基于云计算的城市智能交通控制系统的构建与应用
2018-12-18王刚王春霖戴嘉鹏李燕炜张素贞黄翔
王刚,王春霖,戴嘉鹏,李燕炜,张素贞,黄翔
基于云计算的城市智能交通控制系统的构建与应用
王刚,王春霖,戴嘉鹏,李燕炜,张素贞,黄翔
(天津职业技术师范大学 机械工程学院,天津 300222)
当今社会,严重的交通拥堵是阻碍社会发展的主要原因之一。但中国现有城市交通系统已经基本完成,不可能作出重大调整。通过结合当下快速发展的云计算及智能算法,对原有交通控制系统进行优化和改进。此系统将从两个方面入手来优化城市的交通系统,一方面建立智能信号灯装置对城市交通情况进行梳理,从而大大改善各路口的拥挤;另一方面以云端数据为基础对车载移动端用户进行实时的交通路线制定,合理地分配城市交通资源。
交通拥堵;云计算;交通控制系统;云端数据
我国经济正在蓬勃发展,可城市交通这条经济大动脉拥堵问题却有待解决。众多城市的交通路口出现了汽车“蜗牛行”的现象,突发情况时更混乱不堪,不仅造成了能源的极度浪费,还影响民众出行,限制了地区经济的飞速发展。基于云计算的城市智能交通控制系统的构建与应用便是为解决这一难题而提出的。
1 系统概述
基于云计算的城市智能交通控制系统,由交通信号智能转变一体机和云计算控制系统两大部分组成。交通信号智能转换一体机是通过视觉检测系统对需通过路口车辆的数量进行检测并将信号传输至中央处理器,处理器根据检测到的数据实时改变交通信号的时间配比。
各交通路口的分级状态数据会实时同步到云计算控制系统的数据库中;云计算控制系统调用数据,通过综合计算定制最优行车方案,反馈至用户的车载客户端,实现动态疏导城市交通流;通过智能交通控制以及实时动态传输改变车辆行驶路线来规避拥堵路段的双重手段,实现对城市拥堵路段的疏通、引导、分流,以达到确保交通安全与通行顺畅的目的。其系统流程如图1所示。
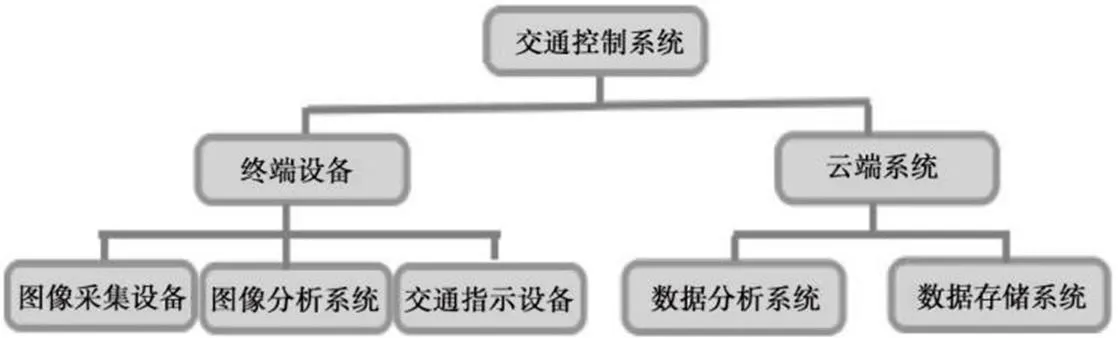
图1 城市智能交通控制系统流程图
2 车辆通过路口原理概述
为便于计算车辆通行效率,应将通过路口车辆进行整理分批。
2.1 车队“打包”原理
车队打包原理是对通过路口的红灯车进行积压整理,将要通过路口的车辆之间的间距减小使之成为车辆密度较大的车队。交通信号最佳工作条件是把交通车流分配为一个个车队,即对车队进行打包,使车辆分批次通过路口,车队打包式的通行原理将使绿灯时间的使用率大幅提升。
2.2 绿灯通行效率
绿灯时间的使用效率即路口在绿灯可通行的状态下,尽可能使所要通行的车辆高效通行。
效率值1计算公式为:
1=[-()]/. (1)
式(1)中:为绿灯时利用的时间;为大于或小于标准车距的时间。
