机场节点失效下的航空器备降场规划*
2018-12-19吴明功蒋旭瑞温祥西聂党民涂从良
吴明功,蒋旭瑞,温祥西,聂党民,涂从良
(空军工程大学空管领航学院,西安 710051)
0 引言
在当前世界总体形势稳定、局部冲突不断的背景下,机场由于自然灾害或战争引起非正常运行的现象在全球已逐渐普遍。如果重要节点失效,又不能有效调节网络的运行,就容易导致局部甚至整个网络的级联失效。这对于当地的政治经济稳定影响较大,并且制约了地区发展。因此,在节点失效的情况下,如何合理进行流量规划,选择合适的备降场具有重要的研究意义。
目前,在复杂网络领域,对网络的负载重分配问题研究较为广泛。文献[1-2]提出了最近邻负荷再分配策略,当网络中某一节点发生故障,故障节点的负荷会分配给与其直接相连的节点。文献[3]构建了一个可调负荷区域的模型,节点发生故障后会把自身负荷分配给以自身为中心的一个区域内,区域的大小是可以调节的。并且调节区域大小,能够改变网络的鲁棒性。以上文献虽涉及到负荷的重分配,但对每个节点分配负荷的数量以及原则没有阐述清楚。对于这些缺陷,Yang等[4]提出了一种基于度的节点处理能力分配策略,其中总的节点处理能力是固定的,每个节点分配到的处理能力与节点的度成比例。Cao等[5]设计了一种动态的自适应的节点处理能力分配机制,每个节点的处理能力与这个节点所接收到的数据包的个数成比例。文献[6]提出了两种模型,在这两种模型中,每个节点的处理能力分别根据节点的度和介数来分配。文献[7]结合网络节点负载实时动态信息,提出了一种负载动态重分配策略,根据节点的度与节点实时处理效率计算节点的权重,按节点权重从高到低的排序进行负载分配,同时选取一定比例的失效节点暂停工作,待其功能恢复后自行处理负载。这些研究虽然比较细致地描述了负载分配机制,但在分配的时候只是考虑了网络中节点的基本性质,缺乏对实际网络中节点特点的数学抽象化。在航空学界,学者对于备降机场的选择也具有一定的研究。文献[8]分析了备降机场最低天气标准的意义,提出了可选备降机场的概念,对选择备降机场的安全可行性做出了说明,但是缺乏定量分析。文献[9]针对大型枢纽机场到场航班的备降场分配问题,以备降总时间最小为优化目标,提出基于线性规划的备降场分配模型,该文献虽然对问题进行了数学模型分析,但是优化目标单一,因此,缺乏准确性。
在以往研究的基础上,为解决传统方法泛化和优化目标单一的局限,本文基于航空实际,考虑了机型、航空器位置、节点容量、机场配置、航线密度等众多因素与代价之间的关系,从距离与空中相撞风险两方面的代价入手,进行数学分析建模,确定两个优化目标,最后通过基于递变权重系数的蝙蝠算法进行求解。
1 问题描述
航空网络节点失效后航空器备降场规划的实质是:根据航空器的类型,以及航空器在航线中所处位置,科学地计算选择某机场节点所需要产生的代价,通过合理规划航空器的备降场,使网络总代价最小化。首先要区分所要进行规划的是多个对象还是单个对象,单个对象即一架航空器的备降机场选择只需要计算对所有可选机场的代价,然后比较就可以决策,而多个对象即多架航空器的备降机场选择考虑的是全局而不是局部的代价,本文针对的是多个对象。其次要确定计算哪些方面的代价,每种代价的重要度以及需要考虑的因素。下面提出解决方法的具体过程。
2 航空器分配优化模型构建
2.1 基本假设
本文的理论基础是复杂网络[10],因此,需要构建航空网络拓扑模型,考虑到航空数据的特性,对实际航空系统作如下假定:
1)拓扑模型中的节点vi表示全国所有具有运输能力的通用机场,确定为集合,其数量为。边ej表示机场与机场之间的运输关系即航空线路。若两机场存在航线,则认为有边相连,否则无边。集合为边的集合,其数量为。
2)为简化计算,设飞行路径为航线,且航线均为直线,求解时只考虑直线距离。
3)航空网络中,航线是单一的,两个机场之间最多存在一条边相连。视网络为无向网络,将航线往来飞行流量作为边权。
2.2 原理分析
选择备份机场有两方面的考虑,一是距离代价,二是空中相撞风险代价,因此,这是一个多目标优化问题。
2.2.1 距离代价分析
首先分析选择备份机场时的距离代价。在实际中,当目标机场因失效不能降落时,在其他可选的几个备降机场中,航空器往往就近选择降落机场来减小油耗和飞行时间,这是由于其考虑了距离代价因素。对于载油量较小的航空器来说,飞行距离的增加,不仅仅产生一定的经济费用,还会造成潜在的安全风险。因此,在计算航空器选择备降机场的距离代价时,要考虑机型、已飞行距离,分析它们的内在联系。例如,近程运输机的距离代价相对较大,已飞行距离较远的距离代价相对较大。为此,我们进行以下分析。

