基于降维的双基地MIMO雷达收发阵列互耦和幅相误差校正算法
2018-12-10杨守国张昆辉郭艺夺
杨守国,李 勇,张昆辉,郭艺夺
(1.空军工程大学防空反导学院,陕西 西安 710051;2.西北工业大学电子信息学院,陕西 西安 710072)
0 引 言
基于阵列参数模型的双基地多输入多输出(multiple input multiple output,MIMO)雷达高分辨角度估计算法[1-3],以其优良的高分辨性能受到了人们广泛的关注。但高分辨算法庞大的运算量和对误差的低鲁棒性一直是限制其实际工程应用的重要瓶颈。随着高速数字信号处理器的不断更新和发展,以及人们对并行快速算法和次最优算法的深入研究,高分辨算法实时实现的问题得到了根本的缓解,但对阵列误差校正和鲁棒的角度估计算法的研究还很不完善。各种高分辨角度估计算法依赖对阵列参数模型准确的先验知识,如典型的多重信号分类(multiple signal classification,MUSIC)算法需要阵列可见区域(field of view,FOV)内阵列流形的精确信息,旋转不变子空间(estimation of signal parameters via rotational invariance techniques,ESPRIT)算法虽然避免了对阵列流形的校正,但需要两个特性完全相同的子阵结构。这些在实际应用中往往是无法实现的,人们对阵列模型已有的先验知识往往都有一定的偏差。另外,各种高分辨的空间谱估计算法对误差的鲁棒性能很差,对模型误差往往很敏感[4-5],会导致角度估计性能随模型的微小扰动而急剧下降。因此,在双基地MIMO雷达的工程实际应用中,简单有效的阵列校正方法具有重要的意义。
现有的双基地MIMO雷达阵列校正方法大多只考虑存在一种阵列误差(阵元互耦、阵元幅相或阵元位置)的情况[6-12]。针对收发阵列阵元互耦问题,文献[6]给出了一种基于ESPRIT的双基地MIMO雷达多目标定位及互耦自校正算法,该算法计算量小,无需任何谱峰搜索,但角度估计精度较差;文献[7]利用两个一维谱峰搜索首先估计出目标的二维角度,在此基础上得到收发阵列的互耦矩阵,从而实现阵列误差的自校正;文献[8]基于张量分析理论提出了一种实值子空间的目标二维角度估计算法;同时,对于收发阵列阵元幅相误差校正问题,文献[9]提出了一种基于辅助阵元法(instrumental sensors method,ISM)的ESPRIT类(ESPRIT-like)算法,但该算法角度和幅相误差矩阵估计性能均较差。