ICESat/GLAS水面回波波形分析及判定
2018-12-19
(苏州建设交通高等职业技术学校,苏州 215104)
1 研究背景
2003年美国宇航局发射了携带地学激光测高系统GLAS (Geoscience Laser Altimeter System)的ICESat (Ice, Cloud, and Land Elevation Satellite) 卫星,其主要任务是对极地进行研究,并可提供全球海洋和陆地测高数据,近年来也有不少应用于湖泊、河流等内陆水体的水位变化监测的案例[1]。正确提取ICESat/GLAS在水面上的数据对于监测内陆水体变化以及海冰覆盖区域的海面高确定都有重要的意义,可以通过回波波形特征进行判别,例如Kwok等[2-4]根据反射率在北极海冰覆盖区辨别ICESat海面观测值,Wang等[5-6]则结合ICESat回波波形参数和测高数据得到了辨识内陆水体的有效方法。但是上述研究都是将回波波形特征与高程数据相结合进行判断,且没有考虑波形饱和以及大气前向散射对波形参数的影响。
本文将通过对水面回波波形特征的分析,在考虑系统误差的情况下,得到单独通过回波特征辨别平静水面的方法。
2 水面回波特征分析
激光测高仪是通过测量激光脉冲从卫星发射到地球表面经反射后返回接收机的传播时间进行测距的。对于GLAS系统发射的高斯型脉冲激光,经漫射面反射后应该仍然是高斯型的脉冲,只是回波的波形发生了变化。如果不考虑仪器状态、大气散射等误差影响,回波波形变化主要取决于反射面的物理性质,如反射率、粗糙度和高程分布等。
对于平静的水面来说,在没有严重的波形饱和与大气前向散射的情况下,返回的脉冲激光应该是一个比较理想的高斯型回波,并且由于水面具有反射率低、光滑、高程一致的特点,其回波通常表现为单波峰、低能量、低脉冲展宽的高斯波,并且相比于粗糙的地面回波具有更好的波形对称性和峰态。因此这些参数可以作为识别水面回波特征的参数。这些参数在ICESat产品中的参数名如表1所示,其中回波波形的反射率是由反射波和发射波能量的比值计算的,脉冲宽度则由i_SigBegOff和i_SigEndOff两项参数的差值进行计算[5]。

表1 ICESat回波识别参数Table 1 Parameters of ICESat for echo recognition
