基于扩张观测器的输入受限四旋翼飞行器轨迹跟踪动态面输出反馈控制
2018-12-10沈智鹏曹晓明
沈智鹏,曹晓明
(大连海事大学船舶电气工程学院,辽宁 大连 116026)
0 引 言
四旋翼飞行器具有结构简单、机动性强和成本低廉等优点,在侦察巡逻、影视制作和货物运输等场合得到了广泛应用。四旋翼系统的强耦合特性和复杂的动力学特性使得其模型很难精确建立[1],因此要设计轨迹精确跟踪的控制器具有一定挑战性,而且运动中的飞行器不可避免地受外界扰动的影响,这就进一步增加了控制器设计的难度。
反演法能够使控制器设计过程系统化、结构化,且可消除不确定性为匹配条件的限制,因此被广泛应用于非线性系统控制器设计中。文献[2]应用积分反步法并结合李雅普诺夫理论设计控制器,实现四旋翼飞行器轨迹跟踪控制。传统反演法在设计控制器时很容易出现“微分爆炸”问题,为解决这一问题,同时降低算法复杂度,动态面技术[3-5]被应用到控制器设计中。实际工况下,系统未建模动态和外界未知干扰是难以避免的,采用先进算法对其逼近能够提高系统的鲁棒性和控制精度。文献[6]考虑模型不确定性以及外界干扰的影响,提出一种新型自适应轨迹跟踪控制策略,能够有效提高飞行器系统的抗干扰能力。文献[7]针对存在未建模动态及外部扰动的四旋翼无人机姿态模型,提出一种自适应块控反演控制方法,设计控制器同时补偿模型动态不确定和外界扰动,实现轨迹跟踪控制。文献[8]把自适应反步法与双积分器李雅普诺夫函数结合使用,在控制器设计同时获得外界扰动的估计值,保证了在恒定风力干扰作用下全局轨迹跟踪误差收敛到零。文献[9]引入扩张状态观测器(extended state observer,ESO)处理飞行器系统模型不确定性以及外界干扰问题,使得飞行器系统对复合扰动具有较强鲁棒性。文献[10]针对带有模型参数不确定和外界扰动的四旋翼系统,引入反步法和ESO设计双闭环轨迹跟踪控制器,使得飞行器系统的鲁棒性有了显著提高。
目前针对扰动未知和模型不确定的四旋翼飞行器控制研究已有丰硕的成果,但同时考虑输入受限的研究文献还比较少。由于四旋翼飞行器硬件限制和安全飞行需要,实际控制过程中输入受限问题是无法避免的。为此,文献[11]针对四旋翼飞行器偏航控制输入饱和问题,设计多模式比例积分微分(multi-mode proportional-integral-derivative,MMPID)控制器抑制执行器饱和现象,为系统偏航运动提供保障。文献[12]针对一类存在控制约束多输入多输出(multiple input multiple output,MIMO)非线性系统的轨迹跟踪问题,提出一种约束自适应控制律,并引入辅助系统来减弱输入约束对系统的影响。文献[13]针对欠驱动四旋翼飞行器系统控制输入受限的轨迹跟踪控制问题,引入饱和函数对控制输出进行处理,能够避免因输入饱和导致的执行器失效问题。以上文献在进行轨迹跟踪控制时均要求飞行器状态信息全部可测,然而在实际飞行过程中一旦传感器失准或发生故障,飞行器的速度信息是不完全可测的。文献[14]提出了一种具有非匹配模型不确定性的非线性液压系统输出反馈控制方法,设计的ESO用来估计未测量的系统状态同时估计模型动态不确定性。文献[15]针对一类带有未知动力学干扰和随机扰动的非线性系统,设计ESO,用于估计系统未知状态和总干扰信息。文献[16]针对部分状态分量不可测MIMO系统的轨迹跟踪问题,采用非线性ESO对系统的模型不确定项和未知状态进行估测,并保证闭环系统的收敛性。文献[17]引入不依赖于模型的滤波器估计飞行器的速度信息,以便在速度反馈不可用的情况下完成轨迹跟踪控制并保证所有闭环信号有界。
为使所设计的控制器更加符合实际飞行要求,本文针对速度不可测和控制输入受限的欠驱动四旋翼飞行器轨迹跟踪控制问题,考虑系统存在模型不确定项和未知外部干扰的情况,提出一种基于ESO的输入受限四旋翼飞行器轨迹跟踪动态面输出反馈控制策略。该策略将四旋翼飞行器模型分解为位置部分和姿态部分,设计双闭环控制器。引入ESO估测飞行器系统的速度信息同时获得广义扰动项,采用动态面技术将反演算法中的微分运算转换为简单且易于实现的代数运算,并借助双曲正切函数设计动态补偿方程处理输入饱和问题。最后,以大疆 M100四旋翼飞行器为控制目标进行轨迹跟踪控制仿真,验证所设计方法的有效性。
1 问题描述

