柔性可穿戴的腕关节运动角度传感器
2018-12-12李敏何博徐光华陈佳洲郭文亮郑翔张鑫
李敏,何博,徐光华,陈佳洲,郭文亮,郑翔,张鑫
(西安交通大学机械工程学院,710049,西安)
双手在人类日常生活中有重要意义[1]。腕关节是人体复杂的力学关节之一,实现屈曲和挠尺偏两种运动,对手功能的行使起到重要作用[2],因此监测腕关节的运动状态有重要的实际应用价值。在医疗康复领域,腕关节的运动姿态监测能够指导医生对患者的治疗和后续康复训练计划的制定,但目前缺乏对运动姿态的监测[3-4];在互动娱乐领域,腕关节角度的确定便于计算手部在关节坐标系中的实际位置;机器人表面传感器的发展也有助于机器人的精确控制[5]。
现阶段人体运动监测传感器根据原理分为电磁式、机械式、光学式、线缆式和基于视频图像的运动监测设备。Ascension和Polhemus等研究的电磁式运动监测系统包括发射器、多个监测传感器、中央处理单元和软件控制系统[6-7]。该类测量系统对监测环境要求严格,受场景中的金属影响较大,且存在总体体积大、监测传感器必须固定在被试身上、妨碍被试者做复杂运动等缺点,同时设备昂贵、数据采样率和精度较低,不能满足快速运动的需求。文献[8]中机械测量装置由固定在人体主要关节的刚性连杆组成,在转动关节处放置角度传感器,通过人体的运动来驱动监测系统工作。此类传感器采用机械结构,体积大、质量重,对被试的动作阻碍较大。VICON、NDI Polaris Spectra等光学运动捕捉系统是将Marker点贴在被试身上,通过追踪标记点的运动轨迹来完成监测任务[9-10]。该类系统存在自遮挡问题,容易造成数据丢失,且后续需进行大量的数据处理。数据手套[11]主要用于手部位姿的监测,目前已经开发出基于压电效应、光电效应和电磁效应等不同原理的数据手套[12-14],但数据手套的价格较高,且主要监测手指的运动状态,忽略腕的运动姿态感知。以KINECT为代表的深度摄像头的问世为图像处理的方式提供新的发展思路[15],但存在自遮挡和精度低的缺点。