图1 某区域机场节点
以图1为例,航空器从A机场飞往B机场,飞行中途B机场失效,不能承担降落任务。设A到B机场的距离为,A到C的距离为夹角为θ,已飞行距离为d,此时航空器若选择C作为备降机场,则剩余的飞行距离d'为

在设置距离代价目标函数时,要考虑航空运输中的两个实际问题。1)当剩余飞行距离d'与已飞行距离d在较小范围内变化时,每单位距离的代价相对较小;当d'与d增大到一定程度时,每单位距离的代价急剧增加。2)近程、中程、远程航空器的载油量存在差异,载油量小的航空器对距离比较敏感,距离代价随着载油量的增加而减小。为此,设当架航空器选择节点vi作为备降机场时,距离代价Pdi为:

距离总代价为:

式中,Pdi是关于剩余飞行距离d'的指数函数以及d的幂函数,符合随着d'与d增大时,Pdi增加越快的现实。xik是以节点vi为备降场的k型航空器数量,μk是机型参数,不同机型参数会有差异,例如,载油量小的航空器的μk值较大,载油量大的飞机μk较小,这体现了载油量小的航空器距离代价大的现实。将航空器按航程分类,给定μk值,如表1,其中,近程的航空器航程一般小于1 000 km,中程为3 000 km左右,远程为11 000 km左右。

表1 各型航空器μ值
2.2.2 空中相撞风险代价分析
按区域划分,可以将航空器空中相撞风险分为终端区(节点区域)和航线区域碰撞风险。
节点区域的航空器空中相撞风险:在节点区域内影响空中相撞风险的因素主要有两方面:一是节点容量,二是机场节点各方面的配置水平。
每个机场节点都存在节点容量Ci,当航空器数量xi超过容量Ci,即xi≥Ci时,发生空中相撞事故概率就会大大增加。一般来说,业务繁忙的枢纽机场的容量Ci相对于其他机场来说较大。这里,用点强Si来描述机场的繁忙程度,

点强Si是与节点vi直接相连的边权wij之和,飞行流量越大,点强越大,机场也就越繁忙。

可以看出,Si越大,越大。为容量控制系数,根据实际一般取。可以看到,随着航空器数量的增加,节点可增加容量不断减小,而且减小速度越来越快,这比较符合航空网络的现实。

式中,ki是节点度。随着分配的航空器数量增加,风险i增加得越来越快,可增加容量越小,风险越大。
此外,机场节点人员、设备、环境和管理的水平也是影响碰撞风险的重要因素。将这个水平量化为数值,

式中,φ是各个因素所占权重, 分别代表每个因素的水平。因此,节点vi区域的风险构建为:

总风险为:

根据机场在这些方面配置的水平,将机场分为4个等级,如表2:
表2 机场值

表2 机场值
Ⅳ级0.2等级 Ⅰ级 Ⅱ级值 0.8 0.6Ⅲ级0.4
航线区域碰撞风险代价:只有当两机在水平面和垂直方向都同时发生重叠时,在交叉航路飞行的两架飞机才会发生碰撞。为了简化计算,设两机在水平面发生重叠的概率h,在垂直方向上发生重叠的概率是v,则两机在交叉航路发生碰撞的概率是vh。那么可以得到,如果选择节点vi为备降机场,则碰撞风险roei为:

总风险为:

式中,wj是被穿越航线j的边权,也就是航线上的飞机密度。于是,空中相撞的总风险代价R为:

式中,ρ是调节节点风险和航线风险比重的参数,ρ越大,节点区域风险代价所占比重越大。
3 模型求解
根据以上模型可以发现,该问题是一个多目标优化问题,具有非线性的特点,传统的数学规划算法已经不能有效解决。决策变量维度和计算复杂度相对较高,为此,选用多维多目标的蝙蝠算法[11]进行问题求解。
为了解决多目标问题目标函数之间容易冲突,权重设置不合理等问题,选用基于递变权重系数的蝙蝠算法。蝙蝠算法可以将多目标问题转换为单目标再进行求解,在每次循环迭代中给各个目标函数赋予不同的权值,求解目标函数,最后得到一组Pareto最优解。
3.1 蝙蝠算法
蝙蝠算法(BA)是由英国剑桥大学Xin-She Yang教授于2010年提出的启发式算法,协调了局部搜索和全局搜索。该算法有3个假设:1)蝙蝠均以声波回声探测距离,并区分障碍物与猎物;2)蝙蝠根据与猎物之间的距离自动调整声波的波长和频率;3)蝙蝠发出的声波响度具有最大和最小临界值。

其中,fmax和fmin分别表示声波频率的最大值和最小值;β 服从均匀分布,是[0,1]间的随机数;lb是当前种群的全局最优解。同时,在已有最优解集后,随机选择其中一个解作为当前的最优解lp,对其随机扰动,获得一个新的解lnew,更新的公式为:

其中,ε 是[0,1]的 g维随机向量;At为 t代所有蝙蝠响度的平均值。

蝙蝠刚出发时,响度最大而脉冲速率最小,当蝙蝠探测到猎物之后,在飞向猎物的过程中,响度逐渐减小而脉冲发射率不断增大。在算法中,响度A(i)和脉冲速率R(i)会不断迭代更新,其规律为:

在搜寻猎物的过程中,蝙蝠群体经历了一个从盲目搜索到有序前进的过程,所有的蝙蝠都通过逐渐调整声波频率、响度和脉冲速率来跟随当前适应度最优的蝙蝠。基本流程图如图2所示。

图2 算法流程
算法的实施步骤为:
Step2寻找当前最优解,计算其适应度值f(lb);
Step3主循环,按式(13)~ 式(15)中分别更新蝙蝠的当前位置和速度,如果,则随机一个最优解加以扰动,进行局部搜索。如果获得的新解的适应度值,,则接受这个新的解,蝙蝠更新飞行方向。
Step5重新评估找出最佳的蝙蝠个体所处的位置和速度;
Step6如果达到算法终止条件则输出最优蝙蝠个体和全局最优解。否则,进入step4,继续搜索。
4 仿真实验与分析
下面如图3所示。对本文提出的方法进行仿真实验,以北京——上海航线为例,共20个机场,航空器由北京首都机场飞往上海浦东机场,在目的机场失效的情况下,航空器选择除出发、目的机场以外的18个机场作为备降场。
实验参数设置如下:航空器数量50架,其中,近程10架、中程30架、远程10架。航空器的位置在航线上随机分布。各个机场的人员、设备、环境和管理水平通过收集相关资料以及专家评估进行统计,并进行数据处理。垂直相撞概率v设为1.886×10-7,水平相撞概率h设为1.52×10-6。机场间有定期航班则认为机场相连,航班数为边的权重。容量控制系数ψ设为2,ρ设为0.5。

