汽车LED点阵灯驱动系统的设计
2018-12-08谢建毅
谢建毅
汽车LED点阵灯驱动系统的设计
谢建毅
(常州通宝光电股份有限公司,江苏 常州 213001)
文章介绍一种新颖的夜间照明方式,旨在通过增加汽车的主动安全性能去改善汽车的夜间的照明情况,从而达到减少夜间因照明问题引发的交通事故。根据汽车对夜间照明的要求,设计了点阵式LED车灯的驱动系统并合理的装配了硬件设备。根据汽车LED驱动系统应具备的功能,设计了驱动系统程序的数据处理方式。
汽车LED前照灯;驱动系统;安全照明
引言
中国汽车销售量已经连续九年蝉联世界第一,并且汽车销量增速高于市场预期,预测中国汽车的保有量将在2019年超越美国,成世界汽车保有量第一大国。随着中国经济的继续快速发展,中国的汽车夜间行驶频率也大幅提高,据统计,汽车在光线不足的晚上行驶里程占其整个行驶里程的 25%,然而,在这种行驶环境下所发生的交通事故占到整个交通事故总数的33%,死亡事故占总死亡事故的 50%,其中 60%与汽车灯具照明不良有关[1]。因此对汽车照明系统的提高提出迫切的要求。
1 汽车LED点阵灯的功能介绍
现今,在中高档汽车装配机械式汽车主动照明系统ADB(Adaptive Driving Beam)。机械式ADB大灯可以在汽车在夜间行驶时,可根据汽车行驶车速以及汽车的行驶环境去改变车灯照射的方向、范围、距离等,用来满足驾驶员对于夜间照明的要求。但是上述的主动照明系统存在着机械结构复杂、光能转化率不高、主动响应迟滞、造价高昂、散热困难等缺点,限制了主动照明系统的发展以及大批量的推广应用。
汽车LED点阵灯可根据装配在车辆上的传感器以及识别系统来判断周围行驶车辆或行人的实时位置,及时的熄灭照向前方车辆或行人区域的灯泡,从而避免了对向驾驶员或行人产生炫目的情况;在弯道行驶时,车灯驱动系统调整车灯的照明区域扫除弯道照明盲区;前方有障碍物时,增强该部分照明区域的灯光;根据行驶车速和行驶环境自动切换远近光等。同时相比于传统的自适应照明系统,LED点阵灯结构简单、造价低廉、光能转化率高、节能环保、反应迅捷等优点。综合性能远远高于前者,适合大规模生产和推广,具有较高的商业价值。
2 汽车LED点阵灯驱动系统的结构设计和硬件选择
为了设计出一套完整实用的车灯照明系统,无论是车灯的软件还是硬件都应该被纳入考量中。硬件方面需要由各种传感器来获取车身以及汽车周围的数据和信息。例如,车身高度传感器、车速传感器、方向盘转角传感器、横摆角速度传感器以及毫米波雷达和道路识别摄像头[2]。传感器获取的信息输送至信息处理系统,ECU处理信息后给执行机构即LED车灯输出执行命令。
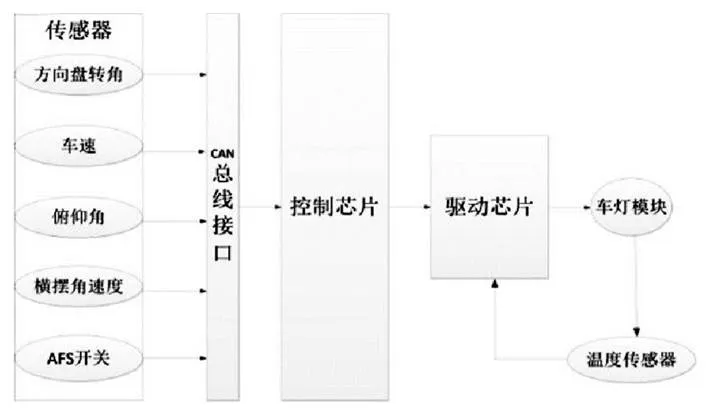
图1 驱动系统的结构设计图
车身各部分传感器将自身测得车身状态信息传输至CAN总线,同时ECU接收来自于道路识别摄像头的道路信息和毫米波雷达对附近车辆距离信息,通过CAN总线接口输送到控制芯片,控制芯片经过逻辑运算后输出驱动电平到驱动芯片,驱动芯片用来控制点阵式LED灯组的开闭或明暗状况,从而改善车辆前方照明情况[1],同时也避免了造成前方驾驶员炫目的情况,可使驾驶员清楚的分别出前方障碍物和行人。
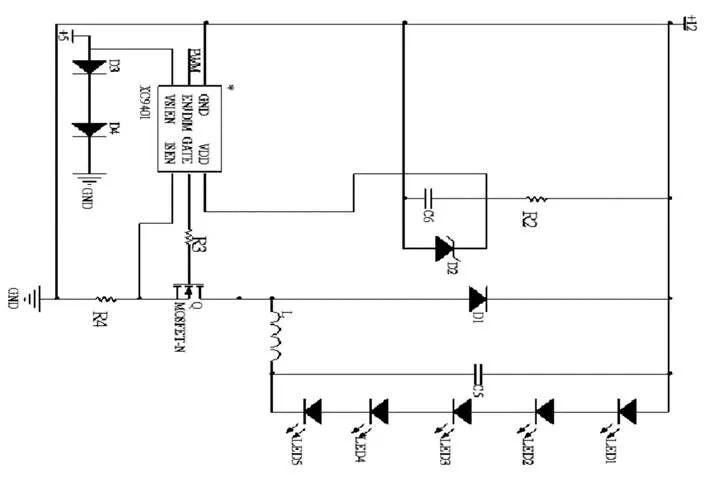
图2 LED驱动电路图
电控式执行机构不需要连杆齿轮等机构来进行传输动力,只需要驱动电路的驱动执行即可。因此执行机构除需要可以准确控制车灯模块运转的LED驱动电路。照明系统选择了XC9401系列作为LED照明电路的控制器,每个LED驱动控制电路控制5个LED灯泡,该电路可以根据CPU传递过来的信息改变该电路的控制电流,改变LED灯泡的明暗程度[3]。
在电控系统中控制芯片CPU是整个系统的大脑,也是所有指令发起点,因此CPU的选择就显得尤为重要。CPU既要接收来自各传感器测量的信息,也需要将接收来的数据信息进行逻辑运算,运算的程序是由编程人员事先完成的。经过逻辑运算的结果,CPU通过给执行器输出电平的方式来驱动。该系统选择飞思卡尔公司推出的单片机中的一款增强型单片机MC9S12XS128(简称为XS128),XS128单片机在汽车控制领域、工业控制领域、中高档电子产品的应用领域有着极大的应用范围[4]。XS128单片机具有位数(8位、10位、12位)可选精度;8通道PWM驱动器;高速CAN总线传播通道[5]。该控制芯片可以满足本次设计的驱动系统的要求。

