潜器浮力调节系统的低功耗控制策略
2018-12-12穆为磊邹振兴孙海亮杨友胜
穆为磊,邹振兴,孙海亮,杨友胜
(1.中国海洋大学机电工程系,266100,山东青岛;2.北京宇航系统工程研究所,100070,北京)
随着人类认知海洋、开发海洋的逐步加快,研制大潜深、长航程的潜器成为研究热点[1-2]。自主水下航行器、自主沉浮剖面观测浮标(以下简称“剖面浮标”)、载人深潜器和水下滑翔机[3]等重要的海洋探测平台正得到广泛的关注和研究。浮力调节系统是潜器的重要组成部分,可用来补偿潜器浮力变化和驱动潜器运动[4]。浮力调节系统可分为变容积式和变重力式两种。变容积式不改变潜器自身重量而改变潜水器的排水体积,使其浮力状态发生变化[5],美国ALVIN号载人深潜器、日本URASHIMA号载人深潜器和中国COPEX号浮标[6]等均采用变容积浮力调节系统。变重力式不改变潜器自身排水体积而改变潜器自身重量,使其浮力状态发生变化[5],美国新ALVIN号、俄罗斯和平一号、日本Shinkai 6500号以及中国的7 km载人深潜器蛟龙号等均采用此方式[6]。无论是变容积式浮力调节系统还是变重力式调节系统,单位距离的功耗是影响其长航程的核心问题,单纯的增加电池容量不能从根本上解决此问题,因此,研究浮力调节系统的低功耗控制策略,对减小潜器的驱动功耗,实现远航程深海科学考查、资源探测和海洋军事战略具有重要研究意义和应用价值[7]。
变重力式浮力系统是由电机带动液压泵实现海水在密闭水舱和外部海水之间的流动,变容积式浮力系统是由电机带动液压泵实现液压油在内外油囊之间的流动,这两种方式均是由电动机带动液压泵转动做功,能耗模型是相同的。因此,可以将常用的变体积浮力调节系统作为对象,研究其在剖面浮标驱动中的低功耗控制策略问题。