近年来,用于测量关节角度运动的光纤传感器发展迅速。Silva等人提出光纤与织物相结合的设备来测量肘关节的弯曲[16],但该穿戴设备与人体关节部位未能紧密贴合时有较大的测量误差。Sareh等人应用光纤宏弯损耗的原理,将3组光纤平行分布在圆柱形柔软机器人的侧表面以检测该机器人轴线的弯曲角度[17],试验证明该传感器重复性好,但误差大。Augustin等分别将光纤宏弯传感器、布拉格光纤、反射式光电传感器3种传感器编织在织物上,通过测量呼吸时腹围的变化,监测呼吸作用在磁共振成像环境中的潜在影响[18]。Back和Xie Hui等分别利用双光纤反射式光强调制机理,设计用于微创手术触诊的伪触觉传感器[19-20],该类传感器具有结构简单、容易制造和小型化,且重量轻、可灭菌、兼容磁共振环境的优点。考虑光纤经过编织后的传感器具有伸展压缩的特性,且对温度不敏感、不受电子干扰的优点,设计并制作灵敏度高、成本低的光纤传感器有很大的市场价值。
因此,本文利用光纤的宏弯损耗特性设计传感器测量腕关节掌屈运动角度。设计时,首先选择合适的光纤及最小弯曲半径,以此为基础制作硅胶模块,开展基于皮肤伸缩的关节角度监测试验和人造皮肤模块的拉伸试验,最后分析设计人造皮肤模块穿戴装置并进行标定试验,以验证该监测装置的可用性。
1 手腕运动监测装置的总体设计
1.1 手腕模型分析
硅橡胶人造皮肤监测装置需要直接贴合在人体手腕上,为确保设计准确性和监测高效性,需对手腕的解剖学结构组成和运动形式进行分析。
手腕是连接人体手掌和小臂的重要部位,由骨骼、韧带、关节,肌肉和肌腱组成。腕部靠近小指的一侧称为尺侧,靠近拇指的一侧称为桡侧。腕关节前后、两侧均有韧带,可做屈、伸、展和收运动。腕内收是掌向桡侧屈曲,腕外展指掌向尺侧弯曲,背伸指手掌向手背侧面伸展,掌屈是掌向手心面屈曲。其中,由于桡腕掌侧部分的韧带较为坚韧,因此掌屈的幅度要小于背伸的弯曲角度。手腕的掌屈和背伸运动配合肘关节运动能够满足人们基本的生活需求。因为监测掌屈运动的设备布置在小臂相反的方向即可监测背伸运动角度,所以本文以手腕的掌屈运动为研究目标。本文中手腕监测的0°定义为人手手背和小臂在同一条直线上的状态(图1中虚线部分所示的腕关节姿态)。由于大部分测试者的掌屈运动范围为0°~60°,因此本文的测量范围确定为60°。
1.2 基于皮肤伸缩的关节角度监测原理
本文腕关节掌屈运动监测原理如图1所示。腕关节由虚线位置转动到实线位置时,皮肤表面的B点运动到C点,加大了与A点的距离。本文通过测量皮肤表面固定点A、B之间的距离来间接实现关节运动角度的监测。

图1 关节运动角度监测原理
测量距离的装置是以光纤宏弯损耗为机理的硅胶模块。光纤宏弯损耗是指在光纤弯曲时,光束在光纤内部不满足全反射条件,折射到包层和保护层从而造成光强损耗的现象。