这些参数在一般情况下,都能表现出比较典型的特征,但在一些特殊情况下则会发生变化。例如,当GLAS接收到的脉冲回波振幅超过接收器所能探测的最大值时,回波的波峰顶端会被“削平”,全部按照探测最大值进行表示,导致估算的激光传播时间延迟,造成测高数据偏低[1]。这种现象被称为波形饱和,此时激光回波表现出过大的反射率(严重时可能会>1)和脉宽,并使波形后延迅速下降且产生震荡[2]。又如,严重的大气前向散射会减小回波的能量,使得反射面表现出过低的反射率[7],并造成回波波形产生“拖尾”现象,最终导致计算的回波接收时间延迟,测高值偏低。
对于上述2个主要的误差源,严重饱和波形可能引起1 m左右的误差,大气前向散射的影响则相对较小。ICESat数据产品提供了针对波形饱和的高程改正和能量改正,在波形饱和不严重的情况下可以很好地恢复高程数据,而对于大气前向散射,目前仍没有有效的手段对其进行改正。
3 数据分析
为对ICESat在水面的回波特性进行分析,本文选取了2003年2月至2009年10月期间ICESat在青海湖、兴凯湖和太湖上空获取的数据,如图1及表2所示。其中i_satElevCorr不可用的观测值已被剔除,这是因为在没有i_satElevCorr的情况下,无法得到正确的高程数据。

图1 数据分布示意图Fig.1 Spatial distribution of selected data

湖泊轨迹数观测值数青海湖4511 156兴凯湖2210 037太湖102 676总计7723 869
3.1 水面回波的波峰数和反射率
反射率是区分水面与其他类型表面的重要物理参数,在没有波形饱和和大气前向散射影响时,通过i_reflectUC可以有效地识别出水面。但是在容易发生镜面反射的平静水面上,波形饱和现象是很常见的[8],受波形饱和的影响,i_reflectUC会明显增大,甚至造成i_reflectUC无法计算。另外,严重的大气散射导致回波能量过低时也会使i_reflectUC无法计算。
如图2所示,本文选取了3个湖泊的GLAS回波反射率的分布情况进行统计,图中的NA表示i_reflectUC不可用,在3个湖泊的观测值中都占有一定的比例。因此,相比于直接将i_reflectUC作为识别水面回波的标准,本文更倾向于将反射率作为观测值分类的标准。

图2 水面回波脉反射率分布Fig.2 Distribution of reflectivity of received pulse from water
根据激光反射的特性,典型的水面回波的波峰数应为1。本文采用的23 869个水面观测值中,波峰数为1的观测值数量为23 774个,占总数的99.6%。