剖面浮标根据设定程序在海洋中自主运动,通过搭载科学测量仪器采集海洋剖面的温度、电导率、溶解氧和硝酸盐等物理海洋要素和生物化学要素[8-10]。目前,世界上主流的剖面浮标如Deep SOLO、Deep APEX、Deep NINJA和Deep ARVOR等,其浮力调节装置相比于测试设备消耗了大量的功耗,因此研究低功耗的调节策略具有重要的使用价值。Petzrick等采用连续低排量替代一次性大排量的调节方式,在APEX-Deep浮标中验证了该方式可降低总功耗[11]。该方法实质上是将高背压的泵调节问题转化为渐变低背压的泵调节问题,对高效低功耗的调节方式具有重要的启示作用。Kobayashi等在浮标定速上浮控制研究中,通过计算发现Deep NINJA上浮速度在0.08 m/s以上时功耗会降低[12],但未给出最低功耗控制策略。陈鹿等在综合考虑海水密度变化的前提下,提出分阶段启动电机的策略[13]。每次电机启动30 s,然后关闭电机,待浮标上浮速度小于0.1 m/s时再次启动电机,电机工作时间和速度阈值均为经验值。虽然以上控制策略对降低功耗有一定的作用,但是均没有给出浮标上浮的功耗模型及最低功耗的控制策略。Agrawal和Sumantr等对变重力式浮力调节(unmanned underwater vehicle,UUV)的运动过程进行了模拟研究[14-15],对建立潜器运动过程功耗模型具有借鉴意义。然而,这些运动过程均未考虑到海水密度变化对UUV浮力的影响。对于剖面浮标而言,海水密度变化对浮力调节系统的影响不可忽略。
