触发式测头预行程误差分析与建模
2018-12-19马鞍山市特种设备监督检验中心王传生韩建彬
马鞍山市特种设备监督检验中心□王传生 韩建彬
安 徽 工 业 大 学□冯旭刚 章家岩
1 引言
触发式测头系统是三坐标测量机中使用最多的测量系统,广泛地应用于精密测量领域,但是触发式机构中各类误差源依旧给工件的精密检测带来较大困扰。Butler等人的研究表明测头预行程误差在测量整体误差中的比重高达60%,并且测头系统的触发精度直接受到预行程变化的影响。触发式测头中测杆长度和触发力大小直接影响着预行程大小,测杆长度越长产生的预行程越大,触发力增加预行程也会增加,通过对触发力进行理论分析和计算,可定性得出触发力对预行程的影响。然而,预行程影响因素众多,例如测杆旋转位移、测杆弯曲变形位移、测头变形位移等,为深入分析各项因素对预行程的影响,精确计算触发式测头预行程,有必要对触发式测头预行程中各项因素进行深入研究。
2 触发式测头
触发式测头工作原理等价于一个零位发讯式开关,具有结构简单,工作可靠,测量快速,价格低廉等特点,至今仍广泛应用于精密测量领域。触发式测头结构如图1所示。图中六个钢球与相隔120°圆柱体构成接触副,三个接触副构成一个电回路,安装在测座上的测头在弹簧力的作用下使三个接触副完全接触。三坐标测量机对待测工件进行测量,测头接触到待测件时不会立即触发测量信号,测头在测量方向上持续受力,当受力大于弹簧预紧力时,至少一个接触副脱开时发出阶跃信号,光栅记录测量信息,完成一次测量,测头经由弹簧复位。