为了解决这个问题,文献[10]提出了一种基于传播算子类法的联合角度和幅相误差估计方法;文献[11]首先通过三线性分解算法来估计目标的二维角度,然后用拉格朗日乘数法得到幅相误差矩阵;文献[12]提出了基于ESPRIT算法的角度和幅相误差联合估计方法等。然而,在工程实际应用中,通常会遇到雷达收发阵列同时存在多种误差形式,在这种情况下,上述的各种算法性能将会严重下降甚至完全失效。如何对存在两种以上阵列误差进行校正是目前遇到的一个难点,相关的研究成果报道比较少。针对这个难题,考虑在收发阵列中增加辅助阵元来保证扰动参数估计可用的信息量,这是因为阵列扰动与方位有关,要进一步提高扰动参数估计可用的信息量,增加辅助信源的方法已不再有效。基于这一思想,本文通过在双基地MIMO雷达的收发端都引入若干个经过精确校正的辅助阵元(假设这些阵元不存在互耦和幅相误差),并利用子空间理论,提出了一种基于降维的目标二维角度及收发阵列互耦和幅相误差矩阵的联合估计算法。该算法只需要参数的一维搜索,不存在参数联合估计的局部收敛问题。
1 互耦和幅相误差的阵列信号模型
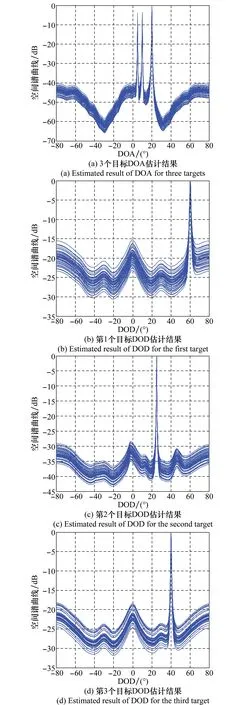
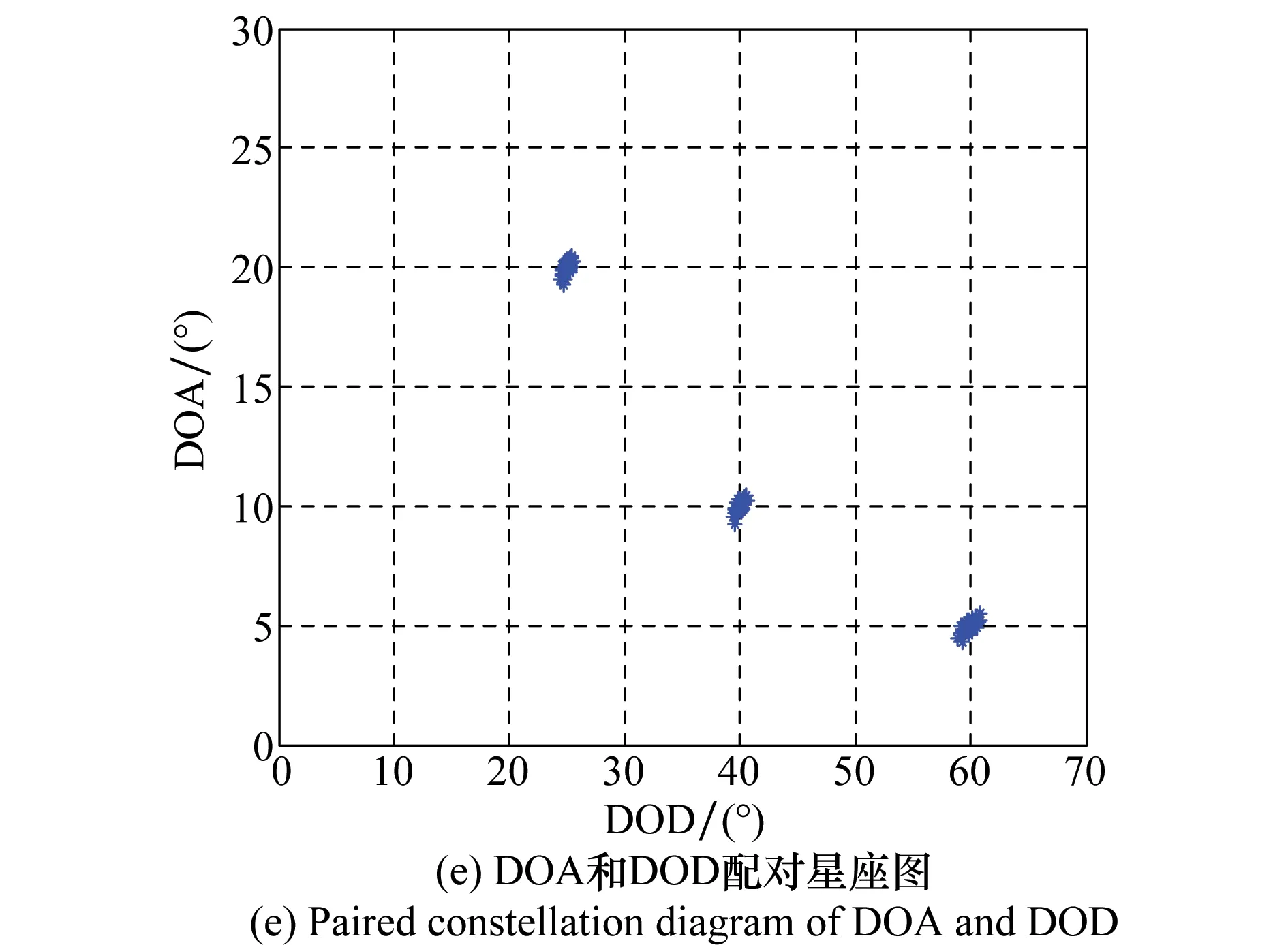
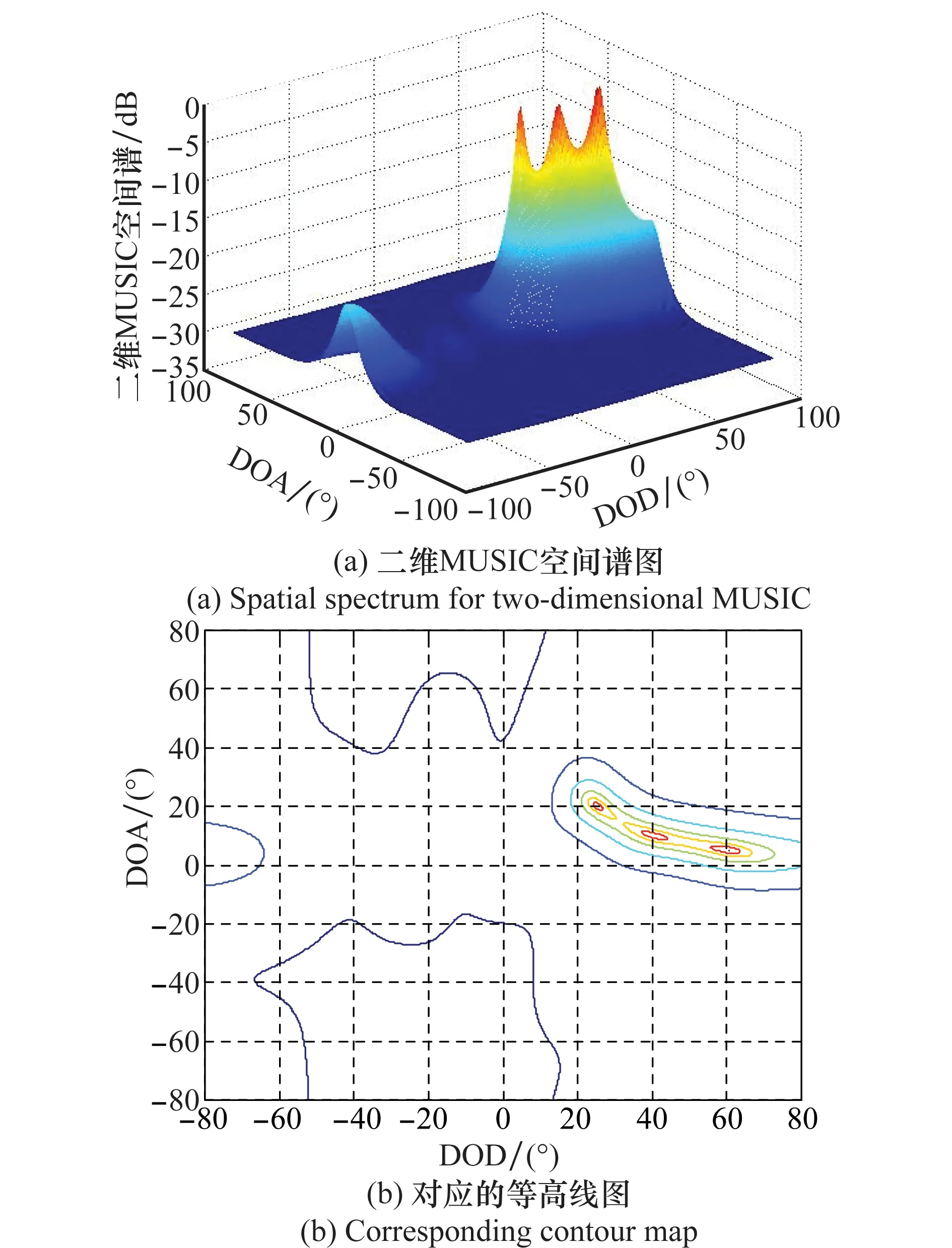
考虑一个具有M个发射阵元和N个接收阵元的双基地MIMO雷达系统,其收发阵列都是阵元间距为半波长的均匀线阵。假设在阵列远场的同一距离单元,存在P个非相关的目标,它们的波离方向(direction of departure,DOD)和波达方向(direction of arrival,DOA)分别为φp和θp。