图3 XS128芯片引脚图
3 控制系统程序的设计
车灯执行命令的依据是根据车身各部传感器获取的信息以及道路感知信息,但是测量的数据较多,数据的处理总有先后顺序和重要的优先级。并且照明系统以后的专业化编程也需要大体的程序设计流程的指导。

图4 系统的主程序流程图
点阵式LED驱动系统的主程序主要由下列几个模块组成,系统初始化模块是一个完整的系统必须具备的;系统的软硬件是否可以正常执行指令需要故障检测模块来执行;照明区域计算模块用来判断下一时刻的照明区域;照明区域控制模块用来执行上层指令[6]。下文将着重的介绍系统的照明区域计算模块。
点阵式LED驱动系统的主控制程序的大体框图如图3-12所示,汽车启动电源接通照明系统后,需要对系统的初始数据进行重置并且将各寄存器清零、复位等,同时初始化驱动系统的硬件和软件[7]。
4 总结
本文提出了点阵式LED驱动系统设计理念以及具体的操作步骤,依据汽车在夜间实际情况下的照明需求设计了上述驱动系统的结构和指令。结合电路的运行方式,较为详细的介绍了车灯模块的运行方式,但是考虑到篇幅以及本文作者知识的局限性,目前只有能力做出一个较为简易的版本,但是也足以去说明点阵式LED驱动系统的优越性能。
希望本文可以对点阵式LED驱动系统的发展有着积极的促进作用,可以让LED自适应前照灯应用到更多的汽车上,真正的做到科技为人服务的目的,为汽车行业的发展和减少行车事故做出贡献。
[1] 郑志军.智能前照灯系统的发展[J].中国照明电器, 2006,(6): 8~11.
[2] 李良寿.汽车传感器的技术分析[J].仪表技术与传感器.2006(04): 65~67.
[3] Denso Corporation(JP). Head Light Device for Vehicle[P]. United States: US 7500769 B2, 2009. 03. 10:132~142.
[4] 戎辉,龚进峰,曹健.自适应前照灯运动学建模及系统开发[J].汽车工程,2008,30(12):1079-1082.
[5] 贾培峰.汽车自适应前照灯照明系统的仿真及控制研究[D].长安大学.2012:25~30.
[6] 胡品超.基于单片机的汽车智能前照灯系统的研发[D].武汉理工大学.2011:23~27.
[7] 卜伟理.AFS(前照灯自适应)系统相关法规的研究分析[D].上海交通大学.2009: 13~20.
Design of Vehicle LED Dot Array Light Drive System
Xie Jianyi
( Changzhou Tongbao Optoelectronics Co., Ltd., Jiangsu Changzhou 213001 )
In this paper, a novel nighttime lighting method is introduced, which aims to improve the night lighting by increasing the active safety performance of the vehicle. so as to reduce the traffic accidents caused by the lighting problems at night. According to the requirement of automobile for night lighting, the driving system of dot matrix LED lamp is designed and the hardware equipment is reasonably assembled. According to the function of automobile LED drive system, the data processing mode of driving system program is designed.
Automobile LED headlight; Driving system; Safety lighting
A
1671-7988(2018)22-144-03
U462
A
1671-7988(2018)22-144-03
U462
谢建毅,就职于常州通宝光电股份有限公司。
10.16638/j.cnki.1671-7988.2018.22.051
