智能绿化远程控制系统的设计
2018-12-14刘清华王承林袁泽宇
刘清华,刘 钊,王 蕾,王承林,袁泽宇
(1邢台学院,河北邢台 054001;2河北广播电视台发射台,河北石家庄 051130;3邯郸海关,河北邯郸 056017)
如今计算机科技、物联网技术发展迅速,我们将这些技术应用到设施城市绿化中去,来达到植物最接近理想化的生长环境。利用全自动控制系统,模拟出最适宜的生态环境,将外界环境和气候变化的影响降到最低。现代化自动绿化控制技术将极大限度地促进智慧城市的发展,其应用前景十分广阔。
1 远程控制系统硬件设计
系统利用STC15F2K60S2单片机,控制实现不同类型植物生长所需的最科学合理的环境,并且可以通过各类传感器对植物生长环境因子进行实时监测采集和调整,以达到合理控制、科学生长和节约用水的目的。利用程序可以对单片机控制来实现按需灌溉的功能,按照植物的需求来实现灌溉系统的通断以及灌溉时间的控制,达到节水和科学生长的目的,最大限度地节约资源,提高精确度和安全性,达到科学准确的要求。
1.1 远程控制系统的整体设计
本系统以STC15F2K60S2单片机作为主控制芯片,通过土壤、空气温湿度等多个传感器采集数据到单片机进行处理,通过光敏传感器和LCD12864液晶屏配合进行显示,执行部分采用继电器和电磁阀等进行控制,利用无线模块来达到远程控制的目的,同时通过光敏传感器来实现对于光照系统的控制,系统整体硬件框图如图1所示。
硬件电路以STC15F2K61S2单片机为核心,系统输入由各类采集传感器信号处理电路组成,显示部分由光敏传感器与显示器组成,通信部分由ESP8266无线模块实现,输出控制由继电器以及执行机构组成。
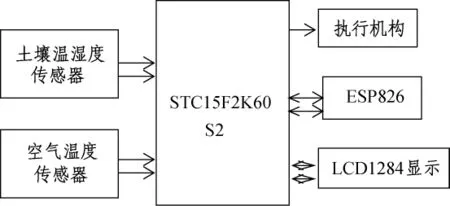
图1 系统整体硬件框图
1.2 控制芯片STC15F2K60S2单片机
系统设计将STC15F2K60S2芯片作为系统的中央处理器,具体引脚配置如表1所示。
表1 STC15F2K60S2引脚配置
1.3 显示部分设计
系统采用LCD12864型液晶屏实现系统的人机交互功能,LCD12864电路原理图如图2所示,该液晶屏在本系统与单片机的P4.1~P4.4、P0.0~P0.7接口相连接。
1.4 远程无线通信电路
为了方便用户的实际使用,本系统加入了远程无线控制模块,可以通过远程控制来监测大棚内的各项数据。系统采用ESP8266模块作为通信模块,ESP8266模块实物图如图3所示。