(1)
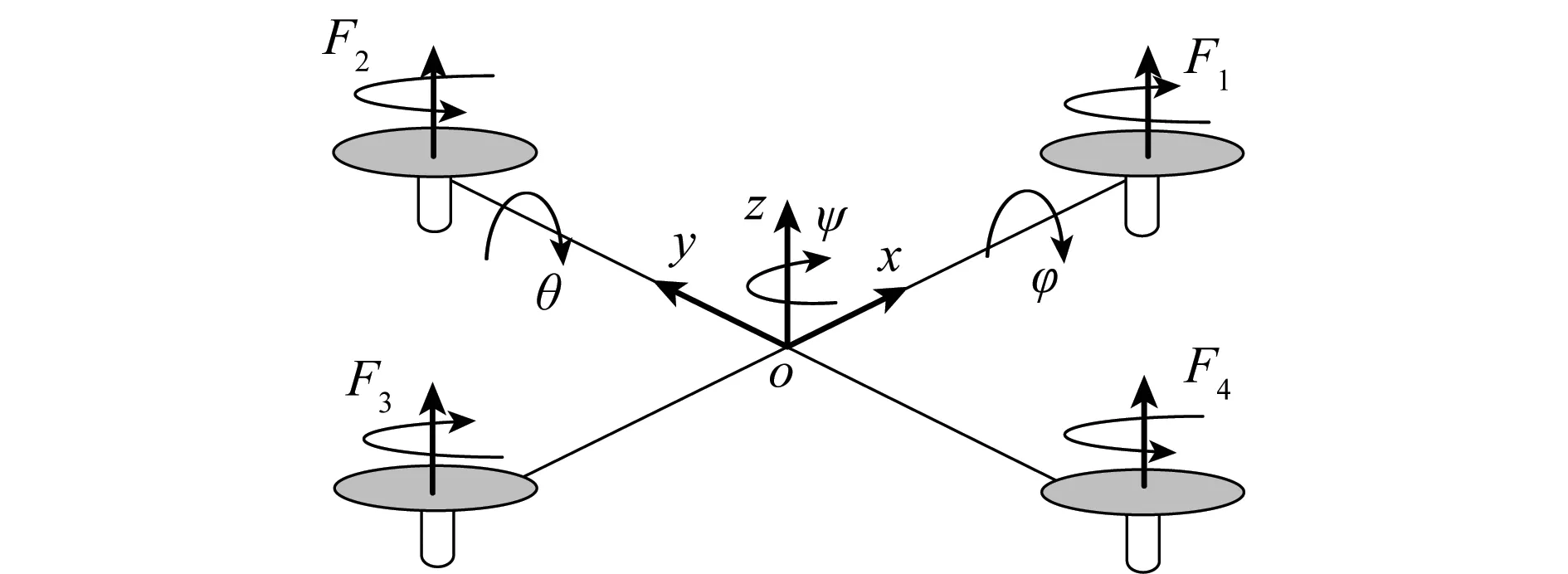
图1 四旋翼飞行器模型图Fig.1 Structure of quadrotor unmanned aerial vehicle
在实际飞行过程中由于电机转速的限制,飞行器控制输入是有界的,为避免控制量超出此界限,保障飞行安全,引入饱和约束函数
(2)
(3)
式中,σi为正设计参数,逼近后产生误差函数为
ρ(τj)=sat(τj)-g(τj)
(4)
式中,ρ(τj)为饱和约束函数与双曲正切函数之间的有界误差项,其界值表示为
|ρ(τj)|=|sat(τj)-g(τj)|=Mi(1-tanh(1))
(5)