基于此,在考虑海水密度变化的条件下,本文建立了电机速度闭环控制模型,获得了电机功耗与输入转矩的关系式,结合柱塞泵的海水压强与输入转矩的关系式,推导出浮力调节系统上浮功耗方程式。该方程式在忽略壳体变形影响下求解,可获得不同启动次数的调节功耗,从而可以求取最低功耗的系统调节参数。
1 剖面浮标运动过程
剖面浮标采用变体积式浮力驱动方式,其运动过程[16]包括待命-下沉-漂流-再次下沉-上浮-传输数据6个阶段,如图1所示。
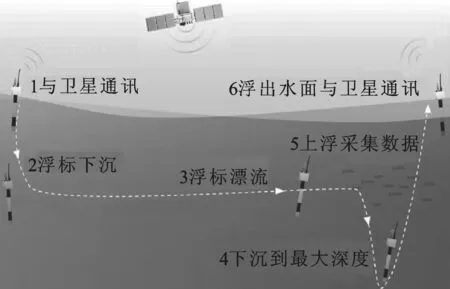
图1 剖面浮标运动示意图
剖面浮标的具体运动过程如下。
(1)浮标水面漂浮阶段。此时浮力等于自身重力,当接收到下潜指令后开始下沉。
(2)浮标下潜阶段。电机带动泵将一定体积的液压油由外油囊抽入内油囊,浮标排水体积减少,浮力小于自身重力。随着深度增加海水密度逐渐增加,浮标浮力逐渐增加,当下降到一定深度时,浮力和重力基本相等,浮标悬停漂流。
(3)浮标深潜阶段。电磁阀和电动机再次打开,将液压油继续抽入内油囊,浮标排水体积减少,浮力小于自身重力,浮标下降至最大深度,浮力重力重新达到平衡。
(4)浮标上浮阶段。电机带动液压泵将液压油从内油囊抽至外油囊,浮标体积增大,开始上浮。排油体积最大时,液压泵停止工作。
(5)浮标通信阶段。剖面浮标到达水面,通过卫星向岸基中心发送测量数据,完成一个周期的测量。
由于剖面浮标在上浮过程中海水压强较大,电机驱动液压泵的能量消耗占整个测量周期中能量消耗的比重大,因此,需要重点研究上浮阶段的低功耗运动策略。
2 浮力驱动系统分析
剖面浮标浮力驱动系统常采用电动机驱动液压泵调节外油囊的体积,从而驱动浮标实现上浮或下潜运动,因此,要分析浮标上浮过程功耗需要分析不同压强下泵需要的输入转矩和不同扭矩下电机的功耗。