记发射和接收阵列的互耦自由度分别为kt,kr(kt Ct=toeplitz(ct,ct),Cr=toeplitz(cr,cr) (1) 式中,ct表示Ct的循环矢量,ct=[ct1,…,ctkt,0,…,0],0<|ctkt|<… 为了克服收发阵列的互耦和幅相误差带来的影响,这里分别在接收阵列和发射阵列中引入kr和kt个经过精确校正的阵元,其间距仍然是半波长,但是其与原收发阵列之间的距离足够远,使得其与原收发阵列的互耦效应可以忽略不计,假设其与原阵列的间距分别为dt和dr。这里假设精确校正的阵元之间不存在阵元互耦误差,且自身不存在幅相误差。图1给出了在原发射和接收阵列中分别增加辅助阵元后的双基地MIMO雷达阵列模型。 图1 增加辅助阵元后的双基地MIMO雷达阵列模型Fig.1 Arrays model of bistatic MIMO radar by applying several instrumental sensors 根据以上阵列模型,接收的回波信号经过匹配滤波器后,可以表示成 (2) 为了利用文献[13]中的定理1,通过矩阵运算可以将收发阵列的互耦和幅相误差矩阵转换成角度依赖的误差矩阵,所以式(2)可进一步写成 (3) 因此,基于式(3)可以得到协方差矩阵为 R=E[x(t)xH(t)]= (4) 对R做特征值分解,可得其噪声子空间Un。利用子空间原理,可得 (5) 由于目标的二维角度、互耦和幅相误差系数都是未知的,要对其求解需要进行多维参数搜索,所以计算量非常庞大,实际中是很难实现的,而且当初始值与真值偏离较远时,会出现无法局部收敛的问题。为了避免多维参数搜索问题,这里采用降维的方法来进行估计。 根据文献[13]中的定理1,我们知道:对于一个任意的M×1维的复矢量X和任意的M×M维的复对角阵D,有 D·X=Q1(X)·d (6) 式中,di=Dii(i=1,2,…,M)是M×1维的复矢量;[Q1(X)]ij=Xi·δij(i,j=1,2,…,M)是M×M维的复矩阵, (7) 式中, αt(φ)δt(φ) (8) 将式(7)和式(8)代入式(5)中,并利用Kronecker积的性质,可得 δH(θ,φ)[IN+1⊗αt(φ)]HQ1(θ)[IN+1⊗αt(φ)]δ(θ,φ)=0 (9) δ(θ,φ)=δr(θ)⊗δt(φ) (10) (11) 注意到对于不同的角度θ和φ,[IMr+1⊗αt(φ)]δ(θ,φ)不可能恒等于0。