系统控制目标:针对六自由度欠驱动四旋翼飞行器模型(1),在满足假设1的前提下,考虑系统存在模型动态不确定和未知外界干扰,以及速度信息不可测和输入受限的情况。设计轨迹跟踪控制器,保证飞行器轨迹跟踪控制系统中跟踪误差信号一致最终有界,实现对飞行器有效的轨迹跟踪控制。
2 非线性ESO设计
(6)

将未建模动态、气动干扰等“内部扰动”和外界未知干扰等“外部扰动”统称为广义扰动。
采用ESO获得飞行器速度信息,同时对广义扰动进行估测,ESO设计为
(7)


(8)

(9)

(10)
式中,c1,c2,c3均为正实数且互不相等,对于矩阵A,存在范德蒙德矩阵Q满足
(11)
定义cmin=min{c1,c2,c3} ,求解式(9)可得
(12)


(13)

证毕
本文在式(7)的基础上引入非线性函数fal(·),设计非线性ESO为
(14)

非线性函数fal(·)表示形式[16]为
(15)

3 输出反馈控制器设计

3.1 位置环控制器设计
定义位置误差为
(16)
式中,xd,yd,zd为参考轨迹。
定义线速度误差为
(17)
式中,αi(i=1,2,3)为待设计的虚拟控制量。
为了降低饱和效应,减小输入受限对系统状态跟踪误差的影响,引入辅助系统对跟踪误差e23进行补偿,辅助系统设计为
(18)
式中,κ1>0为设计参数;hξ为辅助系统状态;Uc/m为飞行器系统模型中的非线性部分。
重新定义补偿修正后的跟踪误差为
(19)
选取Lyapunov函数V1为
(20)
对V1求导并结合式(16)和式(17)整理得
(21)
根据式(21)借助逆推法设计虚拟控制律为
(22)
式中,λ1i>0(i=1,2,3)为设计参数。
(23)

(24)
选取Lyapunov函数V2为
(25)
对V2求导并结合式(1)和式(17)整理得
(26)


(27)

考虑方程
(28)
经运算可得
(29)
考虑实际工况下四旋翼安全飞行的需要,对俯仰角与滚转角范围给出约束条件为
|φ|≤φmax,|θ|≤θmax
(30)
为方便说明,进行变量代换,即
(31)
约束条件中,两个参数φmax,θmax均在(0,π/2)内取值,整理得到俯仰角和滚转角指令信号为
(32)
3.2 姿态环控制器设计
将式(1)模型中姿态部分转化为
(33)
定义姿态误差为
(34)
定义角速度误差为
(35)
引入辅助系统对跟踪误差e4进行补偿,辅助系统设计为
(36)
重新定义补偿修正后的跟踪误差
(37)
选取Lyapunov函数V3为
(38)
对V3求导并结合式(34)和式(35)整理得
(39)
设计虚拟控制律为
(40)
式中,λ3>0为设计参数。
(41)

(42)
选取Lyapunov函数V4为
(43)
对V4求导并结合式(33)和式(37)整理得
(44)
(45)

文献[9-10]在控制器设计过程中未考虑控制输入受限问题,但在实际工程中,控制输入饱和[22]现象是无法避免的。本文引入饱和约束函数,消除了因输入饱和导致的执行器失效现象,并设计辅助补偿系统以降低饱和效应。
文献[13]在控制器设计过程中未考虑状态信息不可测的情况,但特殊工况下因传感器失效导致飞行器速度信息不可测也是在所难免的。本文引入ESO对系统速度进行估测,能够有效应对传感器失效或者失准的状况,提高系统稳定性能。
4 稳定性分析
选取Lyapunov函数为
(46)
对Vc求导并结合式(26)和式(44)整理得
(47)

(48)
继续整理式(47)可得
(49)
其中
(50)
(51)
(52)
解不等式(49),可得
(53)
可得
(54)

5 仿真分析
为验证本文所设计输入受限四旋翼飞行器轨迹跟踪动态面输出反馈控制器的有效性,以大疆 M100飞行器为对象,分别采用螺旋盘升指令和矩形指令进行仿真验证,飞行器模型参数如表1所示。