2.1 柱塞泵
剖面浮标最大下潜深度为4 km,最深处海水产生的压强约为40 MPa。因此,剖面浮标采用瑞士BIERI柱塞泵(型号AKP103)作为浮力调节系统的液压泵,其最大工作压强为50 MPa。该柱塞泵的输入功率为
(1)
式中:p为工作压强;Vg为泵流量,取0.1 L/min;n为转速;ηt为总效率,取0.8;k为计算系数,取1.05。
柱塞泵的输入转矩为
(2)
式中:ω为柱塞泵配流盘转速。
根据式(1)和式(2)可得输入转矩与海水压强的关系为
(3)
图2为泵压强与泵流量关系曲线。由图2可知,该柱塞泵转速为1 000 r/min时,排量随着压强增加而略微减小。为了方便计算忽略压强对泵流量的影响,即假设额定转速下泵排量为定值,将泵流量数值代入式(3)得
T=2.1×10-2p
(4)
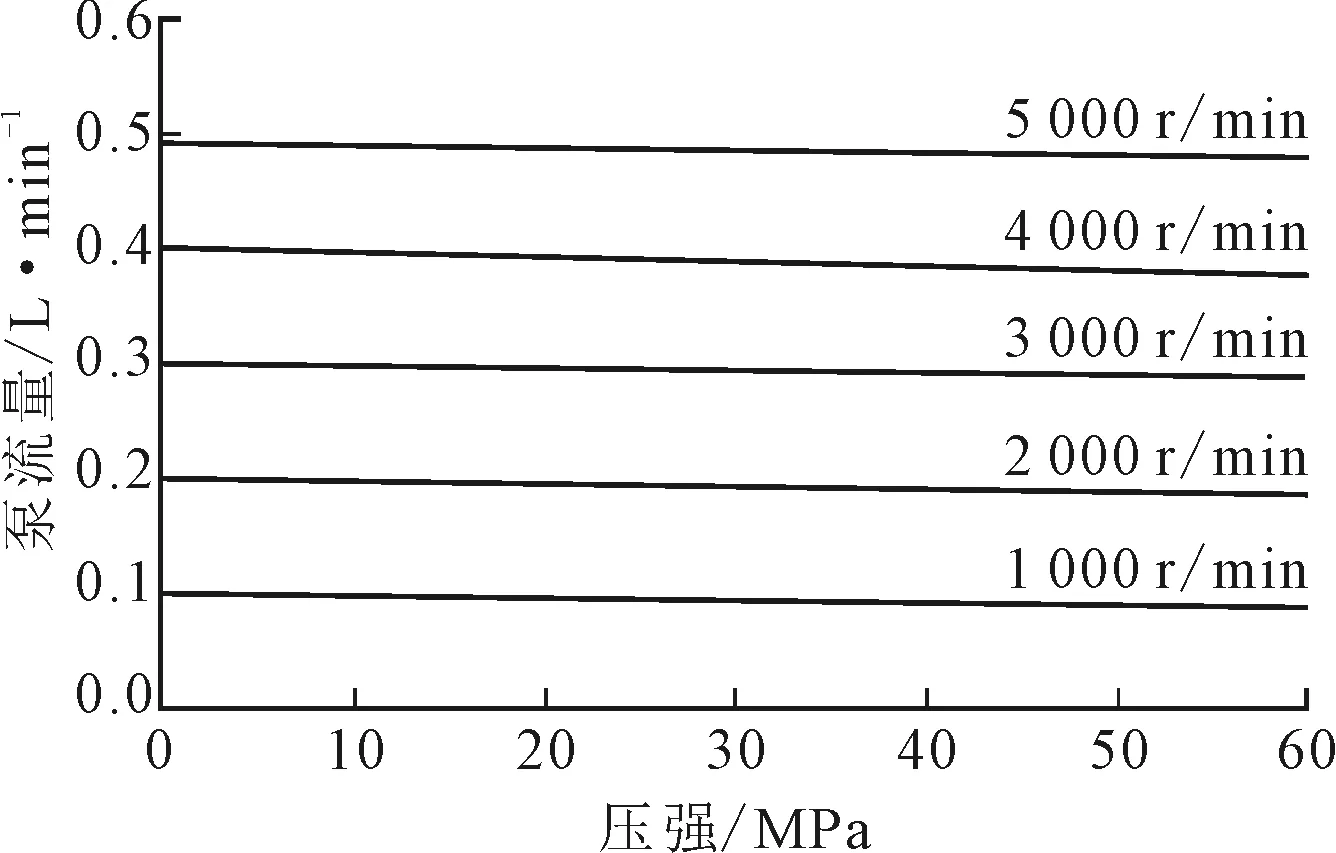
图2 泵压强与泵流量的关系
柱塞泵转速为1 000 r/min时,若压强差为40 MPa,则所需的输出转矩约为0.83 N·m,压强与输出转矩的关系如图3所示。
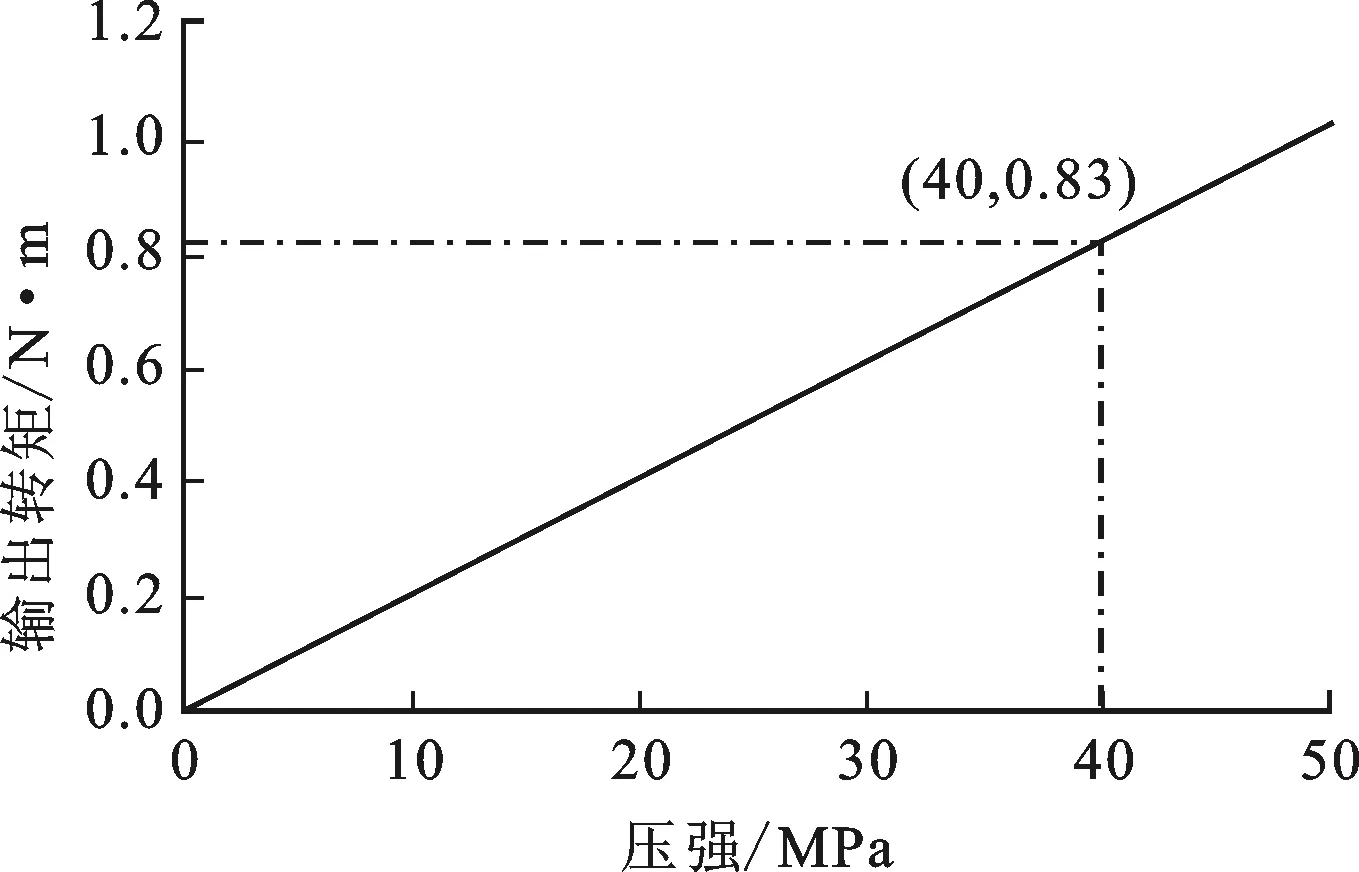
图3 泵压强与电机输出转矩的关系
2.2 电机
浮力调节系统中电机选择maxon-RE50无刷直流电机,额定转速为2 500 r/min。电机与柱塞泵之间连接减速器。通常,减速器传动效率较高可忽略减速器的功耗损失,因此,可认为电机的输出转矩与泵的输入转矩相等。根据上面的分析可知,泵所需的最大转矩为1 N·m,因此无刷电机的最大输出转矩为0.4 N·m。
