基于偏振信息的激光水下目标探测技术研究
2018-12-17牟畅王彩霞段可刘鹏
牟畅,王彩霞,段可,刘鹏
(1.长春理工大学 电子信息工程学院,长春 130022;2.长春理工大学 空间光电技术研究所,长春 130022)
海洋是人类赖以生存的生态圈中一个尤为重要的组成部分,辽阔的海域中含有丰富的海洋动力、海洋生物、海底矿产、海水化学等资源,这些资源的开发和保护,逐渐受到了各国家和人民的广泛关注。因此,水下目标的探测和识别技术的发展和进步,具有广阔的应用前景和很高的民用和军用价值。
在早期,海洋探测通常采用较为成熟的声呐技术,该技术存在灵敏度、分辨率较低且设备复杂等缺点,并且水下环境复杂多变,水温和水压等环境因素也会对探测结果产生影响,以上因素使得声呐技术很难达到人们的探测需求。1963年,S.Q.Duntely和S.A.Sullivan等科学家发现,海水中存在着一个大气透过窗口[1],该窗口对波长为470nm到580nm的光衰减十分微弱。从此,激光水下探测技术逐渐发展和成熟[2]。
本文所设计的水下目标偏振探测系统,将激光水下探测技术与偏振探测技术结合起来,当激光照射到水下目标表面时,目标会改变激光的偏振特性,从而使不同目标的反射光呈现出不同的偏振特性,利用这一特性,实现水下目标的探测和初步识别。该系统主要由激光发射器、光电探测部分、信号调理部分、控制单元和电源五个部分构成,实验所得数据通过串口发至上位机,应用LabVIEW虚拟器进行处理和计算,得到水下目标的偏振度,从而区分不同类型的水下目标。
1 偏振基本理论和偏振光的描述方法
1.1 偏振基本理论
偏振(Polarization)是指横波的振动矢量(垂直于波的传播方向)偏于某些方向的现象,是横波区别于其他纵波的一个最明显的标志[3]。在垂直于波的传播方向的平面,包含所有方向的横振动且任一方向上的横振动拥有同样的振动幅度,这类横振动与传播方向对称的光为自然光(非偏振光)。反之,振动失去这类方向对称性的光即为偏振光。通过数学概率统计来解释就是某一方向出现的概率为1或者大于其他方向出现的概率,即为偏振光。
根据偏振光的电磁特性可将其分为:线偏振光、椭圆偏振光、圆偏振光和部分偏振光四类,且其中的线偏振光和圆偏振光可以归属于椭圆偏振光的特殊情形。在实验过程中,可以通过偏振片来得到线偏振光,可以通过偏振片+波片调制得到圆偏振光。由于偏振特性主要描述X、Y轴分量之间的关系,且偏振光在水下传输时,其能量在X、Y轴方向的分量振幅同步衰减,但其关系不会改变,所以偏振光在水下传输时,其偏振特性是基本保持不变的,而三种偏振光中,圆偏振光在传输过程中受影响最小。
1.2 偏振光的描述方法
截至目前,已有多种定量化描述偏振光参量的方法,其中最常用的有三角函数描述法,Jones矢量描述法、Stokes矢量描述法和Poincare球图书描述法等[4]。本文选取Stokes矢量描述法对圆偏振激光反射光的偏振特性进行描述。
Stokes矢量描述法通过I、Q、U、V四个参量对光的强度和偏振态进行了描述,Stokes参量定义为[5]:

为便于光电探测器直接测量,每个Stokes参量都可以用强度量纲来表示为如下形式[6]:

式中,I为入射光总强度,Q为0°、90°方向上偏振分量的强度差值,U为45°、135°方向上偏振分量的强度差值,V为右旋、左旋圆偏振分量之间的强度差值。
在测得I、Q、U、V四个参数之后,通过计算偏振度DOP来表示偏振光在总光强中所占的比例,DOP表达式如下:

或表示为:

2 探测系统总体设计
2.1 系统总体方案
以上述探测原理为依据,设计水下目标探测系统如图1所示。

图1 系统总体设计框图
由图可知,系统主要由激光发射器、光电探测部分、信号调理部分、控制单元、PC机和电源五个部分构成[7]。激光发射器选用波长为532nm的DPS-532-B激光器。光电探测部分具备响应迅速、特性良好等优点;信号处理部分共有四个信号处理电路板,具备高增益、低噪声等优点;控制单元可实现对放大电路增益的设置,可以与PC机完成双向串口通信;Lab-VIEW软件能够接收数据并完成对数据的存储、计算和显示。制作完成后的系统硬件电路板实物图如图2所示。

