电,数据传输速度快等特点,在一个220 kV数字化变电站作为试验场所应用成功。
1.2 国内企业对轨道式巡检机器人的研究进展
与此同时,随着国家对人工智能技术在各个领域的大力倡导应用,在国内外科研机构的样机基础之上,我国企业在轨道式巡检人的研究上也是成绩斐然。在2010年之后,国内的一些企业如:浙江国自机器人技术有限公司、合肥市信同信息科技有限公司以及深圳市朗驰欣创科技股份有限公司等,都推出了自己的产品[6-7]。
2011年,浙江国自机器人技术有限公司成功开发出了轻型挂轨式机器人。该产品采用悬挂轨道行走方式,主要应用于工业厂区中的开关室、配电室等室内环境,爬坡能力强,拥有转弯半径小,狭小空间通过能力强等优势。
2014年,合肥市信同信息科技有限公司]研制的多功能轨道式巡检机器人,一款可长距离位置方向运动、监测发热物体温度变化、动态图像分析的自动预警系统,主要用于配电房实时监控和查表使用,如图1-3所示。它运用了电力载波技术,无需专门为机器人提供供电线,免去了为机器人充电的过程。
2016年深圳市朗驰欣创科技股份有限公司研制了一款城市管廊轨道式巡检机器人,如图1-4,它特别适合在管廊中穿梭。它配置了高精度陀螺仪,能够精确绘制三维运行轨迹;它还搭载了红外热成像仪,能对电力高压输送线路和热力管道进行表面温度探测,提前发现高温异常。如果发现有火灾隐患,该机器人搭载的灭火装置可以防火灾于未然。还能对管廊外壁表面温度分析进行预警。
2 轨道式巡检机器人的分类
顾名思义,轨道式巡检机器人是机器人沿着已有的轨道进行巡检工作的,“有轨”是它们最大的共同点,而它们的轨道有的是柔性轨道,有的是刚性轨道,按照轨道材料的强度将其划分为柔性轨道巡检机器人和刚性轨道巡检机器人[8]。
采用柔性轨道的巡检机器人一般是指悬挂式巡检机器人,如:山东大学—悬挂式巡检机器人,如图1-1所示,武汉大学双臂式巡线机器人是此类机器人。该类巡检机器人的轨道材质相对柔韧,多为电缆线或者钢丝悬线,轨道承载重力受一定的限制。该类轨道式巡检机器人多从上方俯视巡检其侧方和下方被测目标,利用搭载的各类传感器采集下方被测目标的各种信息。但是,此类机器人大多有一个缺点,就是巡检时易左右摇摆。
而采用刚性轨道的巡检机器人,有的用于在上空进行巡检作业,也有在地面上进行巡检作业的,这些巡检机器人的轨道多为槽钢,工字钢,片钢或者其他自行设计的钢轨。例如:浙江国自机器人技术有限公司轻型挂轨式机器人,其轨道为两个工字钢拼接而成的。深圳市朗驰欣创科技股份有限公司的城市管廊巡检机器人,如图1-4所示,其轨道为单工字钢。再如,合肥信同信息科技有限公司研制的隧道巡检机器人,如图1-5所示,其轨道形状为特殊地形特殊设计,其公司设计的周界巡视机器人如图1-6所示,其轨道为片型钢材。
3 现在市场上轨道式巡检机器人流行的几种常用功能
3.1 图像监控功能
图像监控功能是轨道式巡检机器人的基础功能之一,依托其搭载的高清摄像头,通信网络和控制端实现。用于巡检时采集被测环境或被测目标的图像、视频。搭载的高清摄像头通常能够360°多维度拍摄,自动变焦,自动对焦。巡检机器人可以在到达控制端设定好的地址,按程序自动完成拍摄,也可以有控制端的工作人员自行操作。拍摄的图像信息从通信线路传送给控制终端。其中通信网络技术是可以是PLC电力载波、GPRS通用分组无线服务技术和LAN局域网技术等。控制端可是PC机和智能手机。
3.2 火情预警/报警功能
火情预警/报警功能是基于多传感器融合技术和火情识别算法实现的。在巡检环境中,如电力机房,电力管廊中尤其常用。在轨道式巡检机器人搭载红外测温仪、温度、湿度、可燃气体浓度传感器和电火花传感器等。各类传感器在随机器人巡检的过程中实时采集数据信息。在机器人内部的控制电路中会集成各种识火情的算法,根据不同设置的阈值参数,比如可燃气体浓度值、浓度变化率、浓度时间参数等变量,再经过数学模型的计算分析最终判断出是否有火情发生或即将发生。如南京信息工程大学的张琛等人,对该类算法进行过深入的研究。
3.3 仪表读数功能
此功能多用于机房中查表使用,用于代替或辅助工作人员进行查表工作。这类轨道式巡检机器人的通常下方搭载有可以升降的云台,如图1-3所示。在程序的设定下,巡检机器人能在机房中周期性的自动查表,将仪表的图片、查表时间、读数打包除送给控制端。其中,查表的类型包括:电压表读数、电流表读数和闸刀开关状态等。而且,有的表的读数是指针式的,有的是数字式的。这些识别算法也有很多学者研究过,如重庆大学的张文杰等人可以基于OpenCV开发。
以上三种功能是目前是市场上比较流行的几种功能,还有例如:异物识别,故障诊断,语音对讲等,但是在一些条件下会被割舍或是由生产商提供选用。
4 轨道式巡检机器人的市场状况
如今,轨道式巡检机器人已经向地下管廊、矿井和监狱等处所蔓延。例如:合肥市信同信息科技有限公司的周界巡检机器人已经在某监狱成功使用,辅助武警在犯人集中区进行综合管制。
从市场占有上看,难以估算出各家单位在各领域的占有份额。但是,因为受当地政府各类支持和辅助推广政策,企业产业链,和企业其他相关资源等原因,大部分厂家所在省内是其销售的主要地域。而且,因为很多需方的技术要求是不一样的,所以各家的轨道式巡检机器人不能完全做成通用型产品。比如:有的是用于污水管道的,需要防潮性能高;有的是用于煤矿的,需要取得防爆认证。再如:在变电房巡检时,需要机器人产品具备查表功能,而同样产品用于边界巡防时不需要此功能。这就需要供货方在软件的某些功能上予以“开”、“闭”的调整[9-10]。