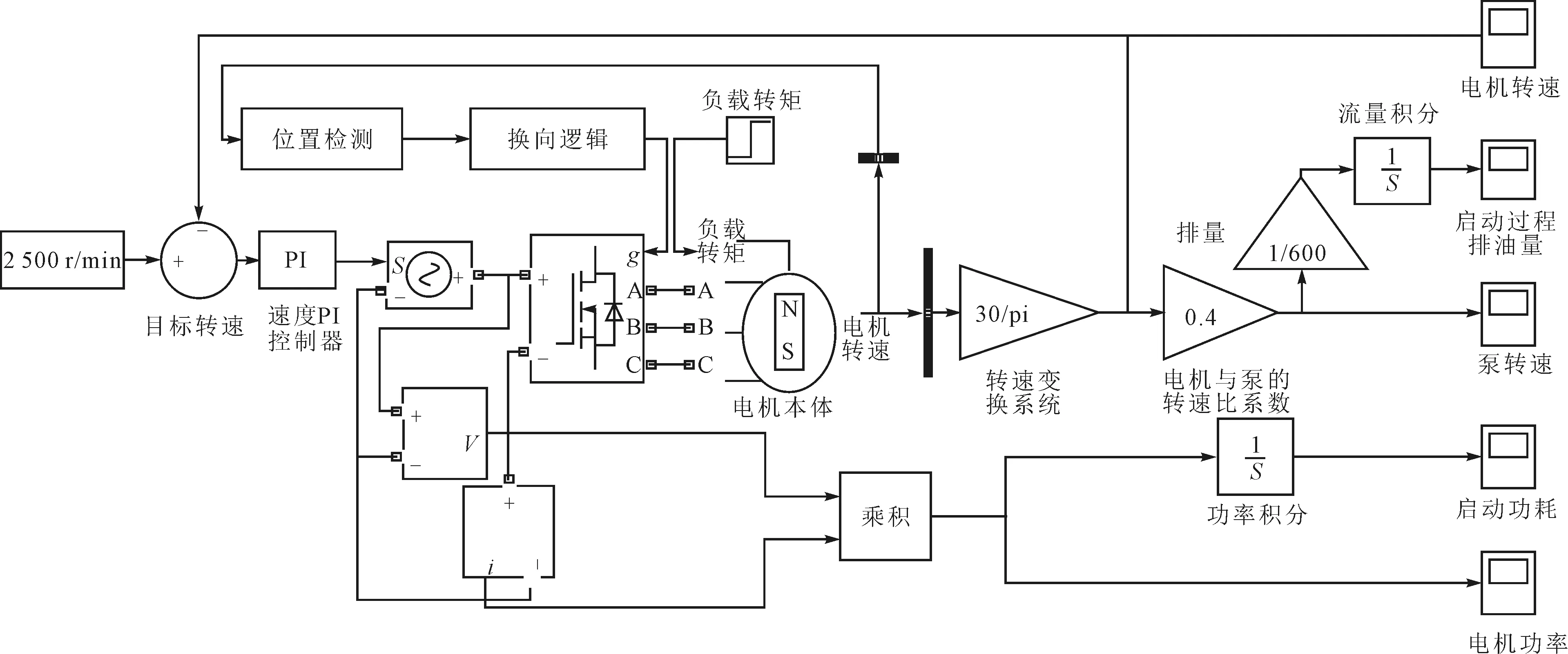
图4 无刷直流电机Simulink仿真图
采用Matlab/Simulink仿真平台搭建无刷直流电机速度PI闭环控制仿真模型[17],仿真模型如图4所示。根据电机的规格参数,仿真模型中电机电感设置为7.2×10-5H,电阻设置为0.103 Ω,转矩常数设置为3.85×10-2N·m/A。根据压强与输入转矩的关系,设置不同的输出转矩,可以模拟电机启动至额定转速运行的过程,获得运行过程的电机转速、泵转速和功耗等数据。经过试验发现,PI控制器积分和比例常数分别为0.018和0.001时电机的速度响应快、超调量小。在此参数下,电机启动2 s后达到额定转速,此过程的功耗称为启动功耗,其后的运行功耗称为额定功耗。在仿真系统中,无刷直流电机负载的取值范围为0~0.4 N·m,取值间隔为0.05 N·m,从而得到不同负载转矩下的启动功耗和稳定运行功率,如图5和图6所示。

图5 负载转矩与电机启动功耗曲线
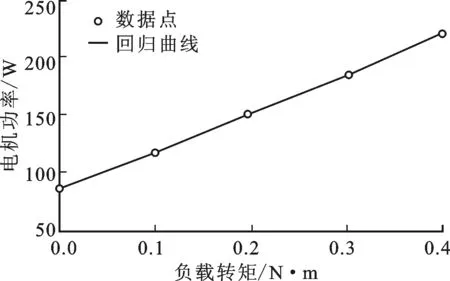
图6 负载转矩与电机功率曲线
通过对负载转矩和启动功耗的数据点进行回归分析,发现两者程近似线性关系,电机启动功耗的表达式为
WS=666.7T+166.7
(5)
式中:T为电机负载转矩。
通过对负载转矩和稳定运行功率的数据点进行回归分析,发现两者程近似线性关系,电机稳定运行功率的表达式为
Pe=333.3T+83.3
(6)
3 上浮过程功耗
在电机和柱塞泵分析的基础上,可以获得特定压强下抽出一定体积液压油需要的功耗。采用多次定量调节的策略,因此,可以建立整个上浮过程的总功耗模型。假设上浮时泵每次往外油囊抽出的液压油体积为