浪费时间计算方式为:
==-. (2)
式(2)中:为实际车间距;为标准车间距。
饱和度计算方式为:
=´/. (3)
式(3)中:为饱和度,指车辆通过所使用的有效时间与绿灯的显示时间之比;´为车辆通过所使用的有效时间;为绿灯所显示的时间。
车辆通过所使用的有效时间´计算方式为:
´=-(-). (4)
式(4)中:为绿灯时,停止线上无车通过;为当交通流正常停止至剖面线前时,两辆车前后之间的空档距离;为必不可少空档个数。
3 交通信号智能转换一体机
交通信号智能转换一体机是基于云计算的城市智能交通系统的硬件核心,它通过动态改变城市交通信号来进行车辆的疏导,其功能的实现主要基于两大模块。用于检测车流量的视觉检测系统及进行交通信号动态转换的信号灯智能控制系统,具体如图2所示。
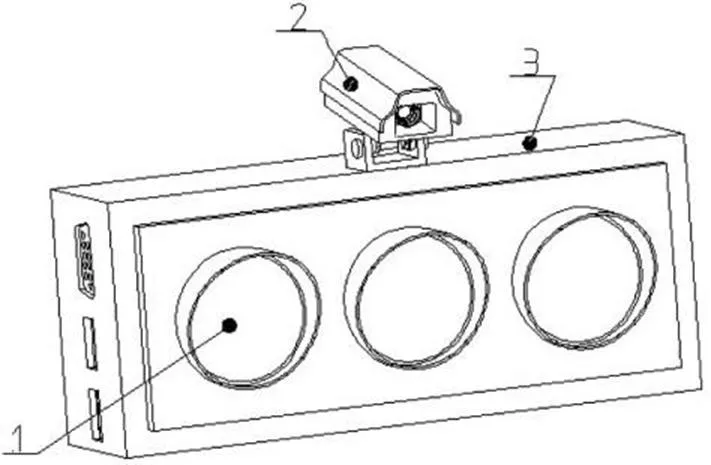
1—交通信号灯;2—转角摄像机;3—数据转换控制箱。
3.1 视觉检测系统
车辆的数量检测装置是城市智能交通控制系统硬件基础。目前,检测车流量方法有多种,例如超声波车流信息检测法、感应电磁装置法及地磁线圈检测装置等。视觉检测系统相较于其他车辆检测系统,具有检测范围广、检测精度高、信息全面、能实时状态修补等优点。
车辆视觉检测系统由摄像机、图像分析处理装置组成。红灯车辆等待期间摄像机进行拍摄,图像处理装置对实时拍摄图片进行特征捕捉,现设定特征为机动车车牌照,通过所捕捉到的车牌照数量及分布情况界定车队长度。检测信息保存并进入下一个检测循环。
3.2 信号灯智能控制系统
3.2.1 通行时长设定
假设车队有辆汽车组成,都静止不动,如图3所示,第1辆车位置在B 点,第辆汽车的位置在坐标轴原点O.汽车的长度假设为,单位为m;汽车距离为,单位为m。设第一辆车的静止启动后的匀加速度为,单位为m/s。

图3 通行时长设定
当汽车匀速行驶时速度为1,单位为m/s;从静止启动到达到匀速行驶所用的时间1,单位为s;第1辆车在这一过程所行驶的总距离1,分别乘加速时间和加速距离。设司机跟随启动所用时间,单位为s。第一辆车发动后其余的车辆也随着发动,当第辆车也进行加速且速度也达到1时,所有车辆进行启动。相邻的两辆车的距离由计算可得:(1)=×.假设的运动情况如图4所示。由图4可知,首辆车的行驶距离称为启动距离1;行驶所用的时间称为启动时间,记为1。由两运动简图可得,从B点由静态到B1点匀速行驶所行驶距离为:
=1=(-1)×(1)++1-[+(-1)]
=(-1)×[(1)-]+1
=(-1)×(1-)+1(1).
从而得出车队的启动时间为:
=(1-1)/1+1
=[(-1)×(1-)]/1+1.