5 结论
我国轨道式巡检机器人的相关技术日益升级,应用面越来越广,从地面上的变电站巡检到城市地下综合管廊巡检,从监狱周界监控到机房查表,都有各式各样的产品被应用,这是人工智能技术在我国得到飞速发展的一个缩影。不能否认,轨道式巡检机器人已经逐渐被越来越多的领域关注和认可。我们相信在不久的将来,轨道式巡检机器人会更多 的出现在我们的生活中,它也为当今我国机器人市场带来了重要的商机。
[1] 鲁守银, 张营, 李建祥, 等. 移动机器人在高压变电站中的应用[J]. 高电压技术, 2017, 01(43):278-279.
[2] 裴文良, 周明静, 李军伟. 综合管廊智能巡检机器人的设计[J]. 制造业自动化, 2017, 01(39): 91-93.
[3] 张燕东, 田磊. 智能巡检机器人系统在火力发电行业的应用研发及示范[J]. 中国电力, 2017, 10(50): 01-03.
[4] 孟祥忠; 王保磊基于RFID的变电站巡检机器人无线充电系统的研究与设计[J]. 工业仪表与自动化装置, 2017, 06: 120-122.
[5] 张正培, 陈庆陆, 君杰, 等. 数据中心机房智能巡检机器人的设计探究[J]. 中国金融电脑, 2017, 02: 48-50.
[6] 论大数据对于人工智能发展的重要性[J]. 软件, 2017, 38(08): 67+83.
[7] 押宝人工智能富士康公布投资21亿元用于AI研发[J]. 软件, 2018, 39(02): 227.
[8] 裴文良, 张树生, 岑强, 等. 轨道式巡检机器人系统设计与应用[J]. 煤矿机械, 2016, 37(06): 142-144.
[9] 郭峰. 轨道式变电站设备巡检机器人的设计与应用[D]. 辽宁科技大学, 2016.
[10] 轨道式变电站巡检机器人投入试运行[J]. 机电工程技术, 2012, 41(02): 52.
Research and Development Status of Track Inspection Robot in China
WU Kai1, ZUO Zhao-lu1,2*, DOU Shao-xiao2,3
(1. Hefei Institute of Material Sciences, Chinese Academy of Sciences, Hefei, Anhui 230000; 2. Hefei Xintong Information Technology Co., Ltd., Hefei, Anhui 230000; 3. Linyi Dptech Environmental Protection Technology Co., Ltd., Linyi, Shandong 276100)
The track inspection robot has been developing rapidly in China, and its application range has been extended to underground mines, sewage corridors and urban comprehensive pipe corridors. This paper introduces the development of track inspection robots in China, classifies track inspection robots, summarizes the common functions of track inspection robots, and makes a comprehensive analysis of the market of track inspection robots in China. The purpose of this paper is to summarize the research and development status of China's track inspection robot, and make a summary and supplement to the previous research of many domestic scholars.
Domestic; Track; Inspection robot; Market
TP18
A
10.3969/j.issn.1003-6970.2018.11.019
2017年山东省第二批技术创新计划项目(项目编号:201720115071)
吴锴(1986-),男,硕士,研究方向:科技传播与科技政策;窦少校(1985-),男,本科,研究方向:企业管理,市场运维;左兆陆(1984-),男,研究生,研究方向:机器人技术、激光诱导荧光技术研究。
吴锴,左兆陆,窦少校. 我国轨道式巡检机器人研究及发展现状[J]. 软件,2018,39(11):80-83