v=V/n
(7)
式中:V为压油的总体积,取720 mL;n为抽油次数。
在每次调节完成时浮标所受的浮力大于自身重力,浮标上浮。上浮过程中海水密度随深度减小而减小,浮标所受浮力变小。当浮力等于重力时,浮标受力平衡,在水阻力的作用下停止运动,此时电机再次启动,重复上述过程直到浮出水面。
由于每次柱塞泵向外油囊抽入液压油的时间较短,假设在每一次抽油的过程中,浮标位置不变,海水压强保持不变,因此,不需要考虑浮标的运动过程而只需要考虑每次抽油前浮标的静止位置和状态即可。
南中国海水密度与深度的关系[10]大体呈线性变化,如图7所示。200 m以上海水密度随海水深度关系为
ρ=0.004 804h+1 026.54
(8)
式中:h为海水的深度。
式(8)可以变换为
h=208.15ρ-213 675.5
(9)

图7 中国南部海水密度曲线
当浮标重力与浮力平衡时,浮标悬停漂流,此时,浮标受力平衡,即
mg=ρ(h)gVa
(10)
式中:m为浮标的总质量;g为重力加速度;ρ(h)为海水的密度;Va为浮标的总体积,包括浮标球体体积和外油囊的体积。
浮标所受到的海水压强为
p=ρ(h)gh
(11)
由式(9)~(11),可得
(12)
式中:i为当前调节的次数;V0为浮标壳体体积。
将式(12)代入式(4),得
(13)
式中:Ti为第i次调节过程泵输入转矩。
已知V0=0.027 25 m3,V=0.000 73 m3,将其代入式(13),得
(14)
每次抽油功耗Wi分为启动功耗Ws和额定运转功耗Wn两部分,Wn为第i次正常工作电机功率和时间得乘积,时间为每次应抽取的油量除以泵流量(启动过程很快,这里忽略启动过程抽油量),即t=720/n(100/60)=432/n。因此,每次调节电机的功耗