触发式测头触发机构可近似看成两关节机构,理论上具有五个自由度,接触副为上部关节提供两个自由度,使测头能够完成120°角度测量,测杆为下部关节,具有X、Y方向及Z轴正方向三个自由度,因此可以完成XY平面任意方向及Z轴正方向的测量,但其测量精度也会受到机构特性制约,如测杆长度、弹簧预紧力、触发力方向等。
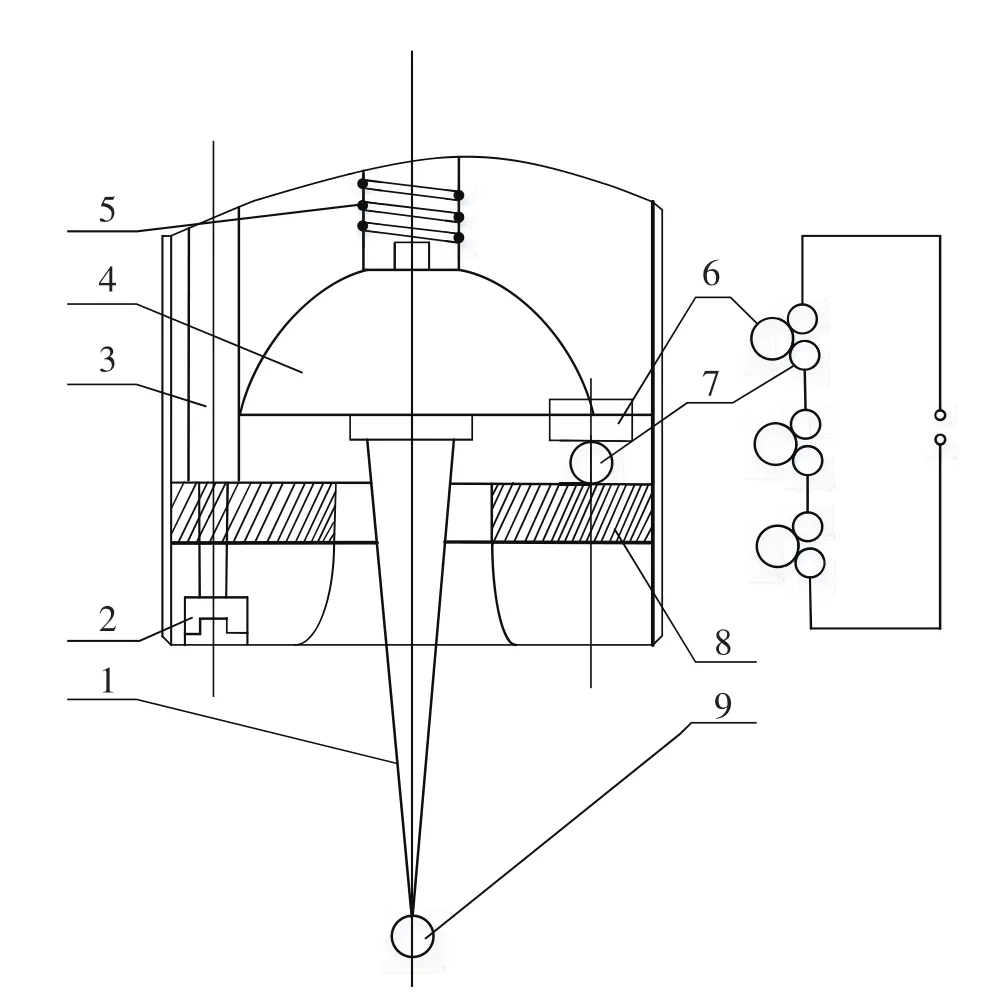
图1 触发式测头结构简图
触发式测头探测待测件过程中测头从接触待测件到触发测量信号这段时间内的行走距离称为预行程,对被测工件进行测量时,触发机构中的弹簧预紧力大小、触发方向会使测杆、测头发生刚性与角度偏移,从而产生预行程误差。预行程误差是影响三坐标测量机动态测量精度的关键误差源,由于测量过程中预行程误差是不断变化的,有必要对触发式测量机构进行受力分析,围绕各项误差因素建立数学模型,做到对误差源的定量分析,为预行程误差补偿奠定基础。
3 触发机构受力分析
触发式测头测量待测件时受力如图2所示。A、B、C为三个接触副形成三脚架,对称分布在测头座周边,以测杆为Z轴,垂直于测杆平面为XY平面,与向量OA轴平行且以OA方向X轴为正方向,以此建立笛卡尔空间坐标系 (xyz,i,j,k为方向向量)。忽略测杆自重对其长度的影响,测杆固定长度为L,弹簧预紧力Fs作用于测头座中心点,方向与Z轴重合,F(θ,φ)为测头探测待测物表面时的作用力,θ为方位角,φ为极角,此作用力的单位向量nF可表示为:

当触发力F(θ,φ)大于弹簧预紧力时,接触副B、C沿轴BC旋转同时接触副A脱离,触发探测信号,光栅系统记录此时测量位置。因此,触发式测头在测量待测物时的预行程误差既包含了测头旋转位移又含有测杆弯曲位移导致的形位误差。由于三个接触副对称分布,为使研究具有代表性,本文探究接触副A脱离时的受力过程。
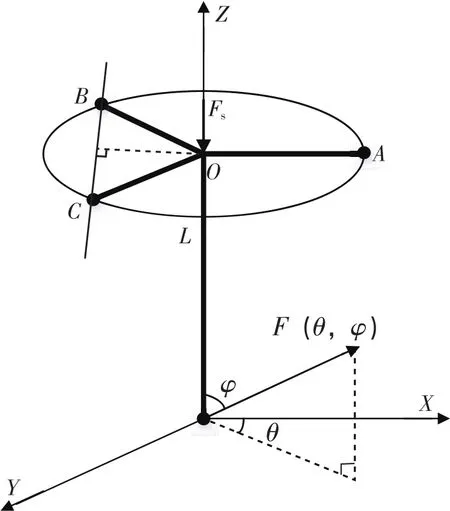
图2 触发式测头受力图
(1)测杆旋转位移误差
假设测头在接触到被测物到触发测量信号期间不存在测杆变形、测头与待测物表面发生滑动摩擦等其他外界干扰情况下,测头行走的距离称为测杆旋转位移,旋转位移简图如图3所示。
图中φ为测杆旋转角度,L′为三脚架中心到轴BC的距离,R为旋转半径,由此形成的旋转位移为d,即:

带入笛卡尔坐标系中位移向量d可表示为:


图3 测杆旋转位移简图
F(θ,φ)为测头探测待测件时的接触力,根据测杆旋转位移简图可建立力矩平衡等式:
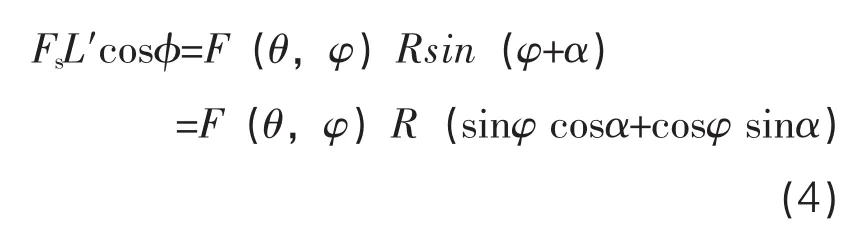
式中 cosα=L/R, sinα=L′/R, 且旋转角度 φ特别的小,约为0,则可得:

(2)测杆弯曲位移误差
实际测量中,测杆会在接触力F(θ,φ)的作用下发生弯曲变形,从而在测量待测件时会引入弯曲位移误差,测杆弯曲变形简图如图4所示。

图4 测杆弯曲变形简图
为便于分析可将接触力F(θ,φ)分解为横向和纵向力,分别为F1,F2,测杆弯曲变形位移b同理分解为b1,b2,。图中L为测杆长度,D为测杆直径,根据材料力学中胡克定律可得:
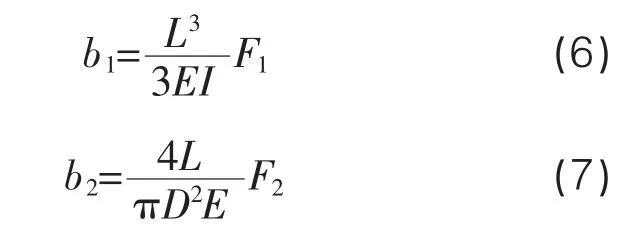
式中E为测杆的弹性模量,I为转动惯量。因 F1=F (θ, φ) sinφ, F2=F (θ, φ) cosφ, 可得:

(3)测头接触变形误差
当测头测量待测件时,测头会因接触力的作用下产生畸变,从而测量结果会引入测头变形误差s。
式中E1,E2分别为红宝石测头和待测工件的弹性模量,v1,v2分别为它们的泊松比,R1,R2分别为测头半径和待测工件表面曲率半径,若待测工件表面为平面,则R2趋近于正无穷。
4 预行程函数
通过以上分析可得到预行程:P=d+b+s,即根据公式 (2), (5), (8), (9) 可得:
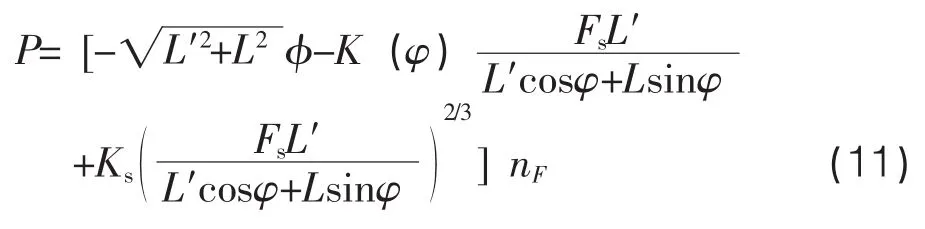
公式 (11)即为触发瞬间预行程函数模型,实验中红宝石测头弹性模量E1为150Pa,泊松比 v1为 0.1,待测工件弹性模量 E2为220Pa,泊松比v2为0.285,测杆转动惯量I为0.0000000125 (m·kg·s2),弹簧预紧力 Fs=0.5N, D=0.002m,L′=0.02m, L=0.05m, 则仿真结果如表1所示。
由预行程函数得出的仿真结果可看出,在相同角度下测量时,测杆的弯曲位移误差则在预行程误差中占据较大比重;当测头从不同方向测量同一被测物时得到不同的数据,此特性被称为触发式测头预行程的各向异性。
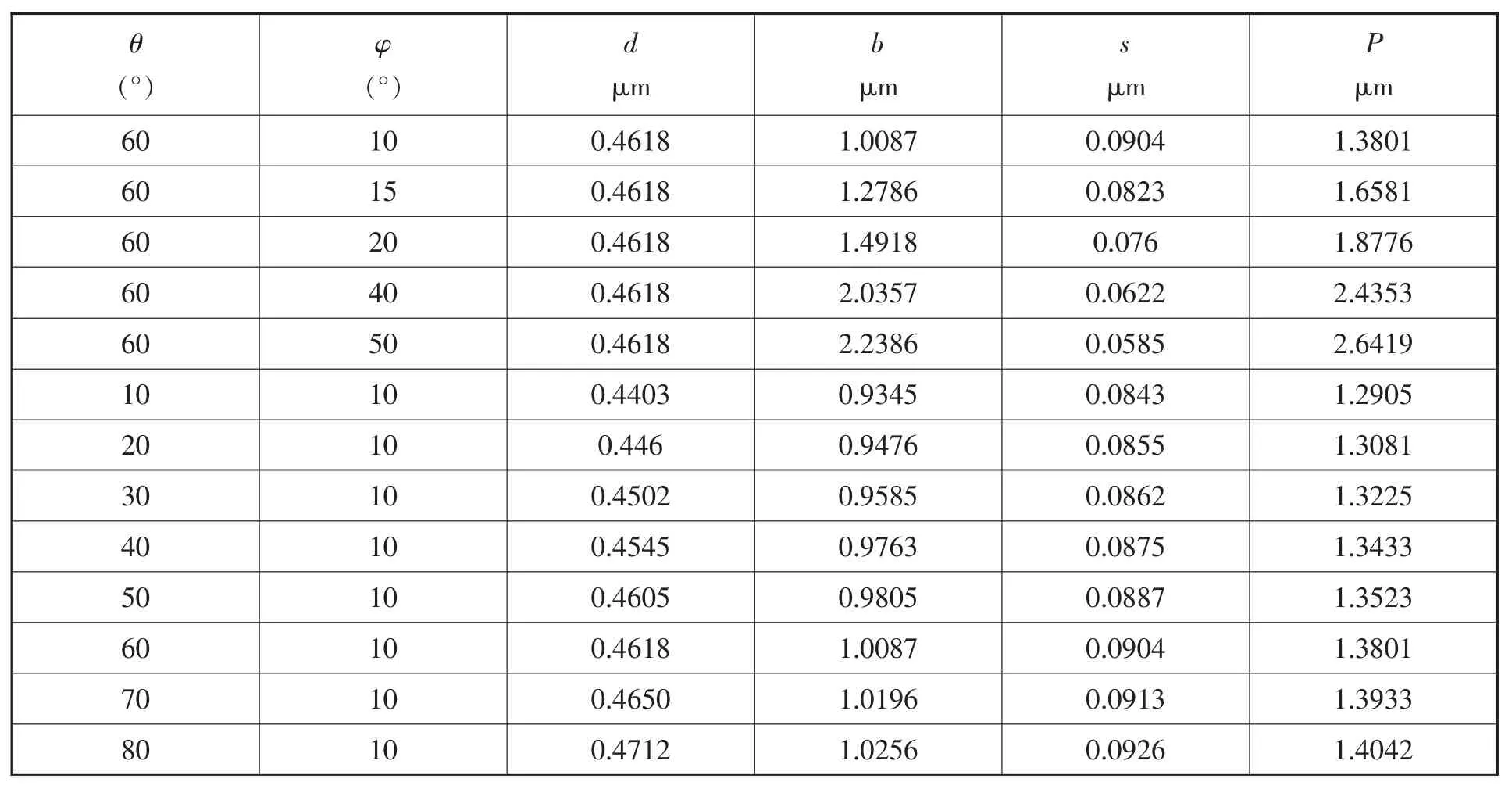
表1 预行程仿真结果
5 总结
接触式测头结构受力分析得出了预行程数学模型,对预行程误差补偿具有重要的意义,但同时预行程还会受到测头运行速度、触发力等影响,为得到更加精确的数学模型还需对触发式测头进一步研究。