根据调研多数十字路口的数据区与时间计算相符的情况设定交通灯时间为5个阶段,分别为10 s、25 s、50 s、 90 s、120 s。

图4 运动简图
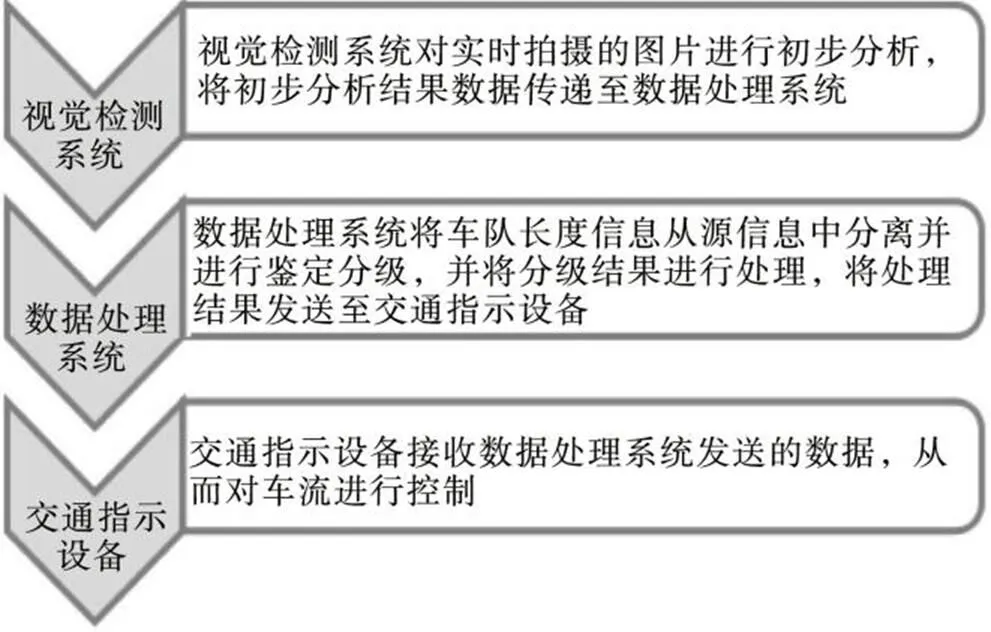
图5 信号转换设计

图6 行车方案动态变化方法
3.2.2 信号转换设计
车辆视觉检测系统将已经处理的图像数据传递至终端,数据处理系统进行进一步分析,数据处理系统将车队长度信息从源信息中分离并进行鉴定分级,并将分级结果进行处理,数据处理完成后将处理结果发送至交通指示设备,从而对车流进行控制。
4 基于云计算的动态行驶方案的制定
4.1 路口交通状况评级
云计算控制系统通过获取采集点上传至数据库中的数据对路口交通状况进行评级,十字路口交通状况评级根据该路口近5次车流量的平均值,计算出来的数值分为A0,A1,A2,A3,A4等不同的等级,A0代表道路非常畅通;A3较为拥挤;A4代表道路无法通行或者该路段发生交通事故。
4.2 普通车辆动态行驶方案定制
车辆最佳行驶路线即城市交通网络网中起点与终点之间最畅通的路线。由于交通网络中各路段的交通状况是实时变化的,所以最佳的行驶路线也是实时改变的,因此,我们提出行车方案动态变化的方法,即途中行驶路线动态调整的方案。云计算控制系统根据用户在车载客户端所输入的目的地以及自动获取用户的地理位置,首先定制出地理上的最短路线,通过调取采集点上传到数据库中的实时交通数据,云计算会自动更改行车方案以避让拥堵路段,具体实现方法如图6所示。
5 结束语
城市交通系统随着科技的进步不断地更新换代,随着信息化时代的来临,城市交通控制系统必然会迈入智能化时代。未来,城市交通控制系统将不再单纯指挥车辆和行人的通行,还将结合新技术如互联网和云计算用以对城市交通进行调节、诱导、分流,以保障交通安全与畅通,并收集城市交通数据,利用大数据对城市交通状况进行预测,为智能化汽车甚至无人驾驶汽车提供重要数据。
[1]王婷,基于视觉传感技术的智能交通信号控制系统研究[D].兰州:兰州理工大学,2018.
[2]李排昌,马社强.车队启动时间与路口放行时间研究[J].中国人民公安大学学报(自然科学版),2012(3):63-64.
[3]杨兆升,李全喜.基于城市交通控制系统的动态车辆行驶路线选择的方法[J].公路交通科技,1999,16(1):33-36.
2095-6835(2018)23-0146-02
U495
A
10.15913/j.cnki.kjycx.2018.23.146
〔编辑:严丽琴〕
