带相关噪声的多传感器系统的融合滤波器*
2018-12-18余永龙费绍金
余永龙,费绍金
带相关噪声的多传感器系统的融合滤波器*
余永龙,费绍金
(宿迁学院 文理学院,江苏 宿迁 223800)
研究了带有有限步自相关过程噪声和纵向相关噪声的多传感器网络化系统的分布式信息融合滤波问题。设计出单传感器子系统滤波,推导出任意两个子系统滤波误差协方差阵,最后仿真例子说明了算法的有效性。
相关噪声;多丢包;多传感器系统;融合滤波器
近几年来,网络控制系统滤波问题得到了人们的广泛关注。数据在实际的网络传输过程中,经常会出现时滞和丢包等不确定观测现象,对这类系统滤波问题的研究已经有很多报道[1-2]。另外,网络控制系统中噪声的干扰是不可避免的,文献[3]研究了具有有限步自相关噪声系统的最优滤波问题。然而,文献[1-3]考虑的均是单一传感器滤波问题。
多传感器信息融合滤波已成为一个热点课题[4],信息融合是提高滤波准确性的一个有效技术。信息融合滤波通常使用分布式滤波,利用每个滤波器接收的数据分别进行设计滤波,然后将这些滤波传输给融合中心,在一定的融合准则下进行融合。文献[5]研究了带未知通信干扰、观测丢失和乘性噪声的多传感器离散随机系统的分布式信息融合滤波问题,为提高滤波精度,在数据丢失时进行丢包补偿,但其需要假设系统过程噪声和观测噪声不相关。文献[6]在2017年研究了具有相关噪声的异步采样系统的分布式融合估计,但仅考虑了一步相关噪声。本文同时考虑具有相关噪声和不确定观测的多传感器离散线性随机系统的最优信息融合滤波问题,采用文献[3]中的模型构造各个单传感器子系统,然后推导出任意两个传感器子系统滤波之间的滤波误差协方差阵,基于最小均方误差意义下加权矩阵准则,设计出最优信息融合滤波,最后通过算例仿真验证最优信息融合滤波器的有效性。
1 问题阐述
考虑如下多传感器系统:




满足以下统计学性质:
k和k是互不相关且与其他变量不相关的随机变量,均服从Bernoulli分布,且{k=1}=,{k=1}=,其中,0≤≤1,0≤≤1.
假设初始状态与其他变量不相关,有如下统计性质:

2 信息融合滤波器及算法
2.1 引理1
第个传感器子系统滤波误差如下:

2.2 定理1
在假设条件下,第个和第个传感器子系统滤波误差互协方差阵有如下的递推形式:
3 仿真实例
算例1考虑具有3个传感器系统1~3,设:
设k=3,且过程噪声与3个测量噪声纵向相关,即它们满足以下方程:

利用定理1及文献[4]的加权矩阵融合准则,在MMSE原则下构造最优信息融合滤波。实际状态与其估计如图1所示,实际状态与其估计如图2所示。从图1、图2可以看出信息融合滤波器具有很精确的性能。
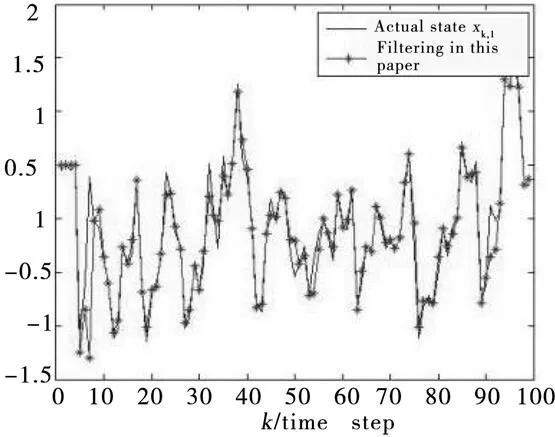
图1 实际状态xk,1与其估计
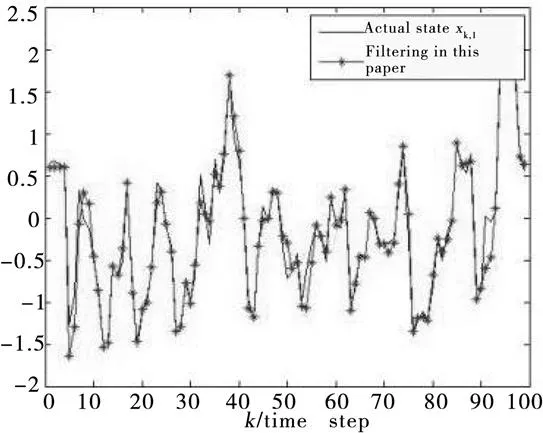
图2 实际状态xk,2与其估计
4 结束语
本文研究了同时具有相关噪声和不确定观测信息多传感器系统的分布式信息融合滤波器。基于最小均方误差意义下的加权矩阵准则,设计了一个新的最优信息融合滤波器,最后通过仿真例子验证了信息融合滤波器的有效性。
[1]Ma Jing,Sun Shuli.Optimal linear estimators for systems with random sensor delays,multiple packet dropouts and uncertain observation[J].IEEE Transactions on Signal Processing,2011,59(11):5181--5192.
[2]Sun Shuli.Optimal linear estimation for networked systems with one-step random delays and multiple packet dropouts[J].Acta Automatica Sinica,2012,38(3):349--356.
[3]陈东彦,余永龙,胡军.具有相关噪声和不确定观测系统的全局最优Kalman滤波[J].哈尔滨理工大学学报,2015,20(4):1-10.
[4]Sun Shuli,Deng Zili.Multi-Sensor Optimal Information Fusion Kalman Filter[J].Automatica,2004,40(6):1017-1023.
[5]祁波,孙书利.带未知通信干扰和丢包补偿的多传感器网络化不确定系统的分布式融合滤波[J].自动化学报,2017,43(1):1-8.
[6]Lin Honglei,Sun Shuli.Distributed fusion estimation for multi-sensor asynchronous sampling systems with correlated noises[J].International Journal of Systems Science,2017,48(5):952-960.
余永龙(1990—),男,宿迁学院,研究方向为复杂网络化控制系统的状态估计。
宿迁学院科研基金重点项目(编号:2016KY02)
2095-6835(2018)23-0026-02
0231.1;TN713
A
10.15913/j.cnki.kjycx.2018.23.026
〔编辑:严丽琴〕