因此,式(9)成立的充要条件是当(θ,φ)={(θ1,φ1);(θ2,φ2);…;(θP,φP)}时,矩阵Q1(θ)为奇异矩阵[14-15]。基于此原理,可以得到 (12) 或 (13) 通过式(12)和式(13),可以得到目标DOA的估计值。基于对DOA的估计,并观察到δ(θ,φ)的第一个元素为1,于是可以通过求解下面带约束条件的优化问题来对目标的DOD和δ(θ,φ)进行估计,得 (14) (15) 式中,e1=[1,0,…,0]T。 对式(14)应用拉格朗日算子法求解,可得 p=1,2,…,P (16) 通过对φ在(-90°,90°)范围内进行谱峰搜索,即可获得目标DOD的估计值,实现二维角度的自动配对,然后利用估计的DOA和DOD就可进一步得到δ(θ,φ)的估计值。 (17) 式中,⊙表示的是Hadamard积。 由于估计的目标DOA存在一定的误差,根据式(17)可以建立优化函数为 (18) 假设接收阵列互耦矩阵Cr是已知的,那么式(18)可进一步写成 (19) 利用文献[13]中的定理3,进而可将Θ写成 (20) T(Jn)=T1(Jn)+T2(Jn) (21) 根据式(19),可以求得其最优解为 (22) 将式(22)代入式(19),可得关于Cr的优化问题,即 (23) (24) (25) 仿真1所提降维算法对目标二维角度进行估计的结果 仿真过程中取信噪比(signal-to-noise ratio,SNR)为10 dB,快拍数设为256。图2给出了采用所提降维算法对目标二维角度进行估计的结果,其为50次蒙特卡罗实验的统计结果。从图2可以看出:在收发阵列存在互耦及幅相误差的条件下,所提算法不需要预知误差系数,就可以较为精确地获得目标DOD和DOA的估计值,并对估计的结果自动配对。因此,该算法可在收发阵列存在互耦及幅相误差条件下实现对多目标的精确定位。 图2 目标二维角度的估计结果Fig.2 Estimated result of two-dimensional angle for targets 仿真2算法二维角度估计的统计性能 图3 目标角度估计的RMSE随SNR变化曲线Fig.3 Curve of RMSE of angle estimation versus SNR 从蒙特卡罗仿真实验的结果可以看出,所提算法对目标收发方位角进行估计时,的确不需要任何互耦及幅相误差信息,就可以获得良好的估计性能。 