电动汽车行驶状态扩展卡尔曼软测量*
2018-12-08郝亮
郝亮
(辽宁工业大学)

当今汽车上多样化的先进电子控制系统、故障诊断以及容错控制系统等策略能够有效实现,从原理上来分析,其取决于能够准确、实时地获取汽车行驶过程中的相关状态参数(比如质心侧偏角和车速等),从而实现对汽车行驶安全性的有效控制。但由于测量技术或者测量成本过高,要直接测量状态变量存在一定难度(比如质心侧偏角),为此寻找一种低成本、高精度和实时性好的获取车辆参数的方法至关重要。目前,基于状态估计的软测量技术已被成功应用于估计汽车的动力学和运动学参数。文献[1-2]采用卡尔曼滤波器(KF)估计汽车状态和参数;文献[3]提出动态KF,用于车辆实时定位状态估计;文献[4]提出了用2个扩展卡尔曼滤波器(EKF)同时工作的方法分别估计车辆的状态和参数;文献[5]则提出了一种状态参数联合估计的方法。文章采用实时性好、估计精度满足要求的车辆三自由度非线性模型,应用EKF软测量技术对电动汽车动态参数进行精确估计并加以验证。
1 车辆三自由度非线性数学模型
建立的车辆三自由度非线性数学模型是在线性二自由度车辆模型[6]基础上引入一个纵向车速。考虑到实际行驶过程中纵向车速是实时变化的,而且车速变化关联到横摆角速度和质心侧偏角状态变化,这样它们之间构成了非线性关系,建立起非线性三自由度汽车模型,如图1所示。该模型主要用于横向与纵向车速和质心侧偏角状态的软测量。图1中选用固结于车辆质心处的ISO坐标系,其中:x轴与汽车的纵向对称轴重合,规定向右为正;y轴通过车辆质心O点,规定向上为正。通过该模型可得到三自由度非线性汽车状态方程,分别如式(1)和(2)式所示。
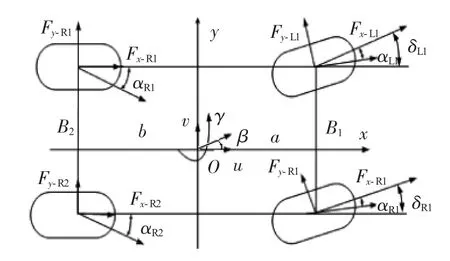
图1 非线性三自由度电动汽车模型

式中:ax,ay——电动汽车的纵向、侧向加速度,m/s2;
δ——前轮转角,(°);
m——总质量,kg;
Iz——绕z轴的转动惯量,kg·m;
k1,k2——前、后轴的等效侧倾刚度,N/rad。
2 EKF的软测量技术
2.1 软测量技术
软测量技术通常包括状态估计、神经网络、模糊数学和机理建模等相关分析技术。它主要根据比较容易测量的过程辅助变量来估计不可测量过程的主要输出,完成受限于硬件检测成本过高或者是实际硬件检测仪器所不能完成的测量任务[7]。文章采用状态估计的软测量技术,通过建立非线性三自由度电动汽车软测量模型,从可测信息集中通过运用EKF算法推出主导变量的估计值。
2.2 EKF滤波原理
EKF是对经典卡尔曼滤波器的扩展延伸,是一种将期望和方差线性化的卡尔曼滤波器,可用来处理非线性系统[8]。与Taylor级数类似,EKF在面对非线性关系时,通过求方程偏导方法将其线性化。
在T=0.02 s的采样周期内,可得到汽车状态方程的离散化表达式为:

式中:X——电动汽车状态变量,X=[γ,u,v,β]T;
Z——输出变量,Z=[ay]T;
J——控制变量,J=[δ,ax,ay]T;
ωk——系统激励噪声;
vk——量测噪声,ωk和vk应为相互独立的白噪声。
与经典卡尔曼滤波器类似,EKF的结构也可分为时间更新模块与测量更新模块。
其时间更新方程可由以下方程描述:

式中:A,H——函数f和h对状态X求偏导的雅克比矩阵,也称之为状态转移矩阵和观测矩阵;
W——系统激励噪声驱动矩阵;
Q——系统激励噪声协方差矩阵;
P-——向前推算协方差阵;
P——更新协方差阵;
K——增益矩阵;
3 Dugoff轮胎模型
为了更为准确地估算电动汽车的受力,采用Dugoff轮胎模型对汽车的侧向力和纵向力进行估计计算。依据Dugoff轮胎模型的定义,轮胎纵向力(Fx/N)和侧向力(Fy/N)跟滑移率(λ)、轮胎纵滑刚度(Cx/(N/m))、轮胎侧偏刚度(Cy/(N/m))等参数有关系[9]。
对于电动汽车的车轮,作用在每个轮胎上的侧向力和纵向力可用式(12)和式(13)表示[10-11]。

式中:Fz——轮胎垂向力,N;
μ——路面附着系数;
α——轮胎侧偏角,(°);
L——轮胎滚动边界值;
ε——速度影响因子。
4 仿真试验验证与分析
CarSim可以仿真车辆对驾驶员、空气动力学及各种路面输入的响应[12],在计算机上CarSim模型的运行速度要比实时快3~6倍,并且对试验环境和试验过程的定义非常方便灵活,通过简洁、易懂的界面可以详细地对整车各系统的特性参数和特性文件进行定义[13]。因此,文章通过CarSim软件建立整车模型,并在软件中设定虚拟试验的工况,将其与MATLAB/Simulink中搭建的EKF软测量估计模块和轮胎模型进行联合仿真,以便能够对车辆的纵向与侧向车速、质心侧偏角相关参数进行估计,进而验证建立EKF算法的有效性。
CarSim和Simulink联合虚拟仿真平台,如图2所示。基于 EKF 的车辆状态,通过 ax,ay,γ,δ这些传感器易测信号信息和轮胎模型输出的纵向与侧向力信息,可对不易测的β,u,v状态信息进行实时准确估计,进而有效实现了软测量技术。汽车行驶过程中的估计值可用于车辆ABS/ASR,EPS,ESP等主动安全控制系统。

图2 电动汽车状态估计仿真框图
根据ISO 3888-1双移线试验工况标准,在CarSim中设置状态的初始值为 x(t0)=[0,80/3.6,0,0]T。路面附着系数设定为0.85,电动汽车的仿真模型部分参数,如表1所示。

表1 电动汽车模型部分参数
EKF算法能够实现准确的车辆状态软测量,合理确定系统激励噪声协方差矩阵Q、测量噪声协方差矩阵R,误差协方差矩阵的初值P-(t0)的数值,这些参数对于保证估计精度至关重要。通过不断调试,最终得到3个参数值为:Q=1 000 I4×4,R=[1],P-(t0)=I4×4。
图3示出双移线恒定车速试验工况仿真试验曲线。


图3 双移线恒定车速下试验工况仿真试验曲线
从图3a和图3b可以看出,估计车速能够很好地跟踪CarSim软件输出的实际车速,而且实际车速与估计车速差值比较小,误差控制在0.005 km/h之内,有效证明了估计算法的准确性。从图3c和图3d可以看出,质心侧偏角的估计值跟CarSim软件输出的实际值差值也较小,其误差也控制在0.01°之内。从图3e可以看出,横向车速估计值对CarSim软件输出的横向车速实际值也有较好的跟踪效果。由此充分验证了估计算法能较为准确地估计电动汽车恒定车速行驶状态下的纵向车速、横向车速和质心侧偏角这些需高成本测量的参数,并且该技术具有良好的实时性。
5 结论
对于采用三自由度的非线性汽车模型在行驶过程中的状态估计问题,文章采用了一种基于EKF理论的软测量技术,通过CarSim与MATLAB/Simulink联合仿真的方式,在双移线工况下,通过容易实现低成本传感器测量的纵向加速度、侧向加速度、横摆角速度和转向盘转角车辆状态参数,对EKF软测量算法进行仿真试验验证,通过验证表明此算法能对车辆行驶状态进行准确估计且实时性较好。因此,采用软测量技术进行实车匹配、估计车辆运行状态成为一种可能,降低了车辆状态采集的成本,在实际应用中具有很好的应用前景。