3.2 其他水面回波波形参数分析
图3展示了水面回波的脉冲宽度以及峰态、偏度随反射率的变化,图中横坐标NA1,NA2处分别表示因返回能量过低和波形饱和严重而造成的反射率i_reflectUC不可用的数据。
从图3(a)可以看出,大多数观测值都集中在6 m以内的脉冲宽度范围以及2以下的反射率范围,峰态主要分布在-2~4的区间,而偏度则集中在-1.5~1的区间内。
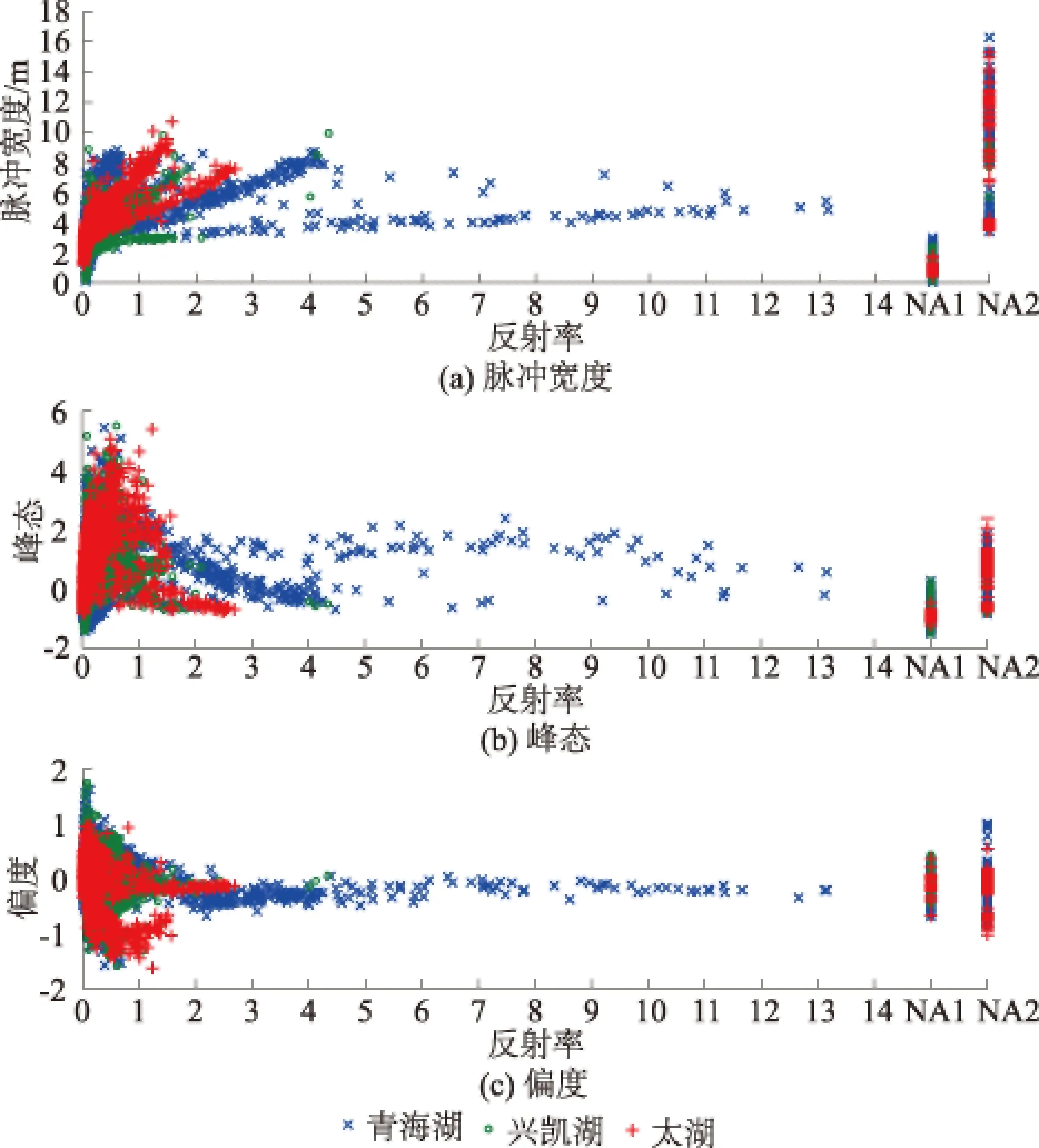
图3 水面回波脉冲宽度、波形峰态、偏度随反射率的变化Fig.3 Variations of pulse width, Kurtosis and skewness of received pulse against reflectivity
反射率较大的“异常”观测值,脉冲宽度也明显增大,而峰态和偏度则出现收敛的趋势。这是符合预期的,因为异常偏高的反射率主要是由于波形饱和引起的,因此使波形参数出现明显的系统性变化。波形饱和的直接影响是使回波波形顶端被“削平”,并使波形后延迅速下降,因而造成脉冲宽度增加、波形略向左偏(即偏度<0)以及峰态趋于一致。
当i_reflectUC不可用时,由于产生原因的不同,波形参数也明显表现出不同的特点。其中回波能量过低的情况下(NA1),由于过低的信噪比,大部分回波信号都被淹没在背景噪声中无法识别,因此识别出的波形的振幅和脉宽都非常小,波峰平坦(峰态较小)。波形饱和严重的情况下(NA2),波形参数的特征则与其他受波形饱和影响的波形特征类似,只是由于饱和程度更严重,造成数据分布的不确定性更高。
4 水面回波判定准则及实例检验
通过对青海湖、兴凯湖、太湖的数据进行分析,本文得到了如表3所示的判别水面回波的准则,该准则通过反射率和波形饱和能量改正的数值,将反射回波分为5类(由Ⅰ至Ⅴ反射波能量依次减弱),并给出了这5种情况下水面回波的脉冲宽度、峰态以及偏度的取值。以此为准则对本文选用的23 869个数据进行判别,结果显示有23 046个数据被判定为水面回波,即有96.55%的水面回波数据通过了检验,这说明这种判定方法较为准确,不会将过多的水面回波数据误判为非水面回波数据。
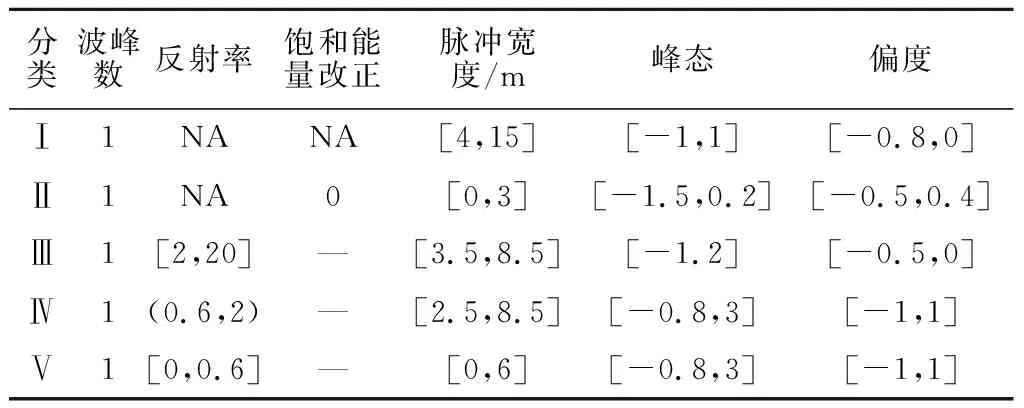
表3 水面回波波形判别准则Table 3 Criterion of identifying echo pulse from water