图3 “北京-上海”航线示意图
问题的决策变量是各个备降机场节点所接受的各类航空器数量,如为近程航空器在18个机场的分配方案,X2,X3分别是中程和远程航空器的分配方案。为了适应蝙蝠算法,将3类航空器的分配方案进行编码,作为一个蝙蝠个体,于是每个蝙蝠个体设为一个54维的向量,1~18维是 X1,19~36 维是 X2,37~54 维是 X3。种群数量设置为30,迭代次数设为400,算法的独立运行次数为10。在使用递变权重系数法时,对距离目标函数的权值ξ1递增,即对相撞风险目标函数的权值ξ2递减,且ξ1+ξ2=1。实验中,各型航空器的位置随机产生,在航线上均匀分布,如图4所示。

图4 航空器位置分布图
实验得出距离代价和空中相撞风险代价随着距离目标函数权值ξ1在[0.1,0.9]区间变化的曲线图,如图5所示。
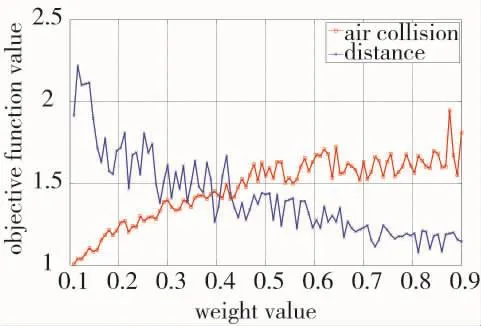
图5 代价变化曲线
从图5可以看出,两个目标函数值随着权值ξ1的增加,分别缓慢上升和下降。当算法偏好其中一个目标时,此目标函数值相对较小且稳定,最优解也就倾向于减小此代价,而另外一个目标函数值相对较大,且不稳定,说明该算法具有可调节性。为了说明问题,取ξ1=0.35,ξ1=0.75时得到2个最优解,如下页表3所示。