表1 大疆 M100模型参数Table 1 DJI M100 model parameters
四旋翼飞行器模型不确定部分设定为
四旋翼飞行器受到的外界干扰设为
控制器参数选取λ1i=2(i=1,2,3),λ2i=8(i=1,2,3),λ3=6,λ4=36,T1=0.01,T2=0.01,ESO参数取γ1=60,γ2=600,γ3=6 000,饱和辅助系统参数取κ1=3,κ2=3,σi=2(i=1,…,4),控制输入界限取[M1,M2,M3,M4]=[50,10,10,2]。
设定飞行器的初始位置和状态信息为
5.1 螺旋盘升轨迹跟踪仿真
螺旋盘升轨迹设定为
图2为本文算法控制下四旋翼飞行器跟踪螺旋盘升轨迹仿真曲线。
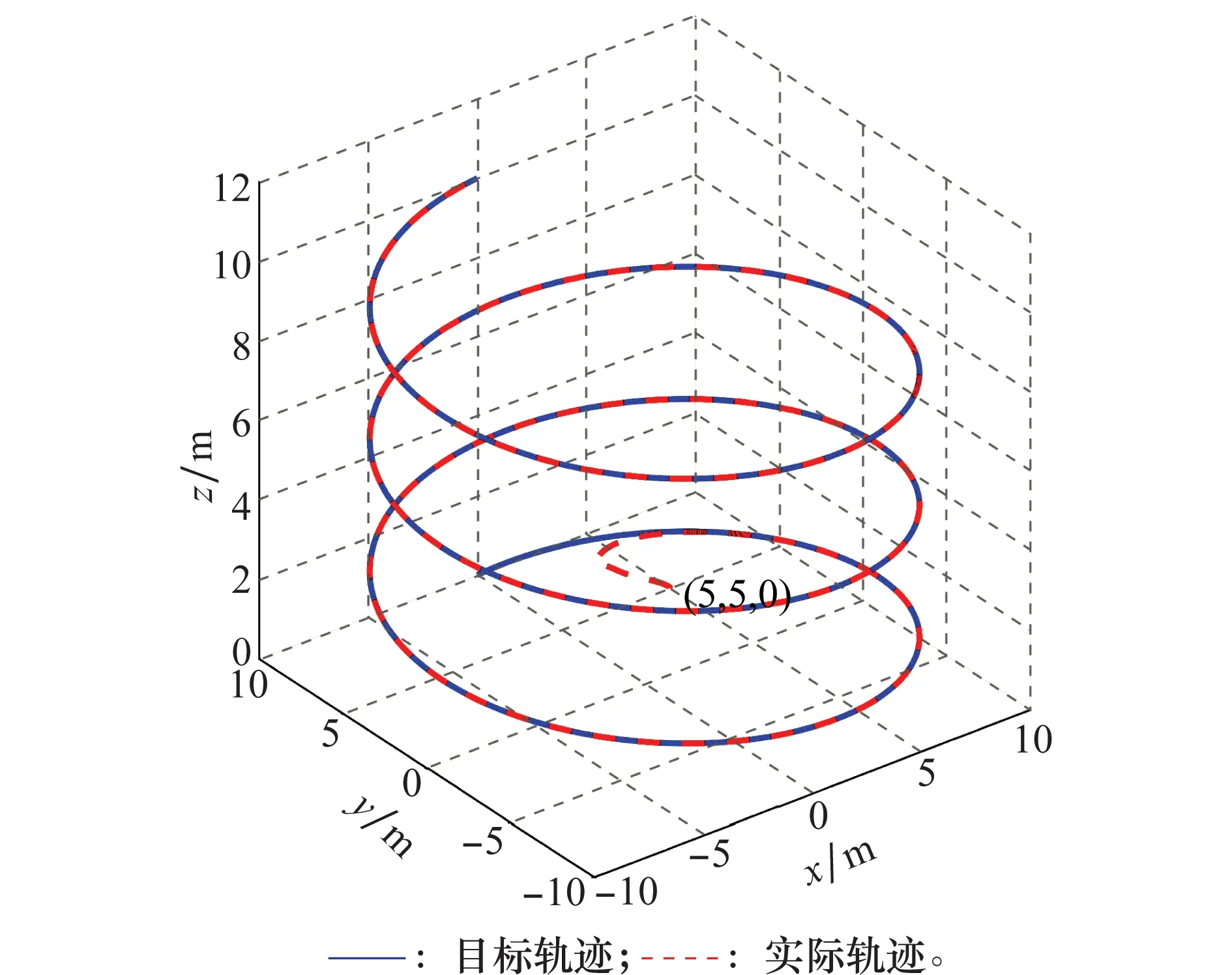
图2 四旋翼飞行器轨迹跟踪曲线Fig.2 Curves of quadrotor unmanned aerial vehicle trajectory tracking