本文将光纤嵌入到硅胶模型后与腕关节贴合,使腕关节做掌屈运动时,关节两侧的固定点之间的距离转换为硅胶模型的伸缩,并引起光纤宏弯损耗,影响光强的变化。通过测量光强的大小来间接确定关节运动角度。
1.3 腕关节运动角度监测装置样机设计
1.3.1 硅胶模型的制作 在制作硅胶模型时,需要预先将光纤布置在未固化的硅橡胶中,因此需要设计浇筑模具以固定光纤。
本文选用的光纤为三菱SH1001系列。光纤由纤芯和包层组成,纤芯材料为聚甲基丙烯酸甲酯树脂,纤芯直径为217~263 μm。包层由氟化聚合物构成,外径为1 μm。该光纤包层的反射率为1.49。研究表明,该型号光纤在弯曲半径为5 mm以上、10 mm以下会发生宏弯损耗[17],因此本文设定光纤的最小弯曲半径为5 mm,以不损害光纤的前提下保证光纤传感器的灵敏度。
为使硅橡胶液体能够均匀流动到模具中,本文对布线引导槽预留切口。同时,在模具表面设计阵列的柱状凸起结构,使后续制备的模块中分布小孔,保证硅胶模块的伸缩性和穿戴时手部良好的透气性。最终设计的结果如图2所示。
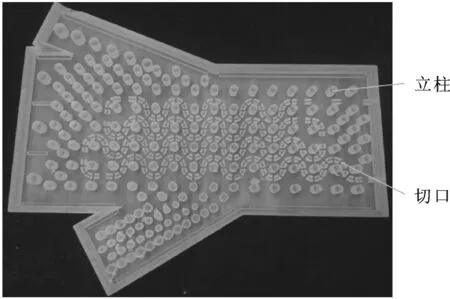
图2 硅胶模型模具

图3 制作硅胶模型的主要材料和设备
硅胶模型采用Ecoflex00-30系列硅橡胶材料,将A、B两种质量密度均为1.07 g/mm3的材料等比例混合,在25 min内将混合好的液体浇筑到模具中。用SolidWorks软件计算浇筑需要的硅胶体积为62 576.13 mm3,需要每种材料的质量为33.49 g。制作设备如图3所示。制作时先将光纤固定在模具的引导槽中,考虑杯壁上会残留部分材料,分别称取A、B材料35 g并充分搅拌,由针管将混合均匀后的材料浇筑到模具中。然后,把盛有液态硅橡胶的模具放入真空装置中,以减少固化成型后硅胶模块的气泡和孔洞。观察到没有气泡冒出时,将模具从真空装置中拿出,放在室温自然固化4 h后从模具中取出硅胶模块。
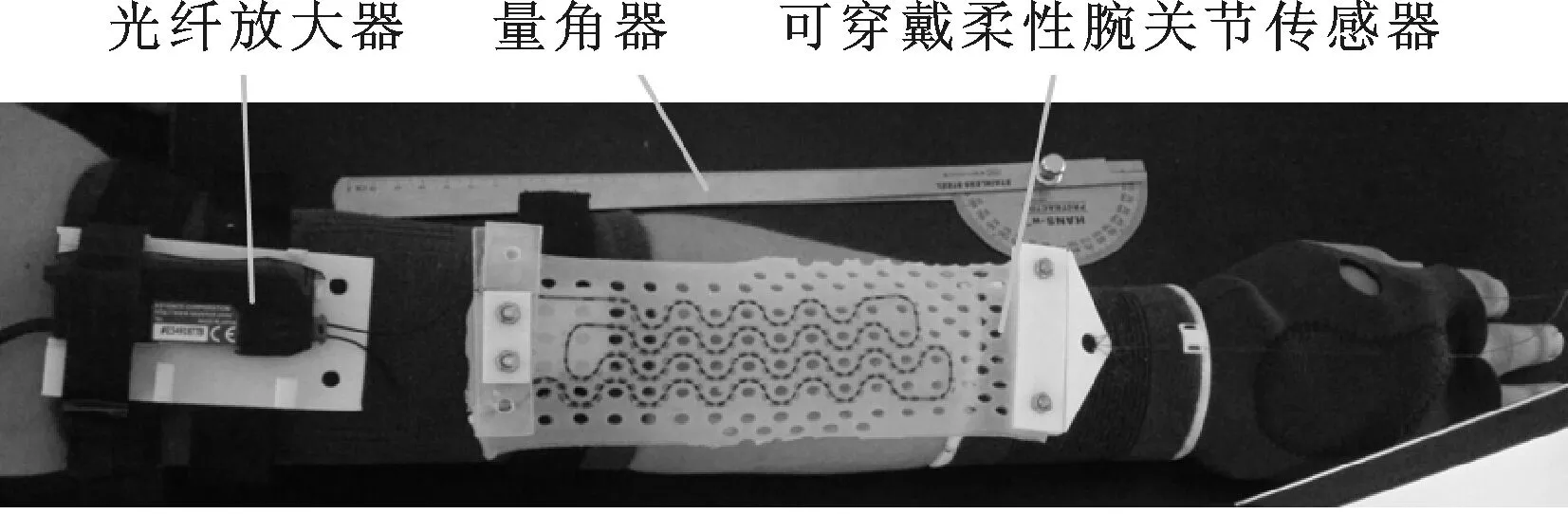