从表3中可以看出,航空器在各个机场的分布比较均匀,说明实验参数设计的较为合理。随着ξ1由0.35变为0.75,可以看出将邻近航线的机场作为备降机场的航空器明显增多,说明算法将侧重点由降低空中相撞风险代价向降低距离代价进行了转移。
对于杭州、南京、宁波、石家庄、济宁、邯郸、秦皇岛这几个距离航线较远的机场节点来说,远程和中程航空器选择这些机场节点作为备降场的数量比近程航空器明显较多,这说明模型对不同类型航空器的距离代价有所区分,近程航空器的距离代价比中远程航空器大。为了比较蝙蝠算法与其他优化算法的效果,应用粒子群算法和遗传算法进行求解,下页图6是3种方法非支配解的分布。
对比3种方法可以看到,蝙蝠算法与另外两种方法相比,具有明显优势,对它们具有支配作用。此外,粒子群算法略优于遗传算法。
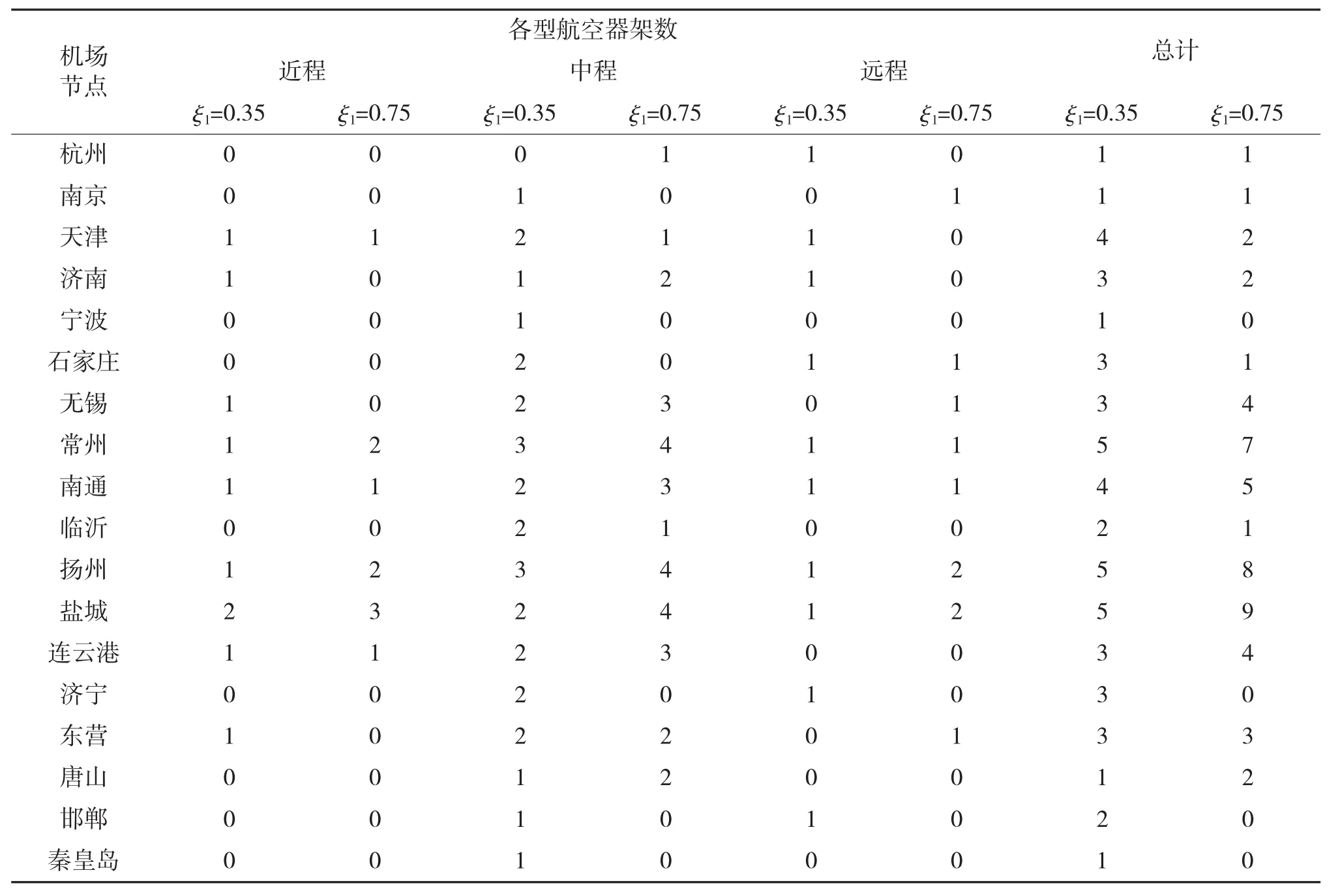
表3 航空器架数分布数量
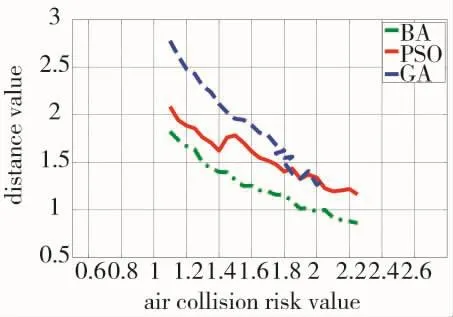
图6 非支配解分布曲线
5 结论
本文针对机场节点失效的突发情况,建立了航空器分配优化模型,从距离和空中相撞风险两方面分析了航空器选择备降机场时所花代价,并采用蝙蝠算法进行求解。在实际应用中,可以根据现实情况特点,设定权值 ξ1、ξ2,来反映对距离或空中相撞风险一方的重视程度。下一步的研究重点是在多个机场节点失效的情况下,怎样对航空器的备降场进行规划。