图3 四旋翼飞行器姿态角度跟踪曲线Fig.3 Curves of quadrotor unmanned aerial vehicle attitude angles tracking

图4 轨迹和姿态角度跟踪误差曲线Fig.4 Curves of trajectory and attitude angles tracking errors

图5 观测器估测线速度历时曲线Fig.5 Curves of translational velocity observation versus time

图6 观测器估测角速度历时曲线Fig.6 Curves of angular velocity observation versus time
图7和图8分别为位置部分和姿态部分广义扰动观测曲线,可见ESO可以准确地观测出广义扰动,从而有效地提高飞行器轨迹跟踪控制精度和鲁棒性。
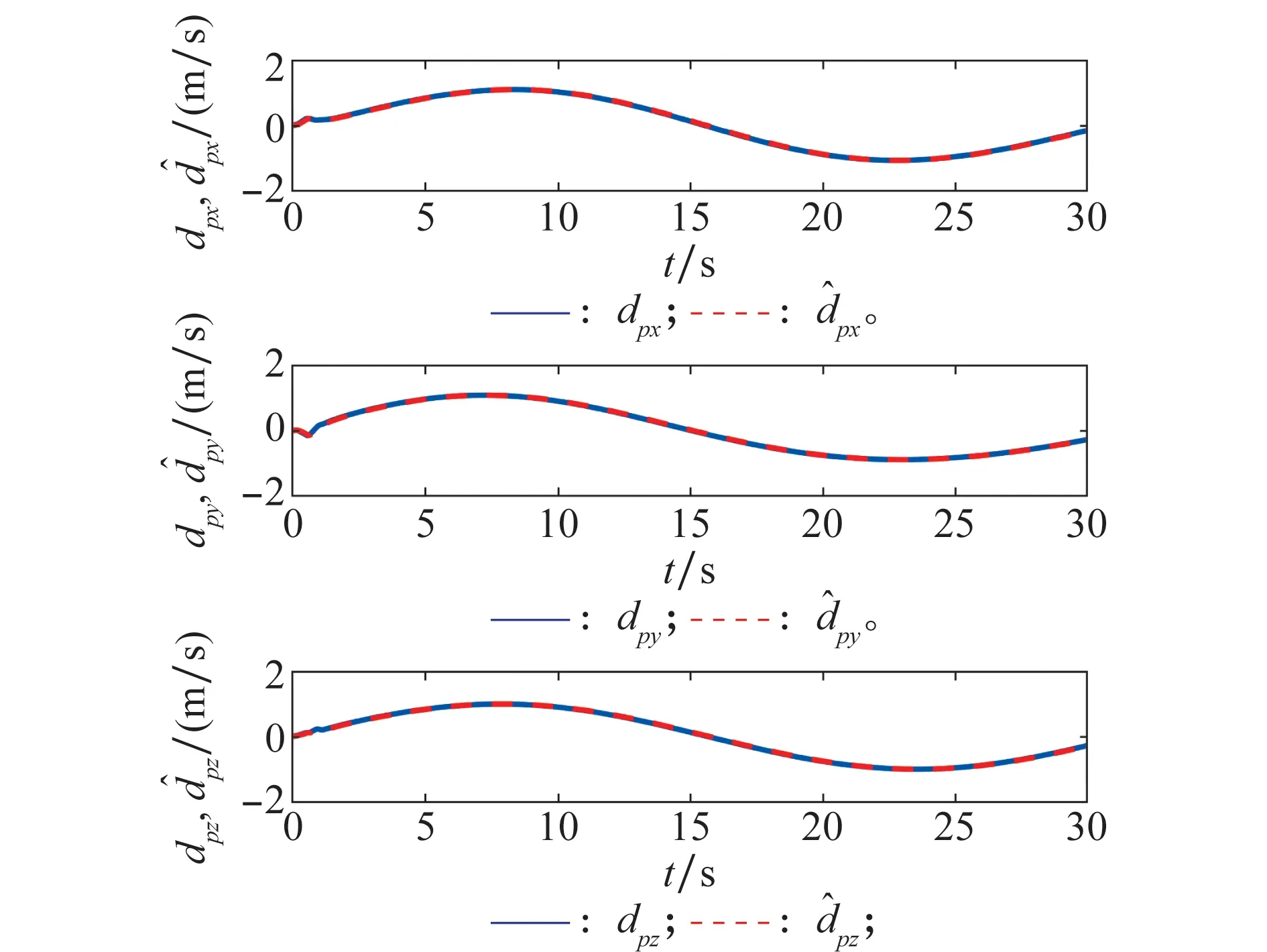
图7 位置部分广义扰动观测曲线Fig.7 Curves of position’s generalized disturbances observation