仿真3收发阵列校正前后二维MUSIC算法的空间谱曲线及其等高线图 本仿真主要考察所提算法的互耦及幅相误差自校正结果。图4给出了校正前收发阵列互耦和幅相误差矩阵未知情况下的二维MUSIC算法的空间谱曲线及其对应的等高线图。图5是自校正后的空间谱曲线及其对应的等高线图。 图4 校正前互耦及幅相误差矩阵未知的情况Fig.4 Situation of unknown mutual coupling and gain-phase error matrices before calibration 图5 采用所提算法进行互耦及幅相误差自校正后情况Fig.5 Situation of mutual coupling and gain-phase error calibrated by the proposed algorithm 由图4和图5可以看出,校正前互耦及幅相误差矩阵未知的情况下,二维MUSIC算法的空间谱变化平缓,在空间中目标方位处无法形成谱峰,导致不能有效分辨这3个目标。而采用所提算法校正后可在目标收发方位处形成明显而尖锐的谱峰,从而能较好的分辨这3个目标。 本文提出了一种适用于双基地MIMO雷达收发阵列互耦和幅相误差校正的降维算法。该算法在原收发阵列中分别增加一些辅助接收和发射阵元,而这些辅助阵元都经过精确校正,这样在空间存在多个目标的情况下,既可以对每个目标的收发方位角,又可以对雷达收发阵列的互耦及幅相误差矩阵进行无模糊的联合估计。该算法的优点在于在联合估计过程中,不需要提前知道收发阵列的误差系数等信息,通过引入辅助阵元来避免通常自校正算法导致的参数估计模糊问题,而且算法运算量较小,只需两个一维的谱峰搜索,不存在参数联合估计的局部收敛问题。此外,该算法也不需要对第一个收发阵元的幅度和相位误差做归一化处理,从而使得误差模型更加符合实际情况。

2 基于降维的联合估计算法
2.1 目标二维角度估计







2.2 互耦和幅相误差系数估计








3 计算机仿真




4 结 论