1.3.2 穿戴装置的设计与制作 硅胶模块制备完成后,需要设计穿戴装置,以便将硅胶模型固定于手腕上,物理样机如图4所示。本文采用护肘与人体手臂直接贴合,设计指环和夹持装置带动硅胶模块做伸缩运动。光纤放大器固定座将光纤传感器与护肘贴合。其中光纤传感器采用基恩士公司生产的FS-N11MN光纤传感器,输出电压为1~5 V。同时该传感器自带波长为630 nm的光源,具有抗干扰,功耗低、体积小且重量轻的特点。

图4 腕关节掌屈运动传感器
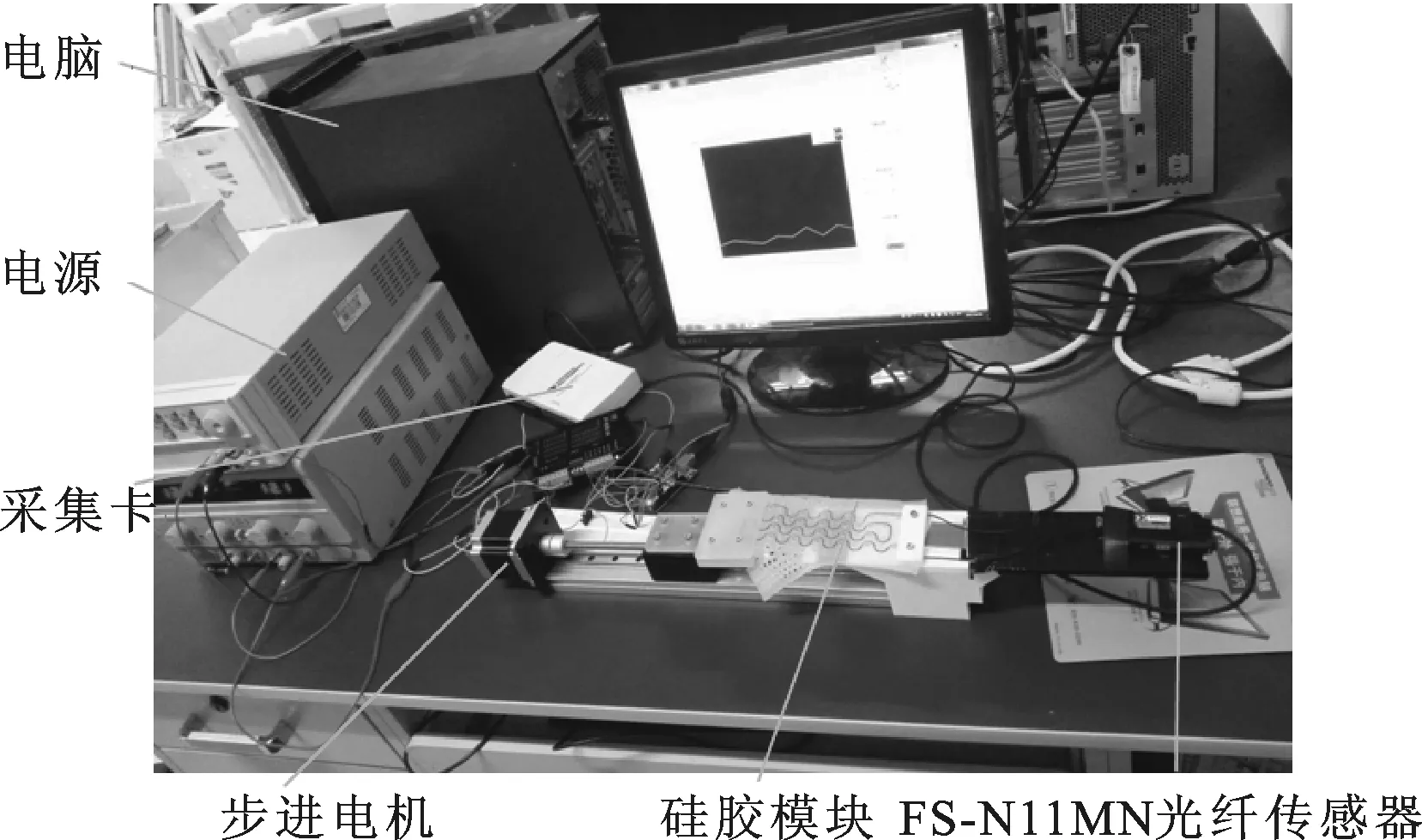
图5 硅橡胶模型拉伸试验台
2 腕关节运动监测装置特性验证
为了测量拉伸距离与光纤光强损耗的对应关系,搭建了如图5所示的基于步进电机控制的硅胶模块拉伸试验台。
试验时,设定滚珠丝杠的滑块移动范围为30 mm,带动硅胶模型做10次匀速拉伸收缩运动并用计算机通过NI采集卡记录光纤放大器输出的光强数据。将横坐标拉伸位移0~30 mm表示硅胶模型正行程拉伸,-30~0 mm表示反行程收缩,确定位移与光纤放大器输出电压关系如图6所示。
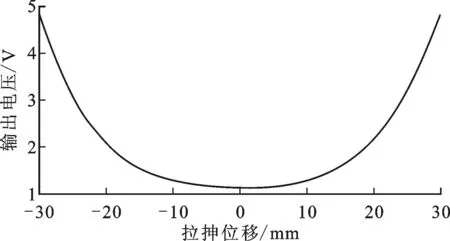
图6 拉伸距离与输出电压的变化关系
计算重复性误差
γR=±(ΔR,max/yFS)×100%=1.42%
(1)
式中:γR表示重复性误差;ΔR,max表示同一方向多次测量的输出值的最大差值;yFS表示输出值的满量程值。
计算迟滞
γH=±0.5×(ΔH,max/yFS)×100%=±1.39%
(2)
式中:γH表示迟滞误差;ΔH,max表示正反行程中同一输入量下输出值的最大差值。
一般仪器设计中参考重复性误差和参考迟滞性误差规定小于5%,硅胶模块符合仪器设计原则。图6表明,多次测量中重复性误差为1.42%,光纤宏弯损耗性质稳定;在拉伸距离小于30 mm时,输出电压与拉伸距离成线性变化,理论可以测量的距离范围可以达到30 mm。
3 腕关节运动角度传感器的验证
3.1 基于皮肤伸缩的关节角度监测

图7 腕关节角度与固定点距离变化试验图
应用腕关节角度测量装置之前,需要确定腕关节两侧固定点之间的距离变化与腕关节运动角度变化的关系。本文设计了一个如图7所示的穿戴装置进行试验测量。试验时,将回复弹簧的一端固定在小臂,指环套在中指,使牵引线尽量保持在一个平面内,调整牵引线长度,在手腕上寻找屈曲运动转动中心并标记,通过量角器测量腕关节屈曲角度,并测量拉线标记点与初始标记点间的距离。分别对5名测试者进行了3次试验,每次试验从0°开始到60°停止,每间隔10°记录一次数据。对试验数据进行线性拟合,拟合公式为