图2 系统硬件电路板
2.2 光学系统设计
Stokes参量可用光电探测器直接测量,常用的测量方法为:偏振光调制法和分振幅法。偏振光调制法是通过调节检测光学器件,周期性的改变入射光的偏振状态,对测量得到的光强值进行计算得到斯托克斯参量。分振幅法是利用直角分光棱镜对来自光学系统镜头组会聚的反射光进行分束,得到两束正交的偏振光,再利用偏振分光棱镜对来自直角棱镜的光进行两次分束,从而将两束光分为四束,入射到光电探测器上。本文采取分振幅法测量Stokes参量,测量原理如图2所示。

图3 光学系统原理框图
测量步骤为:
(1)利用直角分光棱镜将目标反射的偏振光分成垂直的两束偏振光;
(2)利用偏振分光棱镜同时得到0°、45°、90°、135°的Stokes参量;
(3)利用532窄带滤光片滤除探测器接收到的其他背景光;
(4)探测器得到能量值,利用Stokes矩阵算得各个Stokes参量,获得偏振度。
2.3 电源设计方案
本文选用单相直流稳压电源为探测系统供电,220V、50HZ的交流电经过变压、整流、滤波之后,加入NS公司的LM系列稳压芯片以保持电源稳定供电,电路图如图3所示。

图4 电源电路图
3 系统软件设计
根据系统需求,用LabVIEW软件完成主要功能为:能够与控制单元通过窗口进行双向通信,接收串口传来的数据并完成对数据的计算、存储和显示。
LabVIEW软件显示界面如图5所示。

图5 LabVIEW前面板显示界面
4 探测实验与结论
本文在水深为10m的海水仿真水池中对三种特性不同的水下目标进行探测。由于水体偏振反射实验中镜面反射方向所测得的偏振信息最多[9],因此,本实验都是在入射角相等的反射方向进行探测的。根据理论研究和实验验证可知:随着入射角度的增加,水体在镜面方向的反射比值也增加,而反射光中平行入射面的分量随着角度的增加而逐渐减小,尤其是入射角接近布儒斯特角的时候(约为50度),出现偏振最小反射比值。
由于实验环境的限制,为了提高光电探头的利用率,需要尽量保证激光器垂直入射,所以,实验中将入射角和探测角均设定为10度,再利用回波探测单元探测反射光的偏振信息,并对测量数据进行计算和比对,得出结论,验证系统正确性和可行性。
三种物体依次选用常见的水下目标,铁、塑料和水草,铁和塑料是人造物,水草是自然物体,选取目标具有代表性,实验测量过程中,对以上三种物体的测量数据进行10次记录,并运用公式(4),计算得到三种物体反射圆偏振光的偏振度数据,绘制折线图,如图6所示。

图6 目标偏振度数据折线图
由图可知,在探测距离为10m时,铁的平均偏振度为0.712,塑料的平均偏振度为0.624,水草的平均偏振度为:0.592。三种目标物体的反射光偏振度关系为:铁>塑料>水草。
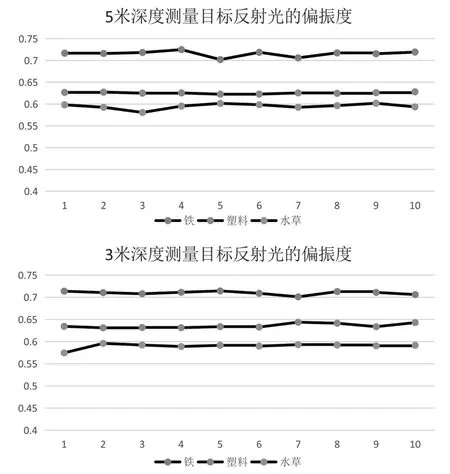
图7 目标偏振度数据折线图
由上述实验可知。人造目标的反射光偏振度明显高于自然目标的反射光偏振度,而两种不同材质、不同表面结构的人造目标,其偏振度也有区别。得出结论:目标反射光偏振度与目标的材质、表面结构、纹理、粗糙度等因素息息相关,符合本文所做理论研究,证明了本文所提出基于偏振信息的水下目标偏振技术是可行的。
为避免一次实验的结果过于片面,增加其可靠性,本文又在探测距离为3m和5m的情况下,对上述三种常见的水下目标进行了同样的探测,探测结果如图7所示,与上述实验探测结果相符,得到结论:探测深度不会对实验结果有很大的影响,说明本文所设计的探测系统可以应用于更远距离的水下目标探测。
5 结论
水下目标探测技术具有十分广阔的应用前景,它不仅可以水下目标的探测和识别,还可以用于海水光学参数的测量、海下地貌地形的描绘等多种方面。本文利用激光和偏振探测技术,设计了基于偏振信息的水下目标探测系统,并对该系统进行了初步的测试,验证了理论可行性。为水下目标的探测和识别提供以一种新途径。