(15)
把式(14)代入式(15),可得
(16)
浮标上浮过程的总功耗为
(17)
4 结果与分析
假设n取值范围为1至40,计算各种调节次数的总功耗,抽油次数与总功耗的关系如图8所示。从图中可以看出,抽油次数与电机总功耗呈非线性关系。传统调节策略的抽油次数为1,此时电机的总功耗最大,总功耗为163 428 J。当抽油次数为16次时,电机的总功耗最少,总功耗为84 545 J。最低功耗比单次调节功耗减少78 883 J,理论上节约能量48.3%。
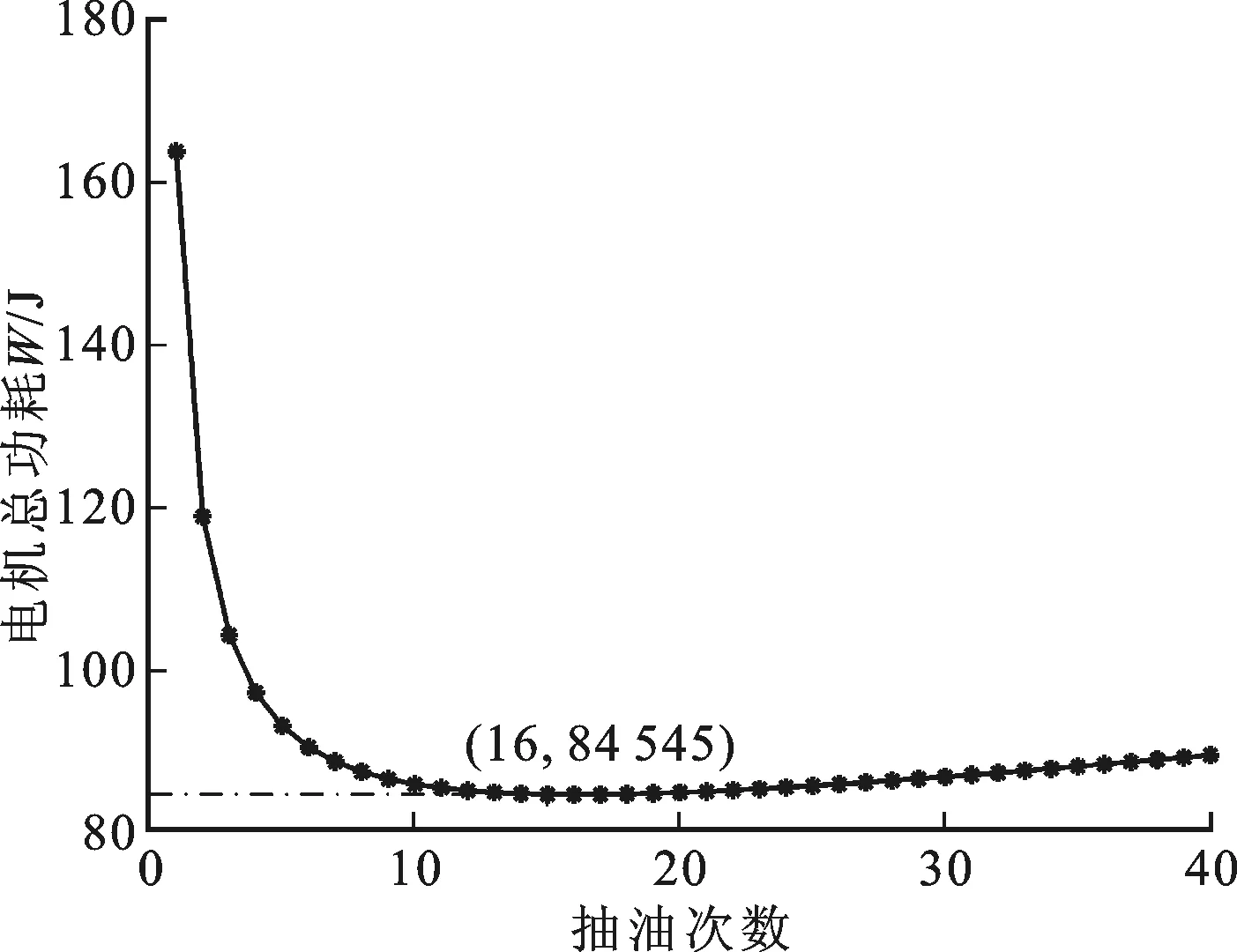
图8 抽油次数与电机功耗图
随着抽油次数的增加电机的总功耗先呈下降趋势,这是因为随着调节次数增多,抽油位置会不断的上升,抽油的环境压强逐渐降低,高背压大排量被调整为低背压小排量,因此上浮功耗逐渐降低;随着调节次数继续增加,功耗又逐渐增加,这是因为过多启动电机时,电机启动功耗会比正常工作功耗的比重大,即有用功相对减少,所以超过最低点之后次数增加总功耗会变大。
5 结 论
本文以变体积浮力调节系统驱动的剖面浮标为实例,研究其上浮过程低功耗调节策略。通过建立电机功耗模型和泵排量特性模型,获得了浮标上浮过程功耗方程,通过对功耗方程进行求解,得到上浮过程最优调节次数,当上浮调节次数为16时,总功耗最低。该控制策略将适用于采用浮力调节系统驱动的潜器,如水下AUV、水下滑翔机、剖面浮标以及载人潜水器等,对减小潜水器的驱动功耗,实现远航程深海科学考查、资源探测和海洋军事战略具有重要研究意义和应用价值。