图8 姿态部分广义扰动观测曲线Fig.8 Curves of attitude’s generalized disturbances observation
图9为升力和力矩曲线,τj表示系统控制输出,g(τj)表示执行器输入。

图9 升力和力矩曲线Fig.9 Curves of thrust and torque
分析图9可知飞行器控制输出τj在0~0.8 s幅值明显超出执行器可执行范围,经本文带有误差补偿的限制策略后,执行器输入g(τj)的幅值被限定在安全范围之内,同时饱和补偿项实时对跟踪误差进行受限补偿,有效避免了控制输入饱和引起的飞行器失控,能够为飞行器提供更加安全可靠的控制量。
5.2 矩形轨迹跟踪仿真
矩形轨迹设定为
xd=10{[tanh(t-10)-tanh(t-30)]/2}
yd=10{[tanh(t-20)-tanh(t-40)]/2}
图10为矩形轨迹跟踪曲线,从图10中可以看出经3 s左右时间飞行器从起飞点(5,5,0)处快速准确地到达预定轨迹的起始点(0,0,2)处并沿预定矩形轨迹飞行。

图10 四旋翼飞行器矩形轨迹跟踪曲线Fig.10 Curves of quadrotor unmanned aerial vehicle rectangular trajectory tracking
图11为轨迹和姿态角度跟踪误差曲线,显然在5 s之前误差快速收敛,并在本文设定的相对复杂的工况下保持较高的跟踪精度。

图11 轨迹和姿态角度跟踪误差曲线Fig.11 Curves of trajectory and attitude angles tracking errors
图12为升力和力矩曲线,由0~3 s仿真数据可知控制量在3 s左右达到平稳状态,由3~45 s仿真曲线可以看出在10 s,20 s,30 s,40 s这些需要飞行器状态做出较大调整的时刻,控制器可以很快做出调整并迅速恢复平稳,并且经本文限制策略后,幅值限定在给定的界值范围之内,说明本文设计的带有限制函数和补偿策略的执行输入能够有效应对控制饱和问题。
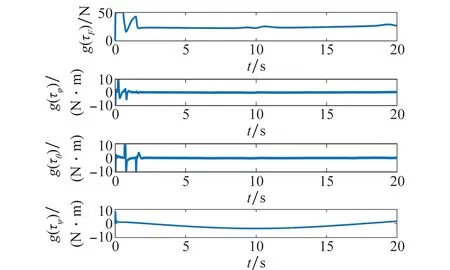
图12 升力和力矩曲线Fig.12 Curves of thrust and torque
6 结 论
针对六自由度四旋翼飞行器存在模型不确定性、外界未知干扰、速度不可测和输入受限等情况,构造ESO估测飞行器速度信息和广义扰动。引入反演法和动态面技术,设计基于ESO的输入受限四旋翼飞行器轨迹跟踪输出反馈控制器。以大疆 M100为被控对象分圆形轨迹和矩形轨迹两种情况进行轨迹跟踪仿真。结果表明,本文所述方法对模型不确定性和复合扰动表现出较强的鲁棒性,同时能够有效应对速度不可测的情况,解决了因输入饱和限制导致的控制输出不稳定问题,对工程实践具有一定的指导意义。