Y1=0.244 4X1+0.870 7
(3)
式中:X1表示关节运动角度;Y1表示固定点之间的相对距离。
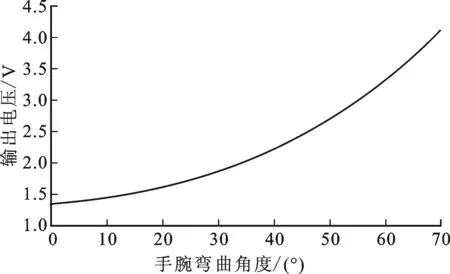
该直线拟合优度R2=0.956 5。对每个被试各组数据进行拟合,计算得到腕关节变化范围在60°时,两固定点间的距离变化量在14.87 mm到16.95 mm之间,单组数据进行线性拟合的拟合优度0.943 8 图8 腕关节运动角度与位移的关系 在使用该设备之前,需要对穿戴装置进行整体标定。随机选取测试者,测量他的腕关节最大弯曲角度为70°,表面皮肤拉伸距离为17.5 mm。选取滚珠丝杠移动端位移为10 mm到27.5 mm的范围代表需要测量的表面皮肤拉伸距离,将其转换为0°~70°范围内,图9为手腕掌屈运动角度与输出电压的变化关系曲线。将该曲线作为传感器特性曲线,确定其函数公式为 (4) 式中:X2表示腕关节弯曲角度;Y2表示在该角度下光纤传感器的测量电压。曲线的拟合优度R2=0.998 4。 图9 手腕掌屈运动角度与输出电压的变化关系 传感器验证试验是测量手腕在特定掌屈运动角度下的传感器输出值,并与理论分析的结果比较,修正误差。穿戴效果如图10所示。试验时,首先调整牵引线长度使硅胶模型初始拉伸距离为10 mm。以5°为间隔,测量穿戴模块在0°~70°之间的传感器输出电压值,共测量3组。将测量数据进行拟合,与特性曲线对比如图11所示,相对误差为0.53%。 图10 传感器验证试验 图11 试验拟合曲线和理论曲线的对比 标定试验结果中存在一定的误差,主要由于制作的硅胶模块在手腕运动过程中不能实时与小臂紧密贴合,存在摆动现象,使光纤的伸缩运动不在一个平面内。同时,在标定过程中人为的读数误差对结果也会产生影响。 本文分析了腕关节的运动形式,提出了用于监测腕关节掌屈运动的柔性光纤宏弯传感器,并详细描述了该装置的制作过程。对原理样机进行了验证,试验结果表明,测量装置的迟滞为±1.39%,重复度为1.42%。制作物理样机并进行标定试验,结果显示该传感装置能准确地监测手腕掌屈运动角度。在未来工作中,需要探究嵌入的光纤半径对测量结果的影响,并设计导轨,引导硅胶模块做直线运动,使硅胶模块与小臂紧密贴合以减少测量误差。
3.2 腕关节运动角度传感器标定

3.3 讨论
4 结 论