为进一步验证该准则对于其他地区水面的适用性,本文选取了ICESat经过美国苏必利尔湖上空的2条轨迹,如图4所示,时间分别为2004年5月18日(a)和6月2日(b)。
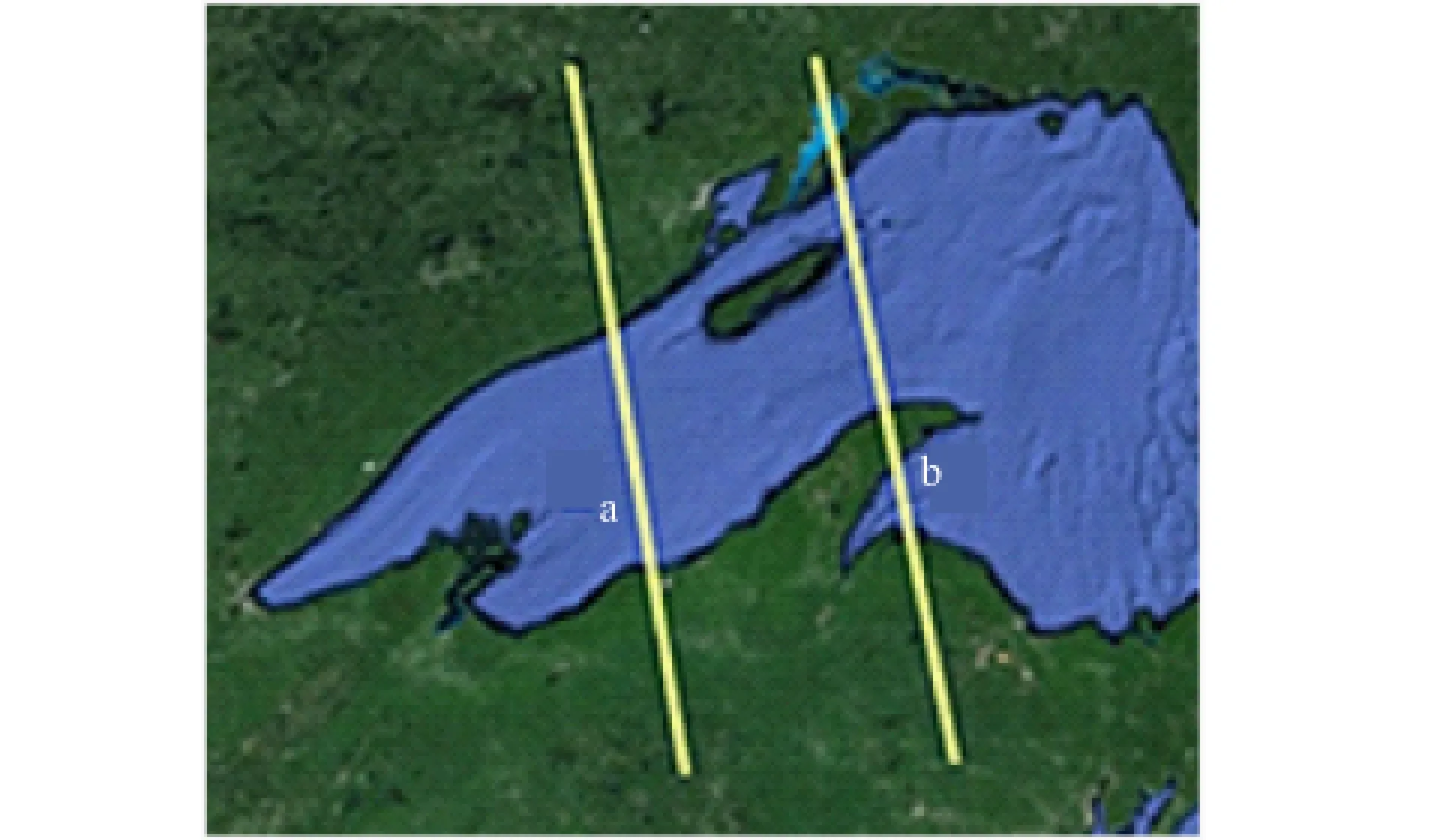
图4 用于测试水面识别方法的ICESat轨迹Fig.4 ICESat tracks for testing the method of identifying echo pulse from water
2条轨迹在陆地和湖面上的长度大致相等。轨迹a共包含1 577个观测值,其中苏必利尔湖面的观测值685个,且观测条件较好,湖面回波反射率均<0.3;轨迹b共包含1 884个观测值,其中苏必利尔湖面观测值873个,观测条件较差,陆地和水面观测值中均包含许多受波形饱和和大气前向散射影响的观测值。
用本文的方法对2条轨迹的观测值进行判断,结果如表4所示,其中Na,Nr,Ns分别表示用本文的方法判断出的回波总数、判断正确的水面回波数量和判断正确的苏必利尔湖回波数量,Nsu表示通过卫星影像确认的苏必利尔湖面的观测数量。
通过表4的结果可以看出:① 判断的成功率均在90%以上,仅有少量的陆地数据被错误地判断为水面回波数据,说明本文的判断准则是有效的;② Nr> Nsu是因为该地区周边分布着众多面积较小的湖泊和河流,这些水面回波也被正确地判断了出来,甚至一些仅有1个观测值的小湖泊和河流也识别了出来(文中未给出),这为我们从ICESat的海量数据中搜寻小面积水体的观测值提供了可能。

表4 水面波形识别结果统计Table 4 Statistic of result of identifying echo pulsefrom water
5 结 语
通过对水面上ICESat回波波形特征的分析,本文得到了辨别水面回波的有效方法,根据不同区域的试验结果,该方法对于平静水面上的观测值识别正确率在90%以上,且具有很高的准确率。
这种方法的特点是不依赖于高程的判断,并且考虑了波形饱和以及大气前向散射对于波形特征的影响,因此在小面积水体的辨别上具有一定的优势,可以为内陆水体监测提供有效的支持和帮助。
海冰区的海水同样具有面积小的特点,因此本文的方法可能对于在ICESat海冰数据中寻找海面测高数据具有一定帮助,但是由于海冰表面物理性质与陆地不同,具体方法有待进一步研究。