ESP8266模块与单片机P3.0、P3.1连接,ESP8266是远程控制的核心器件,ESP8266模块电路连接图如图4所示。
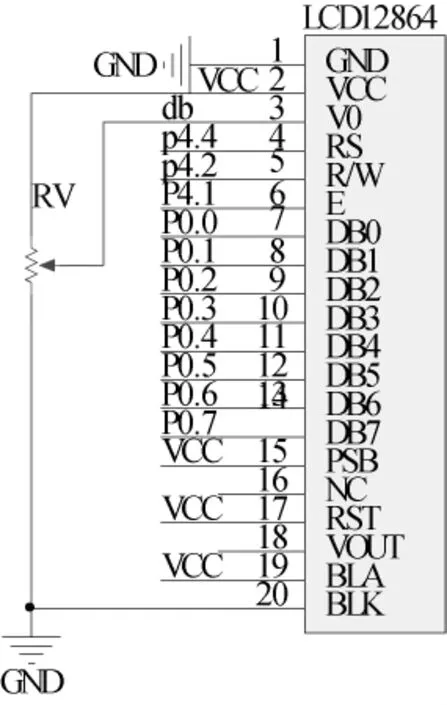
图2 LCD12864电路原理图
图3 ESP8266实物图
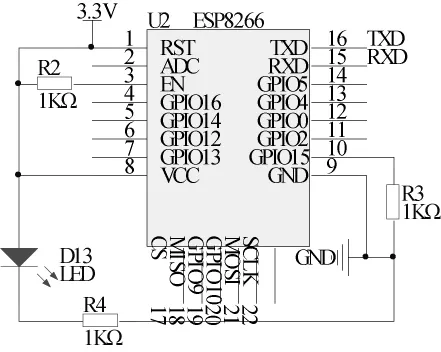
图4 ESP8266电路图
1.5 继电器控制电路
土壤湿度传感器采集的模拟信号将通过单片机转化为数字信号,并将该信号通过P2.0接口送到继电器控制三极管基极。电路图如图5所示。
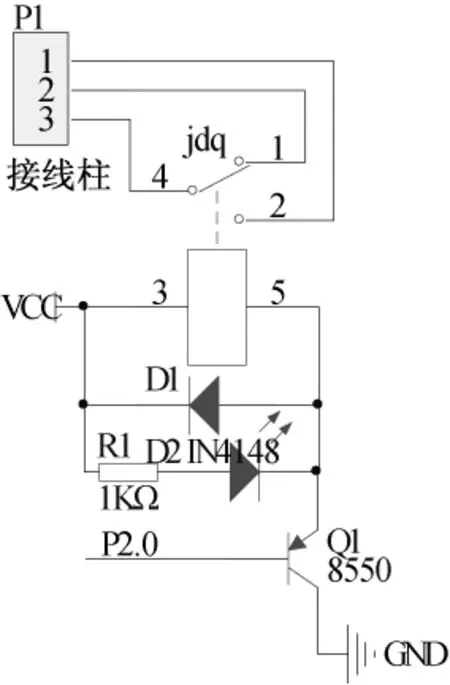
图5 继电器控制电路
2 温室大棚远程智能控制管理系统的程序设计
由于系统选用的主控制器是单片机,单片机软件主要包括主程序、A/D采样子程序(湿度传感器采样,温度传感器采样)、键盘设定参数和显示等子程序,下面将逐个介绍相关程序的设计实现方法。
2.1 系统传感采集模块程序设计
通过对传感器输入的模拟信号进行转换、处理分析并与预设参数限值进行比较给予判断,满足一定条件则执行相应控制功能。然后再次进行检测,执行,再次修正,形成一个闭环反馈,来维持整个大棚内环境的稳定,传感控制程序流程图如图6所示。
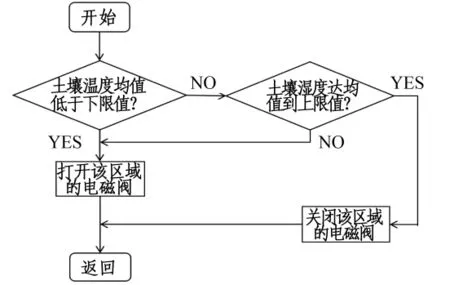
图6 系统程序流程图
2.2 系统执行部分程序设计
系统执行部分主要是通过单片机接受检测信号之后打开相应的继电器控制单元,然后对应的执行系统开始动作,传感部分同时对环境进行检测,当环境达到要求的时候关闭继电器控制单元,执行系统停止动作。
3 数据的测试与分析
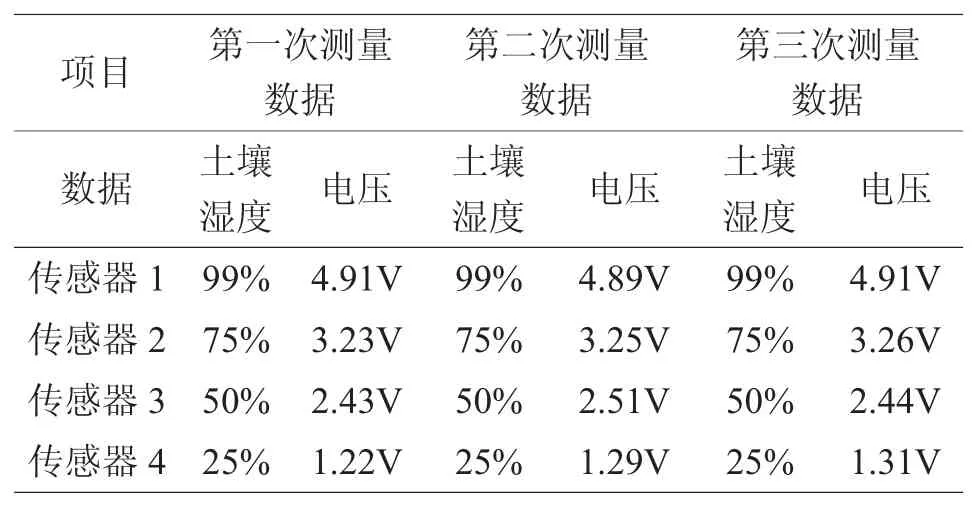
表2 土壤湿度测试数据
分析:经过多次重复性试验的实验数据分析可知:当土壤湿度呈线性变化时,传感器输出电压同样为接近线性的曲线,波动在±0.1V范围内,该系统可测得基本的土壤湿度以完成项目要求。
结论:通过对多个模块以及机构的整合,基本达到预期的功能,实现绿化的自动控制,环境可以自动进行调整。保证植物始终生长在适宜环境中。设计从实际的应用出发,目的在于建立一套完整的远程绿化智能控制系统,特别是加入无线通信部分,可以同时对多个系统在线进行远程控制管理,方便使用者的统一管理,解放劳动力,提高了工作效率。
